ESP32 - Moteur servo
Ce tutoriel vous explique comment utiliser ESP32 pour contrôler un moteur servo.
Préparation du matériel
Ou vous pouvez acheter les kits suivants:
| 1 | × | Kit de Démarrage DIYables ESP32 (ESP32 inclus) | |
| 1 | × | Kit de Capteurs DIYables (18 capteurs/écrans) |
Note d'achat: Si vous utilisez plusieurs servomoteurs, nous recommandons d'utiliser le PCA9685 16 Channel PWM Servo Driver Module pour économiser les broches du MCU et faciliter le câblage.
À propos du servomoteur
Le servo-moteur standard est un moteur qui peut tourner entre 0° et 180°.
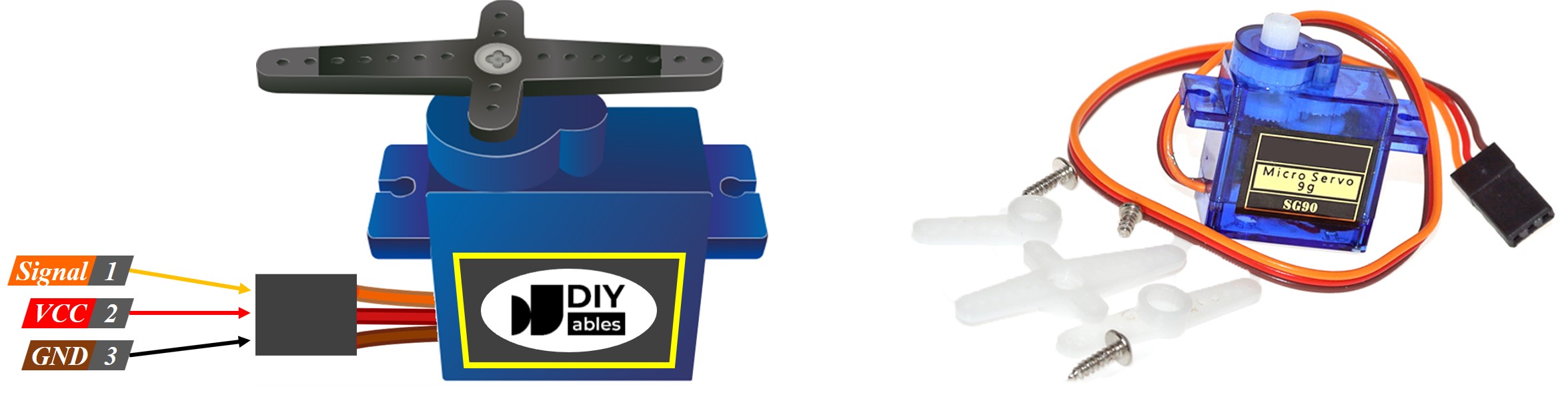
Brochage du servomoteur
Le servo-moteur a trois broches :
- Broche GND : (marron ou noir) connectez cette broche à GND (0V)
- Broche VCC : (rouge) connectez cette broche à VCC (5V)
- Broche de signal : (jaune ou orange) reçoit le signal de contrôle PWM à partir d'une broche d'ESP32.
