Arduino - Moteur servo contrôlé par potentiomètre
Dans Arduino - Potentiomètre déclenche moteur servo., nous avons appris comment un potentiomètre active un moteur servo. Dans ce tutoriel, nous allons apprendre à faire tourner un moteur servo en fonction de la valeur de sortie du potentiomètre.
Préparation du matériel
Ou vous pouvez acheter les kits suivants:
| 1 | × | Kit de Démarrage DIYables STEM V3 (Arduino inclus) | |
| 1 | × | Kit de Capteurs DIYables (18 capteurs/écrans) |
Note d'achat: Si vous utilisez plusieurs servomoteurs, nous recommandons d'utiliser le PCA9685 16 Channel PWM Servo Driver Module pour économiser les broches du MCU et faciliter le câblage.
À propos du servomoteur et du potentiomètre
Si vous ne connaissez pas le moteur servo et le potentiomètre (brochage, fonctionnement, programmation...), renseignez-vous sur ces sujets dans les tutoriels suivants :
Diagramme de câblage
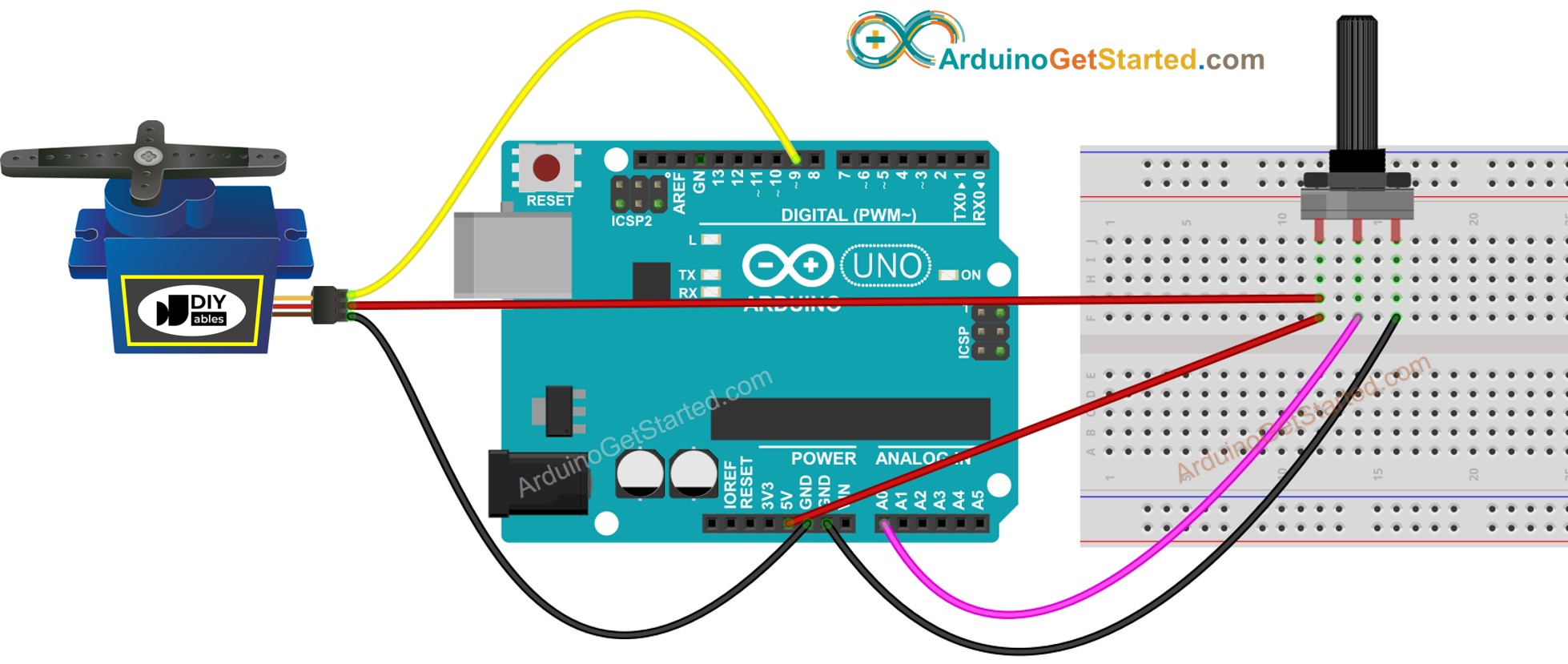
Cette image a été créée avec Fritzing. Cliquez pour agrandir l'image.
Comment programmer
- Lit la valeur du potentiomètre (valeur entre 0 et 1023)
- échelle à un angle (valeur entre 0 et 180)
- Définit la position du servo en fonction de l'angle
Code Arduino
Étapes rapides
- Connectez l'Arduino au PC via le câble USB
- Ouvrez l'IDE Arduino, sélectionnez la bonne carte et le bon port
- Copiez le code ci-dessus et ouvrez-le avec l'IDE Arduino
- Cliquez sur le bouton Upload de l'IDE Arduino pour charger le code sur l'Arduino

- Ouvrir le moniteur série
- Tourner le potentiomètre
- Observer la rotation du moteur servo
- Voir le résultat sur le moniteur série
Explication du code
Lisez l'explication ligne par ligne dans les lignes de commentaire du code source!