Arduino - Moteur
Nous allons apprendre :
- Quels types de moteurs peuvent être utilisés avec Arduino
- Quelles sont les différences entre les types de moteurs
- Comment contrôler chaque type de moteurs
#Types de moteurs
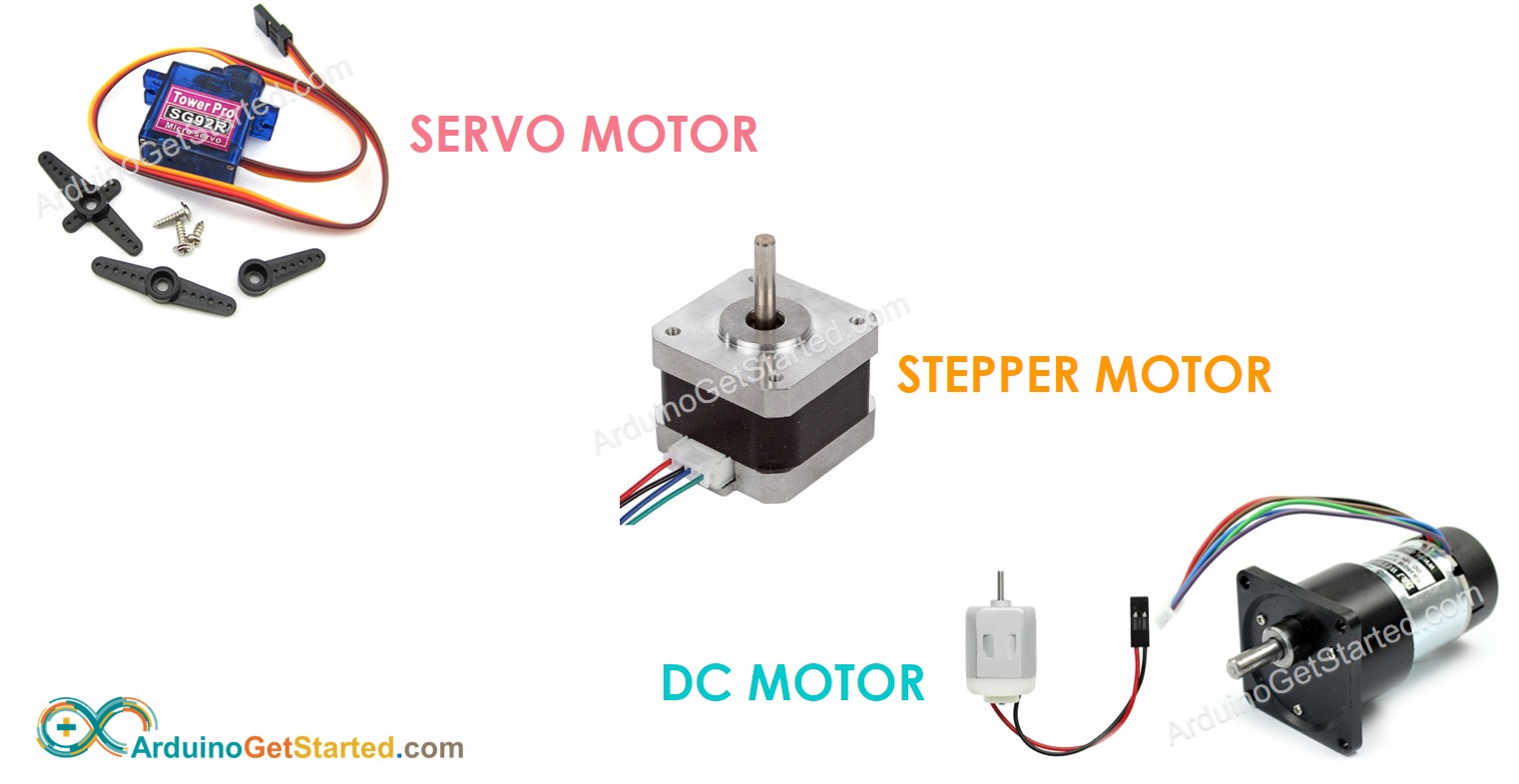
Il existe trois types de moteurs largement utilisés avec Arduino :
- Moteur servo
- Moteur pas à pas
- Moteur à courant continu
Le moteur servo comprend deux types principaux : moteur servo de 180° et moteur servo de 360°. En fait, la plupart des gens comprennent implicitement "moteur servo" comme étant un "moteur servo de 180°".