Fonctionnement du moteur servo
Schéma de câblage entre le moteur servo et l'ESP32
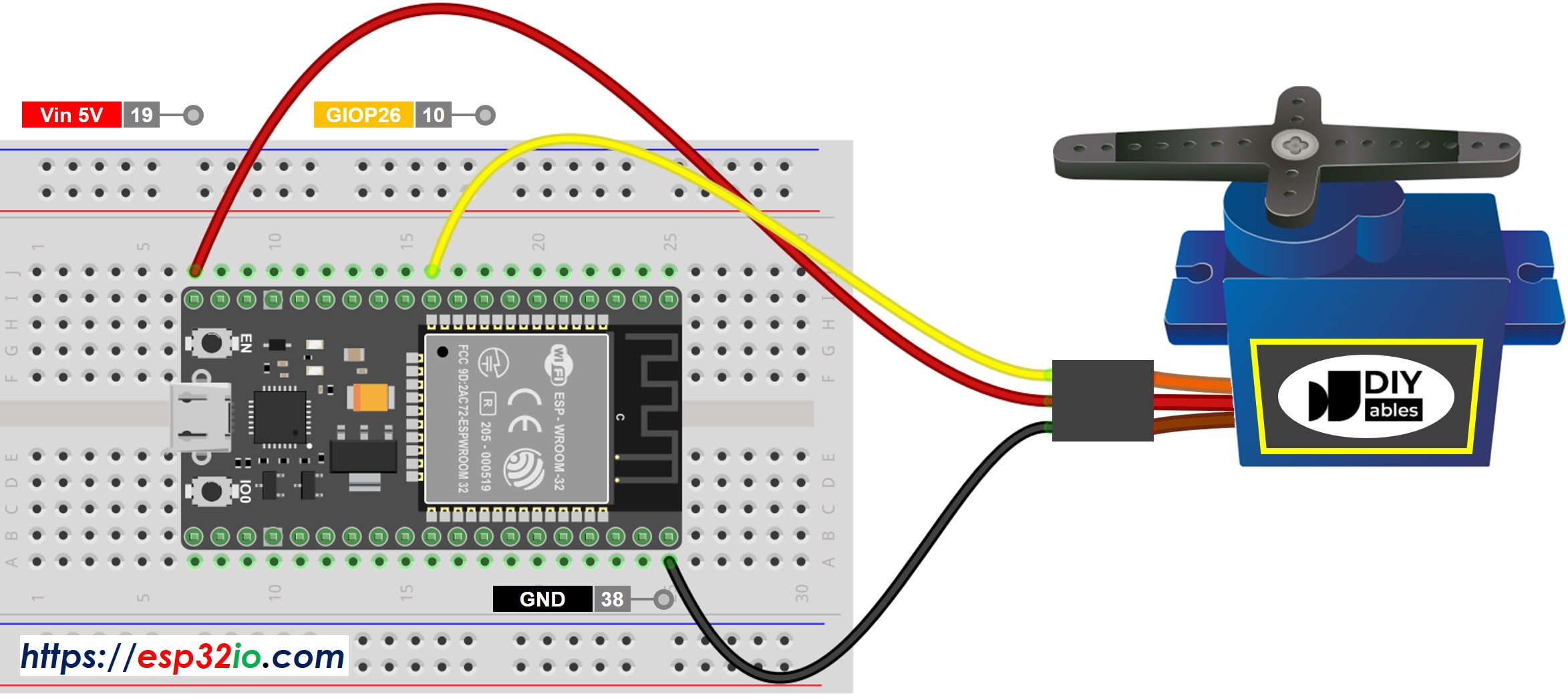
Cette image a été créée avec Fritzing. Cliquez pour agrandir l'image.
Si vous ne savez pas comment alimenter l'ESP32 et d'autres composants, consultez les instructions dans le tutoriel suivant : Comment alimenter l'ESP32..
Pour des raisons de simplicité, le schéma de câblage ci-dessus est utilisé à des fins de test ou d'apprentissage, et pour un servo-moteur à faible couple. En pratique, nous recommandons vivement d'utiliser une alimentation externe pour le servo-moteur. Le schéma de câblage ci-dessous montre comment connecter le servo-moteur à une source d'alimentation externe.
