Arduino - Interrupteur de fin de course
L'interrupteur de fin de course est utilisé dans de nombreuses applications telles que le contrôle des moteurs, l'automatisation. Dans ce tutoriel, nous apprendrons comment utiliser l'interrupteur de fin de course avec Arduino.
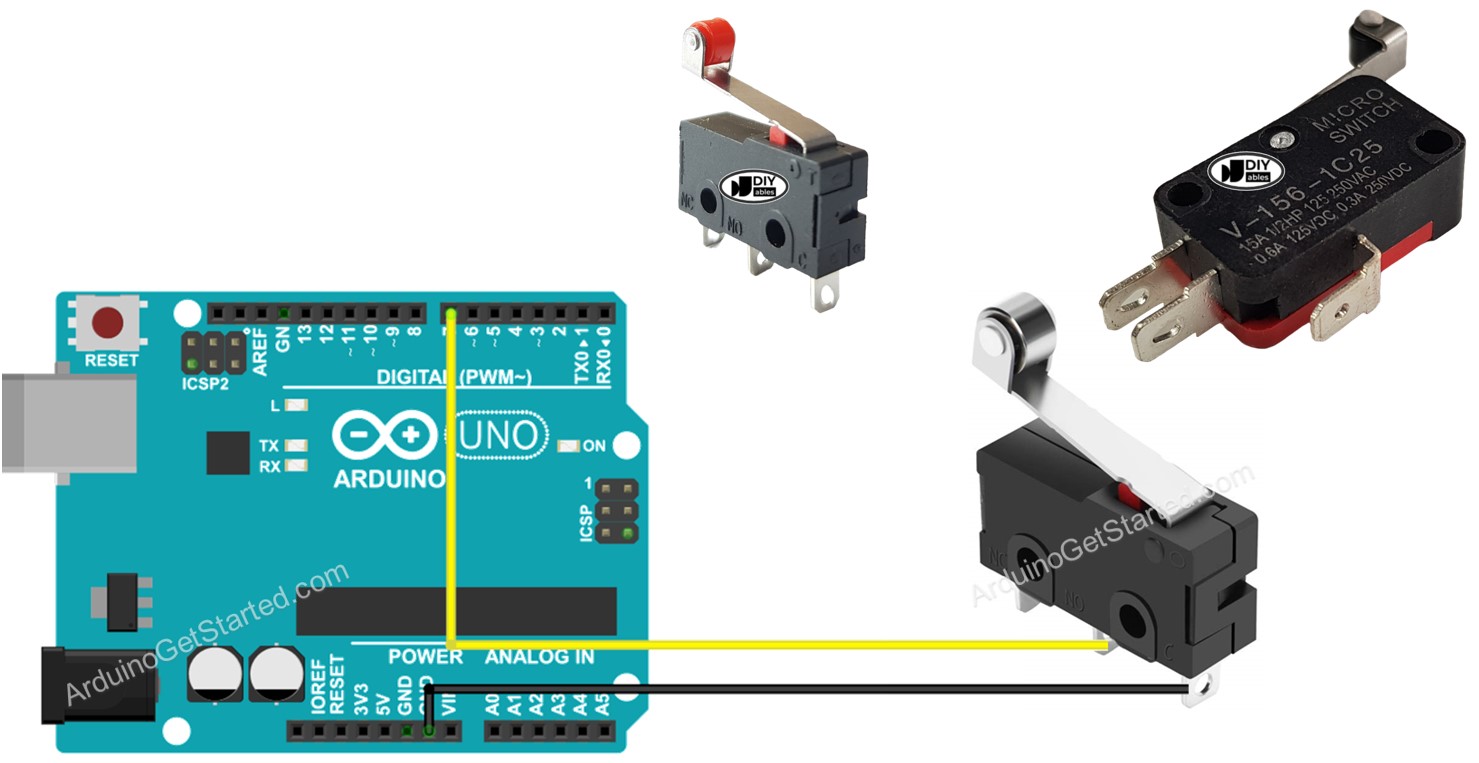
Veuillez ne pas confondre avec ce qui suit :
Préparation du matériel
Ou vous pouvez acheter les kits suivants:
| 1 | × | Kit de Démarrage DIYables STEM V3 (Arduino inclus) | |
| 1 | × | Kit de Capteurs DIYables (18 capteurs/écrans) |
À propos de l'interrupteur de fin de course
Il est appelé Interrupteur de fin de course parce que sa fonction principale est utilisée pour détecter l'objet en mouvement atteignant une limite.