Un servo moteur à 360° est similaire à un moteur à courant continu, à l'exception qu'aucun pilote matériel n'est nécessaire.
Moteur servo à 180°
Caractéristiques
- La rotation est limitée entre 0° et 180°
- Sens de rotation : dans le sens des aiguilles d'une montre, dans le sens inverse des aiguilles d'une montre
- Position de rotation : peut être contrôlée pour tourner à un angle spécifique entre 0° et 180°
- Vitesse de rotation : peut être contrôlée, mais pas de manière fluide
- Pilote matériel supplémentaire : NON requis. Contrôle directement depuis une broche Arduino
- Alimentation supplémentaire : requise
- Comment contrôler : facile, utiliser simplement un signal PWM
Application
- Toute application qui nécessite seulement de tourner un angle entre 0° et 180°.
Tutoriel sur les servomoteurs
Moteur pas à pas
Caractéristiques
- La rotation est illimitée
- Sens de rotation : dans le sens horaire, dans le sens antihoraire
- Position de rotation : peut être contrôlée pour pivoter précisément à n'importe quel angle.
- Vitesse de rotation : peut être contrôlée avec précision. De plus, l'accélération et la décélération peuvent être contrôlées avec précision.
- Pilote de matériel supplémentaire : requis
- Alimentation supplémentaire : requise
- Comment contrôler : compliqué, les débutants devraient utiliser la bibliothèque
Application
- Automatisation et robotique
- Imprimantes, imprimante 3D, CNC, traceur X-Y
- Machine à cocktails
Tutoriel sur les moteurs pas à pas
Moteur à courant continu
Caractéristiques
- La rotation est illimitée
- Sens de rotation : dans le sens des aiguilles d'une montre, dans le sens inverse des aiguilles d'une montre
- Position de rotation : très difficile de tourner précisément à un angle spécifique
- Vitesse de rotation : facile à contrôler la rapidité, mais très difficile de contrôler précisément à une valeur de vitesse spécifique.
- Pilote matériel supplémentaire : requis.
- Alimentation supplémentaire : requise
- Comment contrôler : facile, il suffit d'utiliser un signal PWM haute tension.
※ Note:
- Pour contrôler la position d'un moteur à courant continu, nous avons besoin de matériel supplémentaire, appelé encodeur, puis utiliser une méthode de contrôle en boucle fermée telle que la méthode de contrôle PID. Ceci est très difficile pour les débutants.
- Pour le contrôle de la vitesse, nous pouvons facilement contrôler à quelle vitesse il tourne, comme lent, moyen, rapide, très rapide, combien de pour cent de la vitesse maximale. Cependant, pour contrôler le nombre de tours par seconde, nous avons besoin de matériel supplémentaire, appelé encodeur, puis utiliser une méthode de contrôle en boucle fermée telle que la méthode de contrôle PID. Ceci est très difficile pour les débutants.
- Certains moteurs à courant continu sur le marché sont équipés d'un encodeur intégré.
Application
- Utilisé pour contrôler quelque chose qui a besoin de tourner en continu mais la valeur de la vitesse n'a pas besoin d'être spécifiée. Par exemple, ventilateur, pompe, voiture RC, perceuse...
※ Note:
Il existe deux principaux types de moteurs à courant continu : les moteurs à courant continu à balais et les moteurs à courant continu sans balais. Le moteur à courant continu à balais est largement utilisé dans les projets de bricolage.
Tutoriel sur les moteurs à courant continu
Guide de sélection de moteur
Choisir un moteur pour un projet dépend de nombreux facteurs, tels que le poids transporté, l'alimentation électrique, les caractéristiques de l'application...
- Si votre projet nécessite une rotation à une position angulaire entre 0° et 180°, trouvez un servomoteur 180° adapté
- Si votre projet nécessite une rotation précise à n'importe quelle position, trouvez un moteur pas à pas approprié
- Si votre projet nécessite une rotation continue précise sans position spécifique, trouvez un moteur DC ou un servomoteur 360° adapté