Arduino - Encodeur Rotatif - Moteur Servo
Dans ce tutoriel, nous allons apprendre à programmer un Arduino pour faire tourner un moteur servo en fonction de la valeur de sortie de l'encodeur rotatif.
Préparation du matériel
Ou vous pouvez acheter les kits suivants:
| 1 | × | Kit de Démarrage DIYables STEM V3 (Arduino inclus) | |
| 1 | × | Kit de Capteurs DIYables (18 capteurs/écrans) |
Divulgation : Certains des liens fournis dans cette section sont des liens affiliés Amazon. Nous pouvons recevoir une commission pour tout achat effectué via ces liens, sans coût supplémentaire pour vous. Nous vous remercions de votre soutien.
Note d'achat: Si vous utilisez plusieurs servomoteurs, nous recommandons d'utiliser le PCA9685 16 Channel PWM Servo Driver Module pour économiser les broches du MCU et faciliter le câblage.
À propos du moteur servo et de l'encodeur rotatif
Si vous ne connaissez pas le moteur servo et le codeur rotatif (brochage, fonctionnement, programmation...), renseignez-vous sur ces derniers dans les tutoriels suivants :
Diagramme de câblage
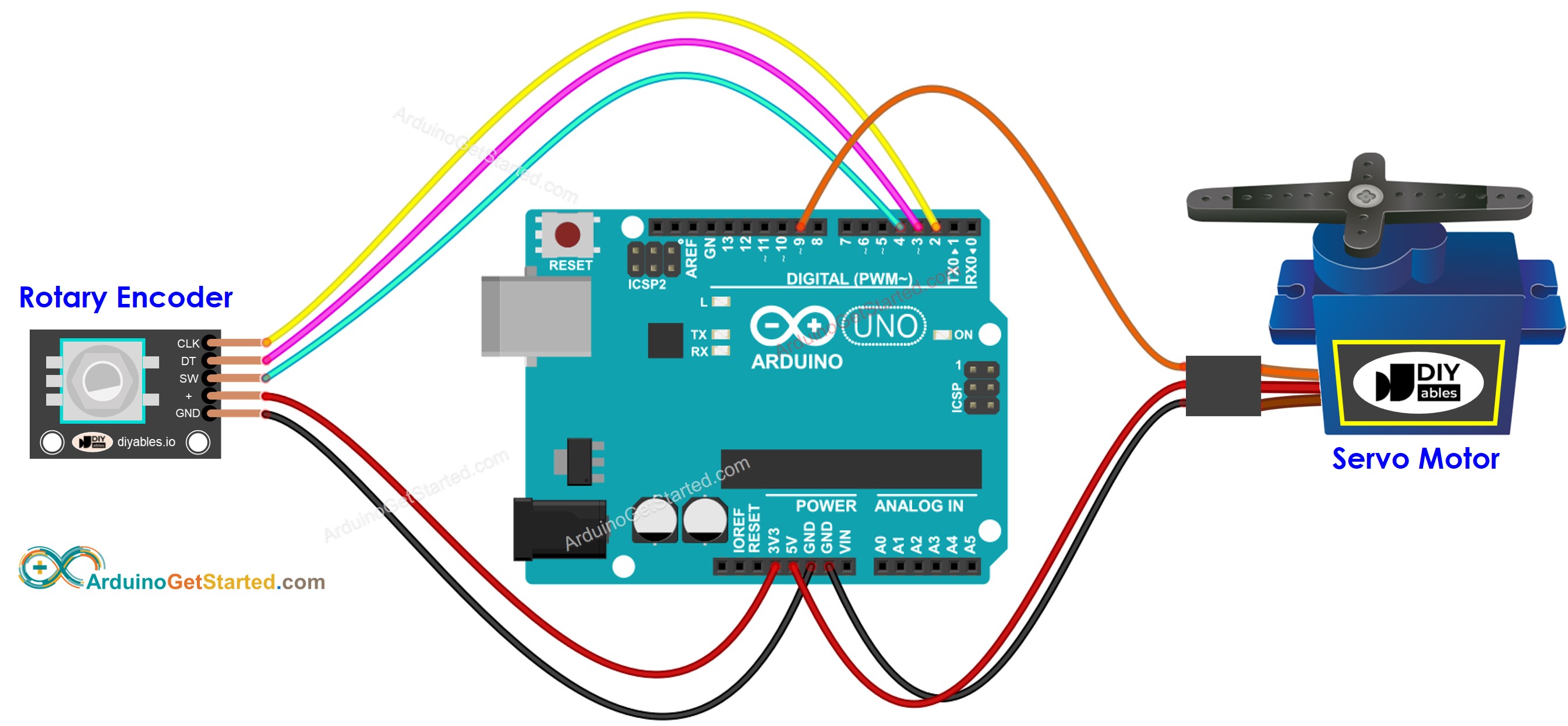
Cette image a été créée avec Fritzing. Cliquez pour agrandir l'image.