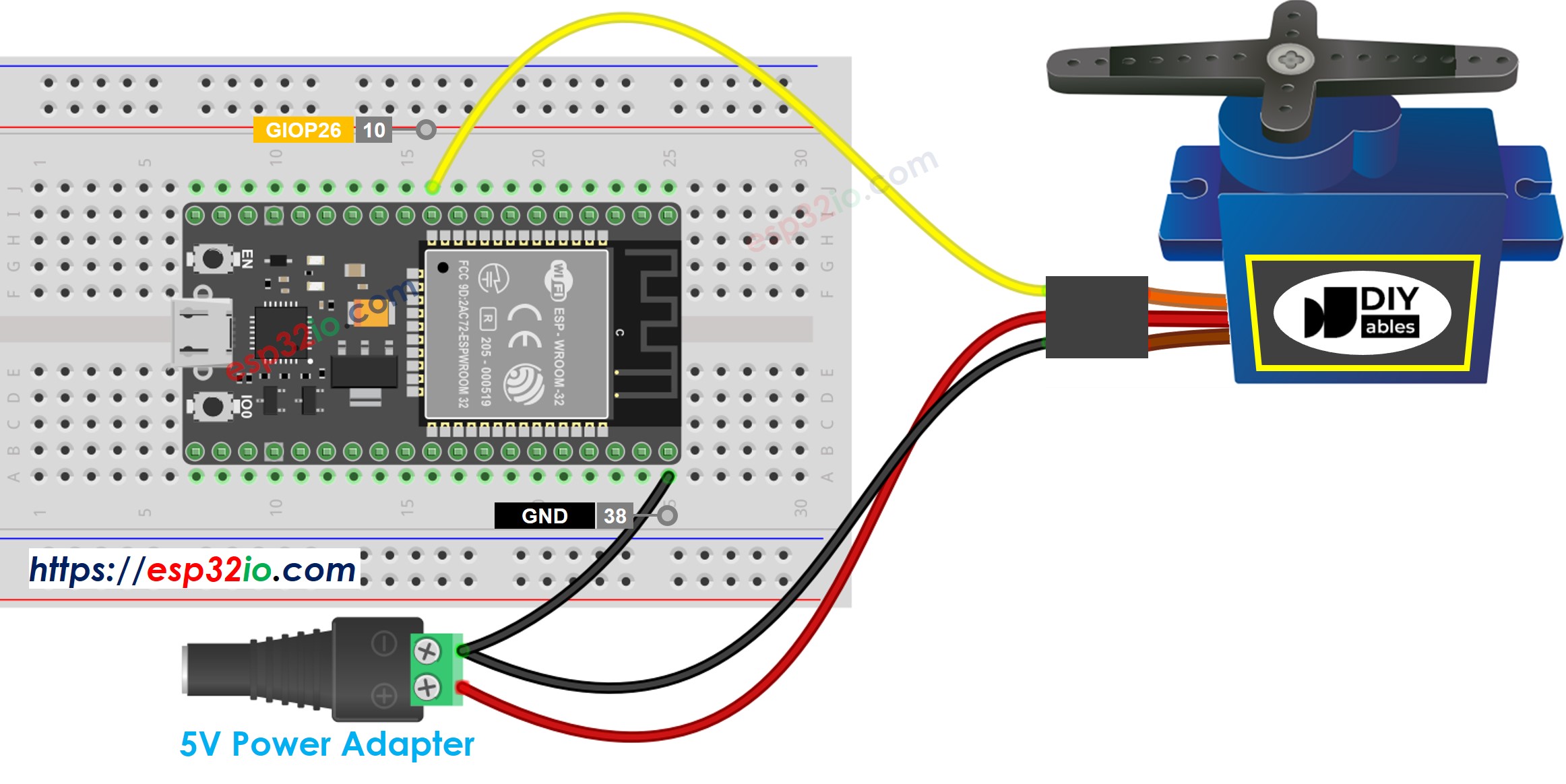
Cette image a été créée avec Fritzing. Cliquez pour agrandir l'image.
