Arduino - Voiture
L'un des projets les plus excitants pour les débutants Arduino est la création d'une voiture robot Arduino. Dans ce tutoriel, nous allons découvrir comment utiliser Arduino pour construire une voiture robot et la contrôler à l'aide d'une télécommande IR. Nous explorerons également un autre tutoriel où nous apprendrons à la transformer en voiture contrôlée par Bluetooth.

Préparation du matériel
Ou vous pouvez acheter les kits suivants:
| 1 | × | Kit de Démarrage DIYables STEM V3 (Arduino inclus) | |
| 1 | × | Kit de Capteurs DIYables (18 capteurs/écrans) |
À propos de la voiture robot
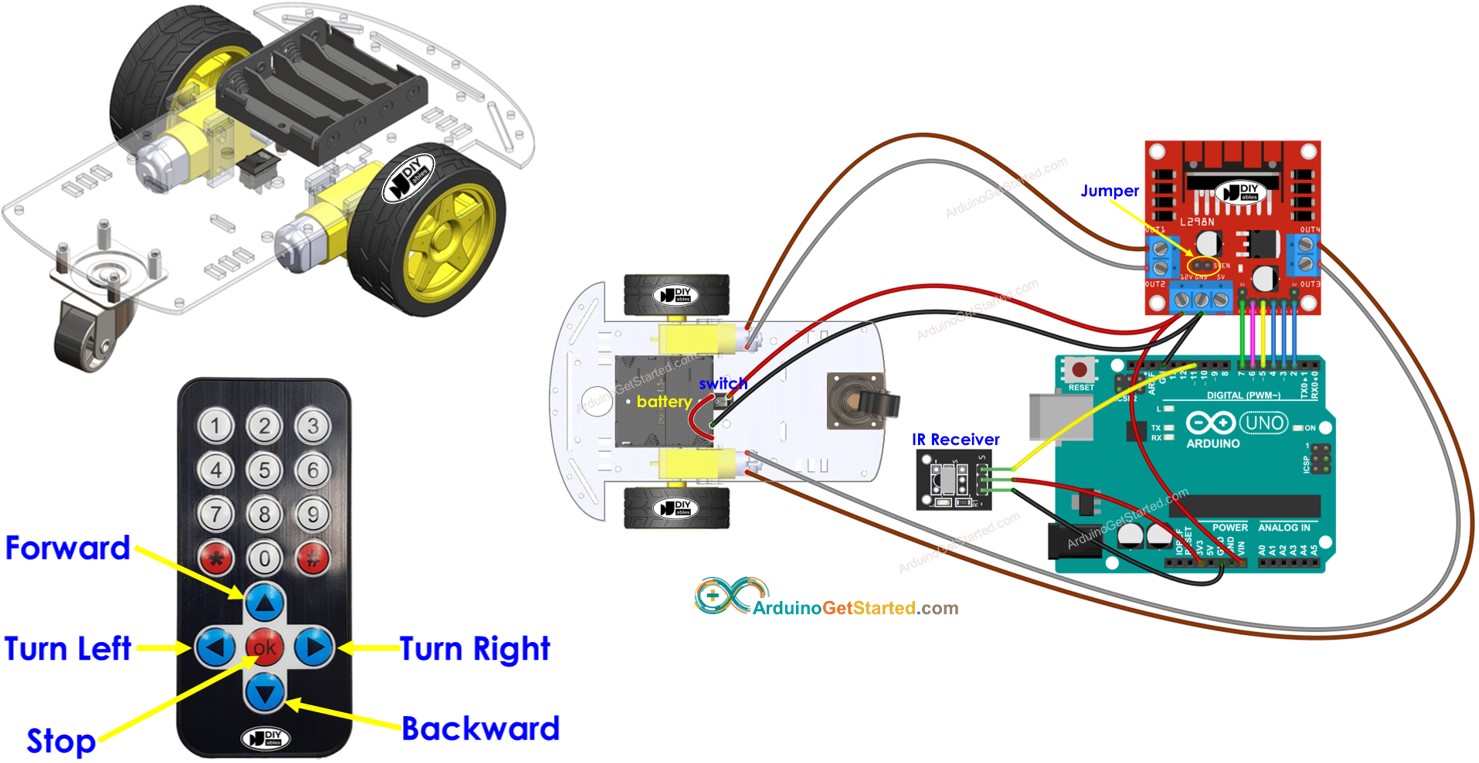
Dans le contexte Arduino, la voiture robot est couramment appelée voiture robot, voiture RC, voiture télécommandée, voiture intelligente ou voiture DIY. Elle peut être contrôlée à distance et sans fil à l'aide d'une télécommande IR ou d'une application smartphone via Bluetooth/WiFi... La voiture robot peut tourner à gauche ou à droite et avancer ou reculer.