Code Arduino
/*
* Ce code Arduino a été développé par newbiely.fr
* Ce code Arduino est mis à disposition du public sans aucune restriction.
* Pour des instructions complètes et des schémas de câblage, veuillez visiter:
* https://newbiely.fr/tutorials/arduino/arduino-rotary-encoder-servo-motor
*/
#include <Servo.h>
#define CLK_PIN 2
#define DT_PIN 3
#define SW_PIN 4
#define SERVO_PIN 9
#define DIRECTION_CW 0 // clockwise direction
#define DIRECTION_CCW 1 // counter-clockwise direction
int counter = 0;
int direction = DIRECTION_CW;
int CLK_state;
int prev_CLK_state;
Servo servo; // create servo object to control a servo
void setup() {
Serial.begin(9600);
// configure encoder pins as inputs
pinMode(CLK_PIN, INPUT);
pinMode(DT_PIN, INPUT);
// read the initial state of the rotary encoder's CLK pin
prev_CLK_state = digitalRead(CLK_PIN);
servo.attach(SERVO_PIN); // attaches the servo on pin 9 to the servo object
servo.write(0);
}
void loop() {
// read the current state of the rotary encoder's CLK pin
CLK_state = digitalRead(CLK_PIN);
// If the state of CLK is changed, then pulse occurred
// React to only the rising edge (from LOW to HIGH) to avoid double count
if (CLK_state != prev_CLK_state && CLK_state == HIGH) {
// if the DT state is HIGH
// the encoder is rotating in counter-clockwise direction => decrease the counter
if (digitalRead(DT_PIN) == HIGH) {
counter--;
direction = DIRECTION_CCW;
} else {
// the encoder is rotating in clockwise direction => increase the counter
counter++;
direction = DIRECTION_CW;
}
Serial.print("DIRECTION: ");
if (direction == DIRECTION_CW)
Serial.print("Clockwise");
else
Serial.print("Counter-clockwise");
Serial.print(" | COUNTER: ");
Serial.println(counter);
if (counter < 0)
counter = 0;
else if (counter > 180)
counter = 180;
// sets the servo angle according to the counter
servo.write(counter);
}
// save last CLK state
prev_CLK_state = CLK_state;
}
Étapes rapides
- Connectez l'Arduino au PC via le câble USB
- Ouvrez l'IDE Arduino, sélectionnez la bonne carte et le bon port
- Copiez le code ci-dessus et ouvrez-le avec l'IDE Arduino
- Cliquez sur le bouton Upload sur l'IDE Arduino pour téléverser le code sur l'Arduino

- Ouvrez le moniteur série
- Tournez l'encodeur rotatif
- Observez la rotation du moteur servo
- Consultez le résultat sur le moniteur série
8
Serial.println("Hello World!");
Message (Enter to send message to 'Arduino Uno' on 'COM15')
New Line
9600 baud
DIRECTION: Clockwise | COUNTER/ANGLE: 19
DIRECTION: Clockwise | COUNTER/ANGLE: 26
DIRECTION: Clockwise | COUNTER/ANGLE: 34
DIRECTION: Clockwise | COUNTER/ANGLE: 46
DIRECTION: Clockwise | COUNTER/ANGLE: 53
DIRECTION: Counter-clockwise | COUNTER/ANGLE: 46
DIRECTION: Counter-clockwise | COUNTER/ANGLE: 34
DIRECTION: Counter-clockwise | COUNTER/ANGLE: 26
DIRECTION: Counter-clockwise | COUNTER/ANGLE: 16
DIRECTION: Counter-clockwise | COUNTER/ANGLE: 06
Explication du code
Lisez l'explication ligne par ligne dans les lignes de commentaire du code source !