Arduino - Joystick - Moteur Servo
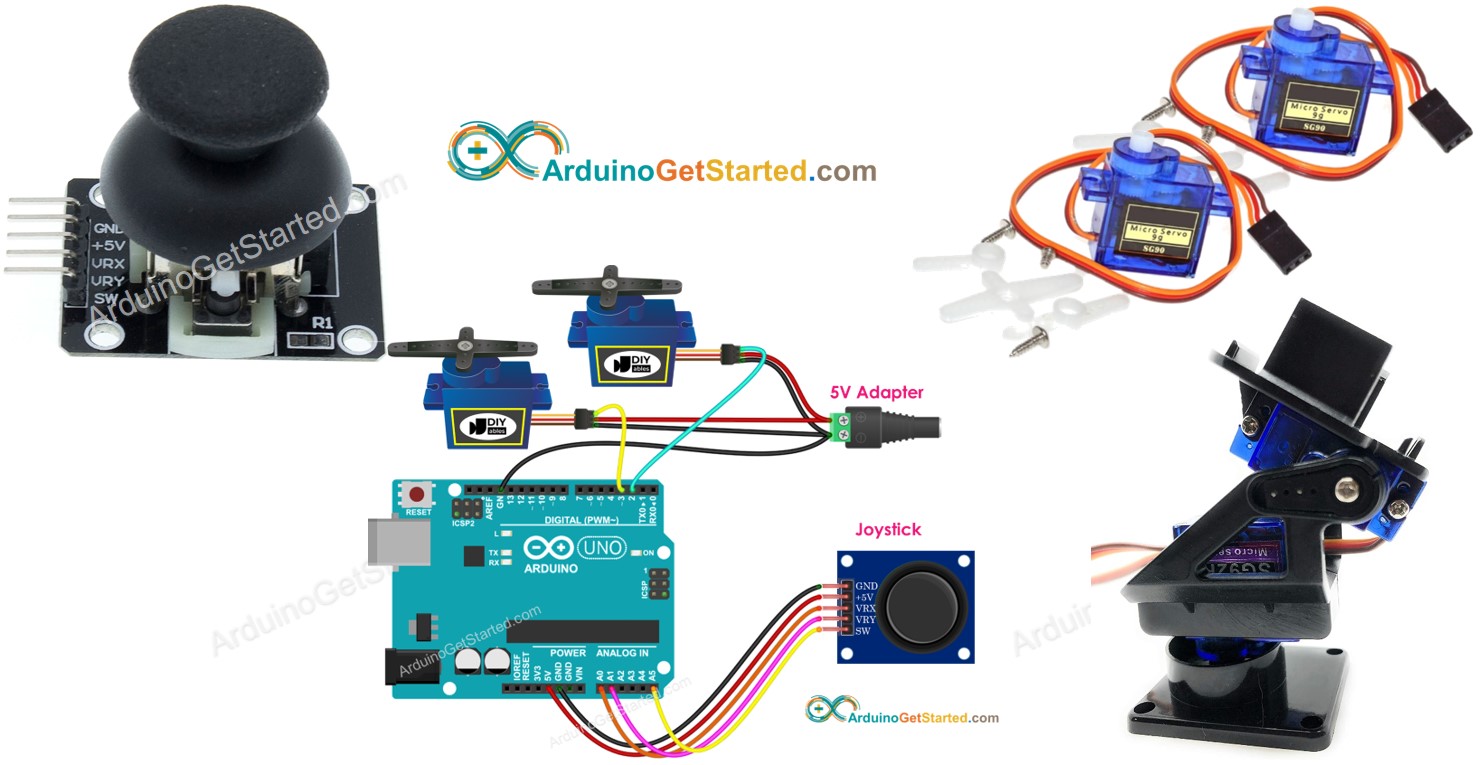
Dans ce tutoriel, nous allons apprendre à utiliser un Arduino et un joystick pour contrôler deux moteurs servo ou un kit pan-tilt avec des servos.
Un joystick possède deux potentiomètres intégrés disposés perpendiculairement l'un à l'autre (appelés axe X et axe Y). Ces potentiomètres délivrent des valeurs analogiques (appelées valeur X et valeur Y) sur les broches VRX et VRY. Nous utiliserons ces valeurs analogiques pour contrôler deux moteurs servo de manière indépendante : la valeur X contrôle le servo #1 et la valeur Y contrôle le servo #2. Dans le cas du kit pan-tilt, le mouvement des deux moteurs servo crée un mouvement en 3-D.
Il y a deux cas d'utilisation d'application :
- Cas d'utilisation 1 : Les moteurs servo tournent en fonction du mouvement du pouce du joystick :
- Les angles des moteurs servo sont proportionnels aux valeurs de l'axe X et de l'axe Y du joystick.