Une voiture 2WD (Deux Roues Motrices) pour Arduino est un petit véhicule robotique que vous pouvez construire et contrôler à l'aide d'une carte Arduino. Elle est généralement composée des composants suivants :
- Châssis : La base ou le cadre de la voiture, où tous les autres composants sont montés.
- Roues : Les deux roues qui assurent la locomotion de la voiture. Elles sont attachées à deux moteurs à courant continu.
- Moteurs : Deux moteurs à courant continu sont utilisés pour entraîner les deux roues.
- Contrôleur de moteur : La carte contrôleur de moteur est un composant essentiel qui fait interface entre l'Arduino et les moteurs. Elle reçoit les signaux de l'Arduino et fournit la puissance et le contrôle nécessaires aux moteurs.
- Carte Arduino : Le cerveau de la voiture. Elle lit les entrées des capteurs et les commandes de l'utilisateur et contrôle les moteurs en conséquence.
- Source d'alimentation : La voiture 2WD nécessite une source d'alimentation, généralement des batteries et un porte-piles, pour alimenter les moteurs et la carte Arduino.
- Récepteur sans fil : un module infrarouge, Bluetooth ou WiFi pour la communication sans fil avec une télécommande ou un smartphone.
- Composants optionnels : Selon la complexité de votre projet, vous pouvez ajouter divers composants optionnels comme des capteurs (par exemple, des capteurs à ultrasons pour l’évitement d’obstacles, des capteurs de suivi de ligne), et plus encore.
Dans ce tutoriel, pour simplifier, nous utiliserons :
- Kit de voiture 2 roues motrices (comprenant Châssis, roues, moteurs, porte-piles)
- Contrôleur de moteur L298N
- Kit infrarouge IR (comprenant une télécommande IR et un récepteur IR)
Consultez la liste du matériel en haut de cette page.
Comment ça marche
- Arduino se connecte aux moteurs à courant continu de la voiture robot via le module pilote de moteur L298N.
- Arduino se connecte à un récepteur IR.
- La batterie alimente l'Arduino, les moteurs à courant continu, le pilote de moteur et le récepteur IR.
- Les utilisateurs appuient sur les touches HAUT/BAS/GAUCHE/DROITE/OK de la télécommande IR.
- Arduino reçoit les commandes HAUT/BAS/GAUCHE/DROITE/OK via le récepteur IR.
- Arduino contrôle la voiture pour avancer/reculer/tourner à gauche/tourner à droite/s'arrêter en contrôlant le moteur à courant continu via le pilote de moteur.
Diagramme de câblage
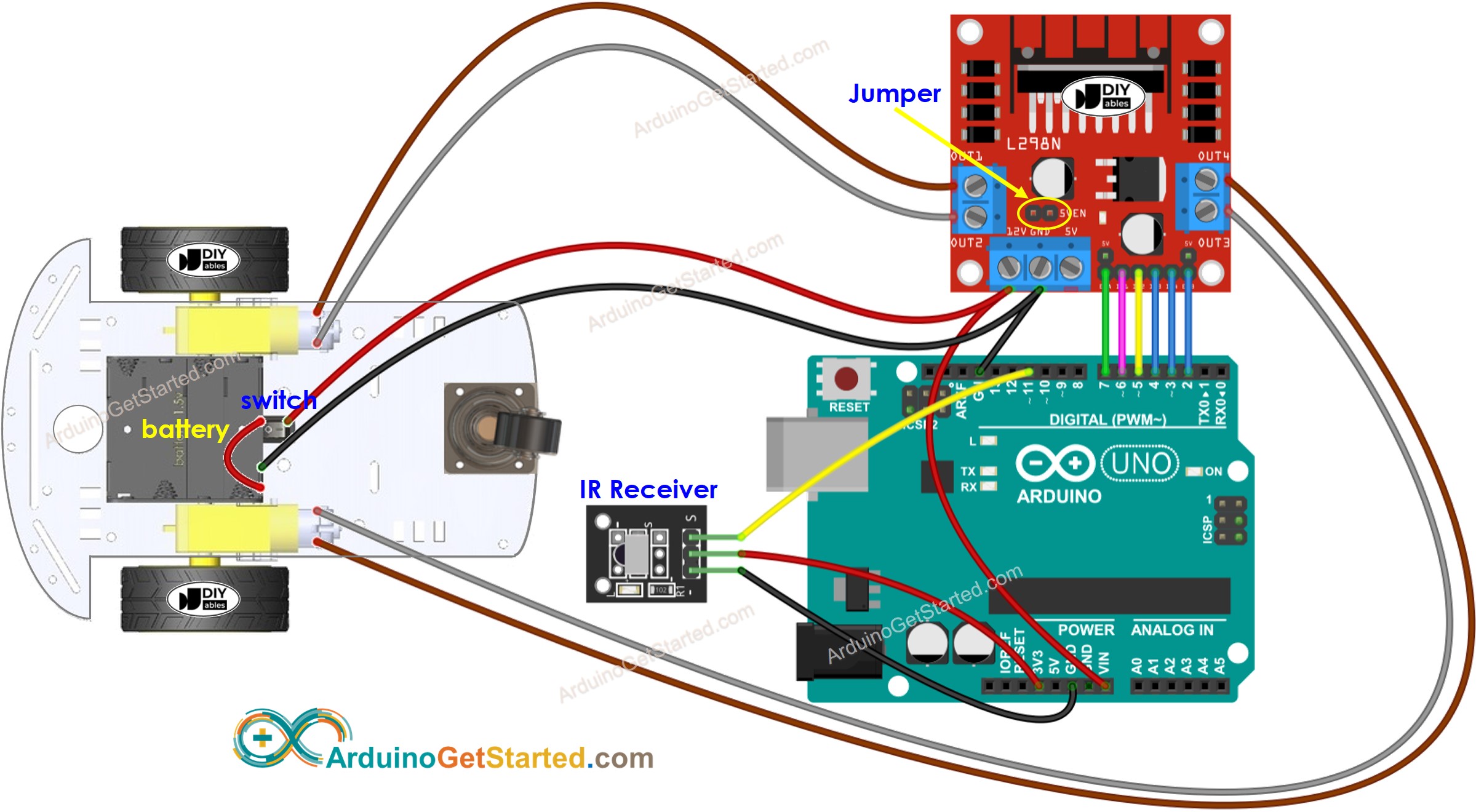
Cette image a été créée avec Fritzing. Cliquez pour agrandir l'image.
Habituellement, nous avons besoin de deux sources d'énergie :
- Une source d'alimentation pour le moteur (indirectement via le module L298N).
- L'autre source d'alimentation pour la carte Arduino, le module L298N, le récepteur IR.