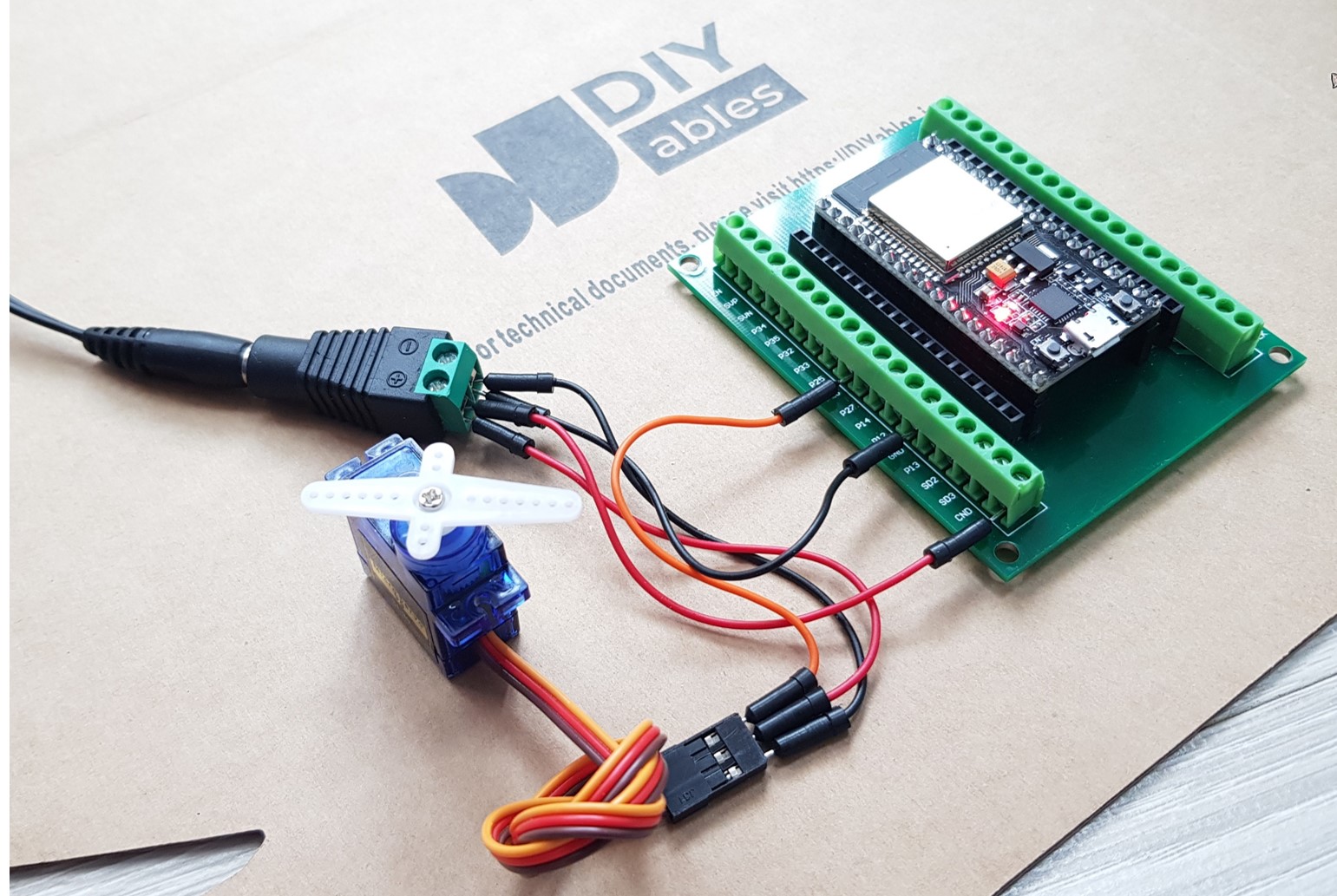
Le schéma ci-dessous montre un câblage réel entre un servo-moteur et un ESP32.
Code ESP32
Étapes rapides
- Si c'est la première fois que vous utilisez ESP32, consultez Installation du logiciel ESP32..
- Faites le câblage comme sur l'image ci-dessus.
- Connectez la carte ESP32 à votre PC via un câble micro USB.