- Lorsque nous relâchons le pouce du joystick ⇒ toutes les valeurs reviennent aux valeurs centrales ⇒ les moteurs servo retournent automatiquement à la position centrale
- Cas d'utilisation 2 : utiliser le joystick pour commander les moteurs servo (commandes haut/bas/gauche/droite)
- Lorsque le pouce du joystick est poussé vers la gauche, déplacer le moteur servo #1 dans le sens des aiguilles d'une montre pas à pas
- Lorsque le pouce du joystick est poussé vers la droite, déplacer le moteur servo #1 dans le sens contraire des aiguilles d'une montre pas à pas
- Lorsque le pouce du joystick est poussé vers le haut, déplacer le moteur servo #2 dans le sens des aiguilles d'une montre pas à pas
- Lorsque le pouce du joystick est poussé vers le bas, déplacer le moteur servo #2 dans le sens contraire des aiguilles d'une montre pas à pas
- Lorsque nous relâchons le pouce du joystick ⇒ les moteurs servo ne reviennent pas à la position centrale
- Si le joystick est pressé (bouton poussoir), les moteurs servo reviendront à la position centrale
- Connectez l'Arduino au PC via le câble USB
- Ouvrez l'IDE Arduino, sélectionnez la bonne carte et le bon port
- Copiez le code ci-dessus et ouvrez-le avec l'IDE Arduino
- Cliquez sur le bouton Upload sur l'IDE Arduino pour charger le code sur l'Arduino
- Ouvrez le moniteur série
- Poussez le joystick dans une direction
- Observez la rotation du moteur servo
- Consultez le résultat sur le moniteur série
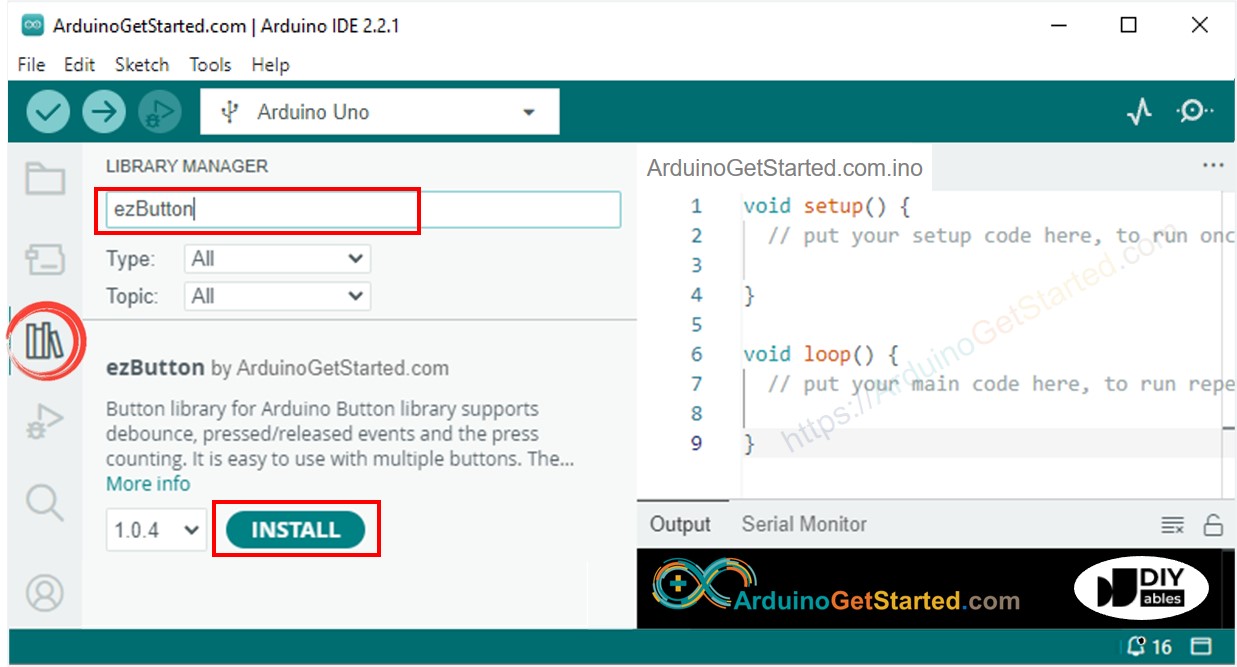
- Naviguez jusqu'à l'icône Libraries sur la barre latérale gauche de l'IDE Arduino.
- Recherchez "ezButton", puis trouvez la bibliothèque de boutons par ArduinoGetStarted.com
- Cliquez sur le bouton Install pour installer la bibliothèque ezButton.
- Copiez le code ci-dessus et ouvrez-le avec l'IDE Arduino
- Cliquez sur le bouton Upload dans l'IDE Arduino pour charger le code sur Arduino
- Ouvrez le moniteur série
- Poussez le joystick dans une direction
- Observez la rotation du moteur servo
- Consultez le résultat sur le moniteur série
Nous explorerons le code pour les deux cas d'utilisation dans les prochaines parties.