Brochage
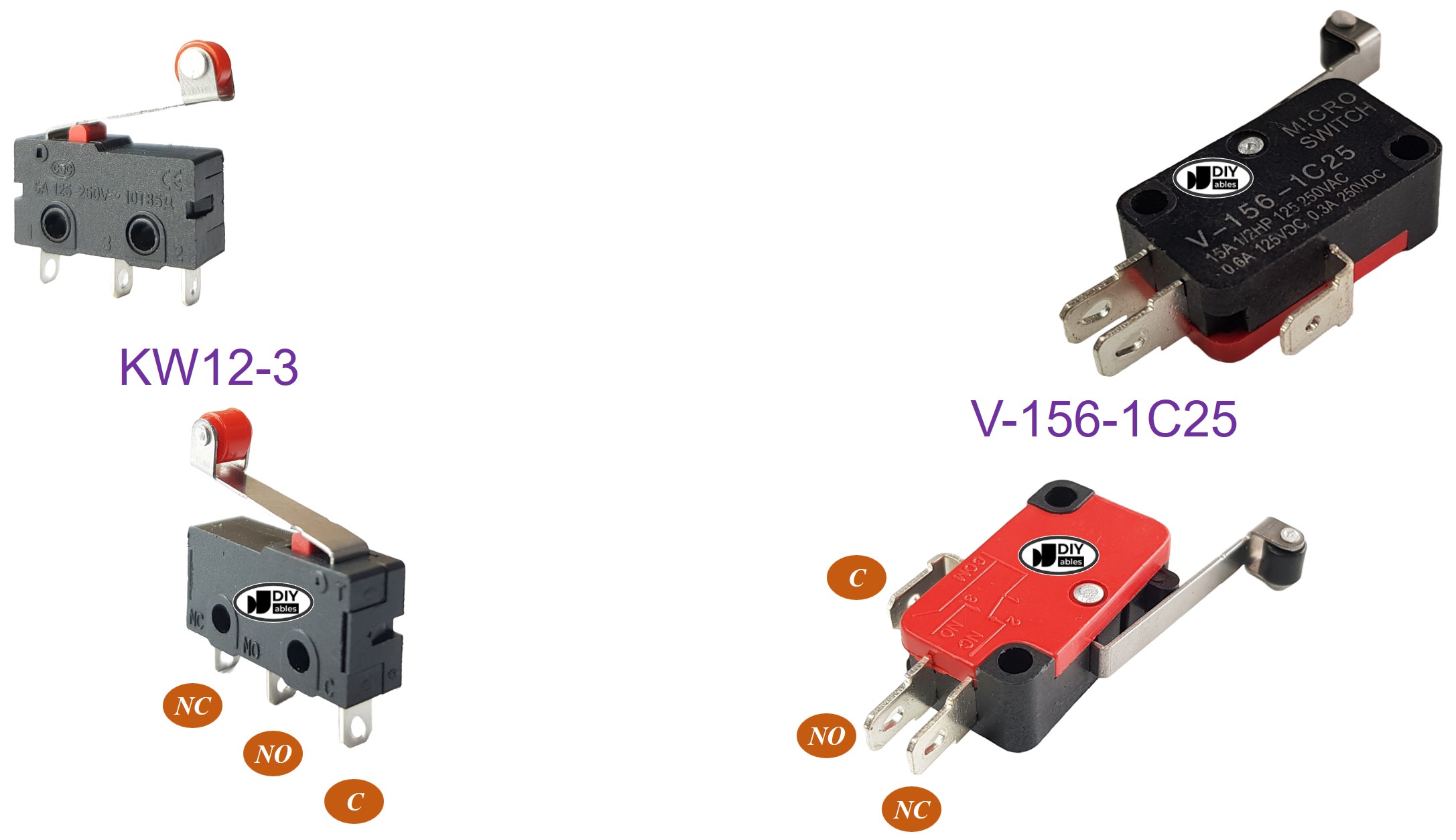
Il existe différents types d'interrupteurs de limite disponibles, mais parmi les plus utilisés figurent le KW12-3 et le V-156-1C25. Ces deux types possèdent 3 broches :
- Broche C : est la broche commune. Elle est utilisée à la fois en mode normalement ouvert et en mode normalement fermé.
- Broche NO : est la broche normalement ouverte. Elle est utilisée en mode normalement ouvert.
- Broche NC : est la broche normalement fermée. Elle est utilisée en mode normalement fermé.
Comment ça fonctionne
Bien que l'interrupteur de fin de course dispose de 3 broches, une application normale utilise généralement seulement deux broches : la broche C et l'une des deux broches restantes. Par conséquent, il existe quatre manières d'utiliser l'interrupteur de fin de course. Ci-dessous se trouve le tableau de câblage pour l'interrupteur de fin de course et l'état de lecture sur Arduino dans les quatre manières :
| C pin | NO pin | NC pin | Arduino Input Pin's State | |
|---|---|---|---|---|
| 1 | GND | Arduino Input Pin (with pull-up) | not connected | HIGH when untouched, LOW when touched |
| 2 | GND | not connected | Arduino Input Pin (with pull-up) | LOW when untouched, HIGH when touched |
| 3 | VCC | Arduino Input Pin (with pull-down) | not connected | LOW when untouched, HIGH when touched |
| 4 | VCC | not connected | Arduino Input Pin (with pull-down) | HIGH when untouched, LOW when touched |
Pour chaque méthode, nous pouvons interchanger la broche GND et la broche d'entrée Arduino. Par conséquent, nous avons 8 façons de connecter un Arduino à un interrupteur de fin de course.