- Ouvrez Arduino IDE sur votre PC.
- Sélectionnez la bonne carte ESP32 (par exemple, Module de développement ESP32) et le port COM.
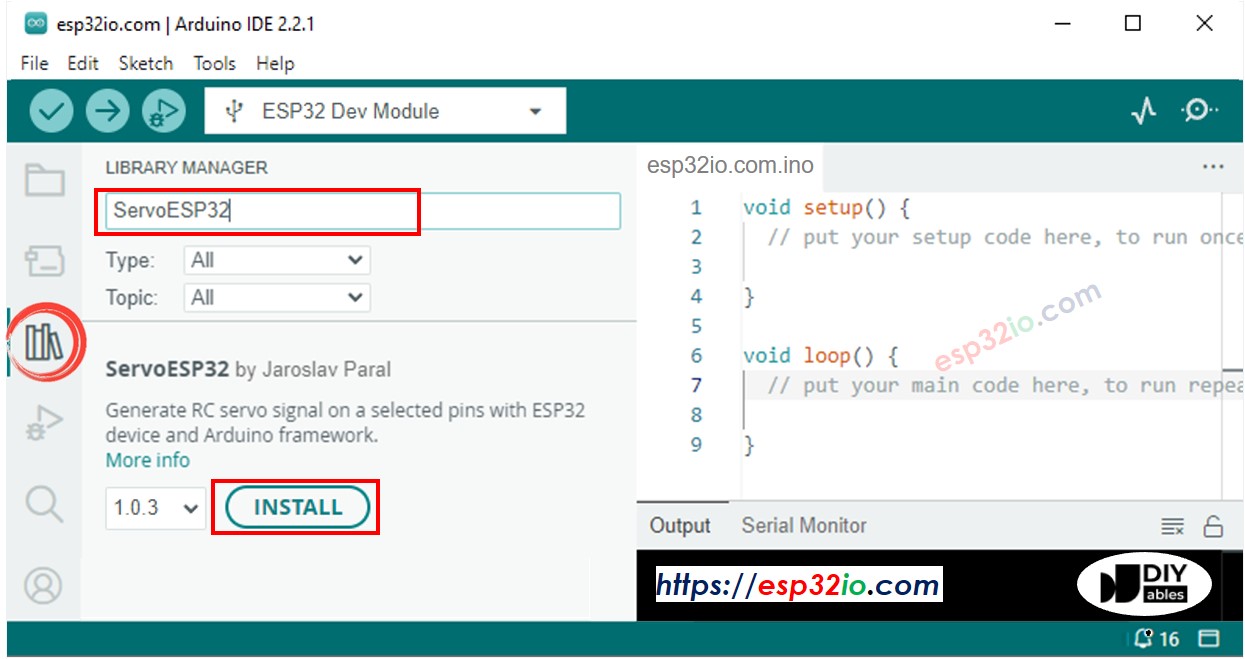
- Cliquez sur l'icône Libraries dans la barre gauche de l'Arduino IDE.
- Tapez ESP32Servo dans la boîte de recherche, puis recherchez la bibliothèque servo de Kevin Harrington,John K. Bennett.
- Cliquez sur le bouton Install pour installer la bibliothèque du moteur servo pour ESP32.
- Copiez le code ci-dessus et collez-le dans l'IDE Arduino.
- Compilez et téléchargez le code sur la carte ESP32 en cliquant sur le bouton Upload dans l'IDE Arduino.

- Voyez le résultat : le moteur servo tourne lentement d'environ 180° dans les directions horaire et antihoraire.
Explication du code ligne par ligne
Le code ESP32 ci-dessus contient des explications ligne par ligne. Veuillez lire les commentaires dans le code !
Comment contrôler la vitesse d'un servomoteur
Vidéo
Les instructions et le code source pour la vidéo ci-dessus sont disponibles sur le tutoriel ESP32 - Contrôle d'un servomoteur via le Web..