Préparation du matériel
Ou vous pouvez acheter les kits suivants:
| 1 | × | Kit de Démarrage DIYables STEM V3 (Arduino inclus) | |
| 1 | × | Kit de Capteurs DIYables (18 capteurs/écrans) |
Note d'achat: Si vous utilisez plusieurs servomoteurs, nous recommandons d'utiliser le PCA9685 16 Channel PWM Servo Driver Module pour économiser les broches du MCU et faciliter le câblage.
À propos du joystick et du moteur servo
Si vous ne connaissez pas le joystick et le moteur servo (brochage, fonctionnement, programmation...), renseignez-vous à leur sujet dans les tutoriels suivants :
Diagramme de câblage
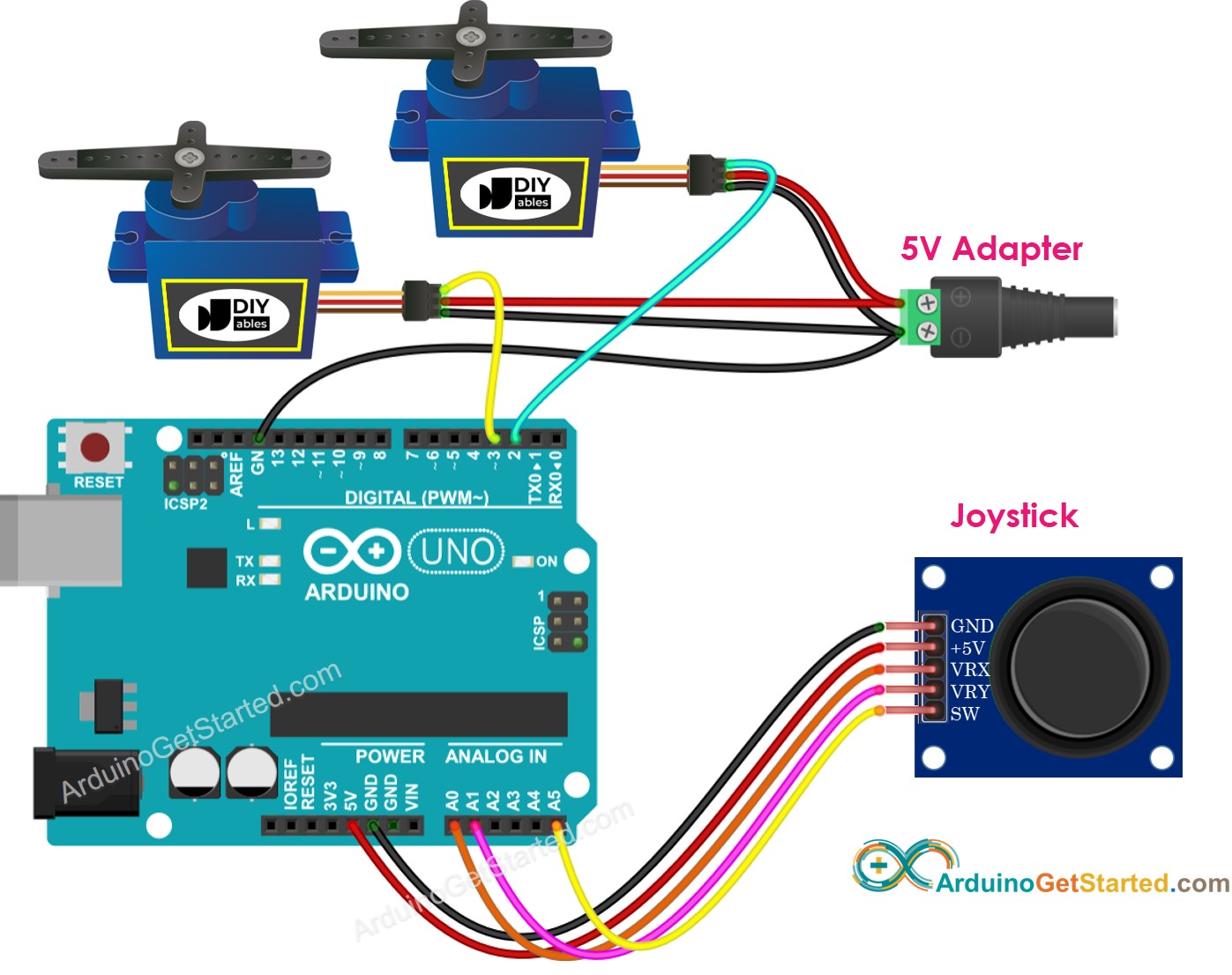
Cette image a été créée avec Fritzing. Cliquez pour agrandir l'image.
Code Arduino
Code Arduino - Les moteurs servo tournent en fonction du mouvement du pouce du joystick
Étapes rapides

Code Arduino - Utiliser le joystick pour commander les moteurs servo
Étapes rapides
Explication du code
Lisez l'explication ligne par ligne dans les lignes de commentaire du code source !