Cependant, il existe une manière d'utiliser une seule source d'alimentation pour tout. Vous pouvez utiliser quatre piles de 1,5 V (pour un total de 6 V) à cette fin. Voici comment nous pouvons procéder :
- Connectez les batteries au module L298N en suivant le schéma ci-dessus.
- Retirez deux petits connecteurs (cavaliers) qui relient les broches ENA et ENB à 5 volts sur le module L298N.
- Placez un connecteur spécial (cavalier) étiqueté 5VEN, marqué d'un cercle jaune sur le schéma ci-dessus.
- Connectez la broche 12V sur la borne à vis du module L298N à la broche Vin sur la carte Arduino. Cela alimente directement l'Arduino depuis la batterie (6V au total).
Veuillez noter que pendant la période de développement, lorsque vous devez connecter le câble USB à l'Arduino pour la programmation, vous DEVEZ déconnecter l'alimentation entre la batterie et la carte Arduino en retirant un câble de la broche Vin. La carte Arduino ne doit pas être alimentée par deux sources d'alimentation simultanément.
Code Arduino
Étapes rapides
- Installez la bibliothèque DIYables_IRcontroller sur Arduino IDE en suivant cette instruction
- Réalisez le câblage comme le montre le schéma ci-dessus.
- Déconnectez le fil de la broche Vin sur l'Arduino car nous alimenterons l'Arduino via un câble USB lors du téléchargement du code.
- Retournez la voiture à l'envers de sorte que les roues soient en haut.
- Connectez l'Arduino à votre ordinateur à l'aide du câble USB.
- Copiez le code fourni et ouvrez-le dans l'Arduino IDE.
- Cliquez sur le bouton Upload dans l'Arduino IDE pour transférer le code à l'Arduino.
- Utilisez la télécommande IR pour faire avancer, reculer, tourner à gauche, à droite ou arrêter la voiture.
- Vérifiez si les roues se déplacent correctement selon vos commandes.
- Si les roues se déplacent dans le mauvais sens, inversez les fils du moteur à courant continu sur le module L298N.
- Vous pouvez également voir les résultats sur le moniteur série dans l'Arduino IDE.
- Si tout fonctionne correctement, déconnectez le câble USB de l'Arduino, et rebranchez le fil sur la broche Vin pour alimenter l'Arduino depuis la batterie.
- Retournez la voiture en position normale avec les roues sur le sol.
- Amusez-vous à contrôler la voiture !
Explication du code
Vous pouvez trouver l'explication dans la ligne de commentaires du code Arduino ci-dessus.
Vous pouvez en apprendre davantage sur le code en consultant les tutoriels suivants :
- Arduino - Télécommande IR. tutorial
- Arduino - Moteur à courant continu. tutorial
Vous pouvez étendre ce projet en :
- Ajout de capteurs d'évitement d'obstacles pour arrêter immédiatement la voiture si un obstacle est détecté.
- Ajout d'une fonction pour contrôler la vitesse de la voiture (voir le tutoriel Arduino - Moteur à courant continu.). Le code fourni contrôle la voiture à pleine vitesse.