Nous avons seulement besoin de choisir une des quatre méthodes ci-dessus. Le reste du tutoriel utilisera la première méthode.
Diagramme de câblage
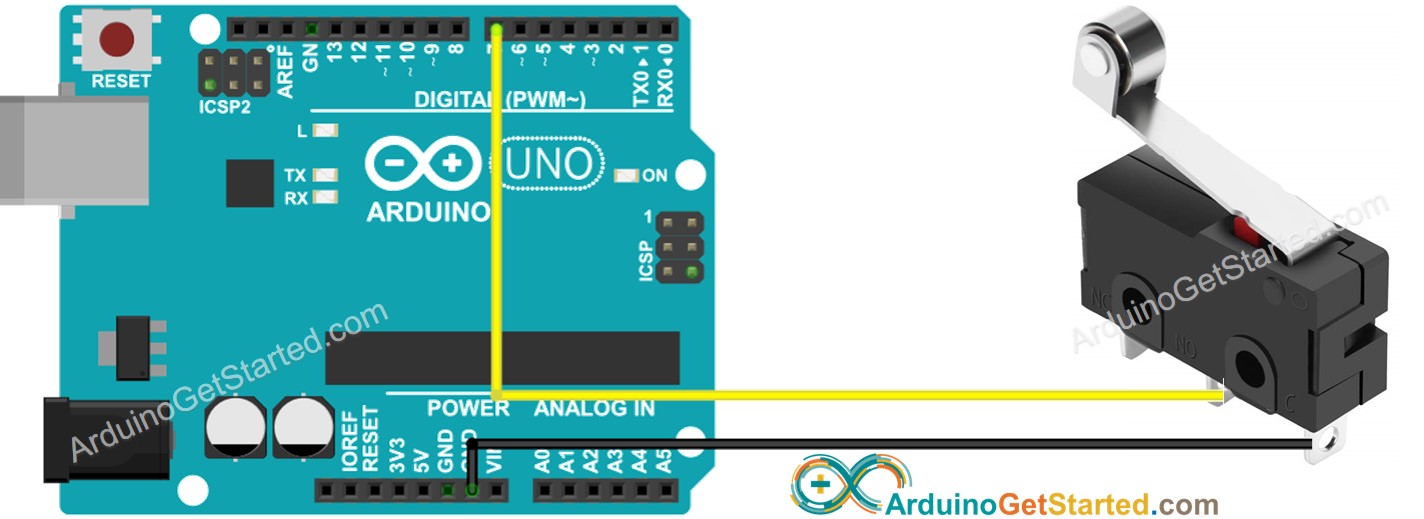
Cette image a été créée avec Fritzing. Cliquez pour agrandir l'image.
Pour rendre la connexion des câbles stable et solide, nous recommandons d’utiliser un fer à souder pour souder ensemble les fils et la broche de l'interrupteur de fin de course, puis d’utiliser une gaine thermorétractable pour assurer la sécurité.
Code Arduino - Interrupteur de limite
Tout comme un bouton, un interrupteur de fin de course doit également être anti-rebond (voir plus à Pourquoi a-t-on besoin de l'anti-rebond pour le bouton/l'interrupteur de fin de course ?). L'anti-rebond rend le code compliqué. Heureusement, la bibliothèque ezButton prend en charge la fonction d'anti-rebond, La bibliothèque utilise également un registre de pull-up interne. Cela nous facilite la programmation.
※ Note:
Il existe deux cas d'utilisation fréquemment utilisés :
- Le premier : Si l'état de l'interrupteur est TOUCHÉ, faire quelque chose. Si l'état d'entrée est NON TOUCHÉ, faire autre chose en sens inverse.
- Le deuxième : Si l'état de l'interrupteur passe de NON TOUCHÉ à TOUCHÉ (ou de TOUCHÉ à NON TOUCHÉ), faire quelque chose.
Étapes rapides
- Faites le câblage comme le montre le schéma de câblage ci-dessus
- Connectez l'Arduino au PC via un câble USB
- Ouvrez l'IDE Arduino
- Installez la bibliothèque ezButton. Voir Comment faire
- Sélectionnez la bonne carte et le bon port
- Cliquez sur le bouton Upload de l'IDE Arduino pour téléverser le code sur l'Arduino
- Touchez l'interrupteur de fin de course et relâchez.
- Consultez le résultat sur le moniteur série.