ESP32 - Moteur à courant continu - Interrupteur de fin de course
Dans ce tutoriel ESP32, nous allons apprendre à utiliser un ESP32 pour contrôler un moteur à courant continu à l'aide d'un interrupteur de fin de course et d'un pilote L298N. En détail, nous allons apprendre :
- Comment arrêter un moteur à courant continu lorsqu'un interrupteur de fin de course est touché
- Comment changer la direction d'un moteur à courant continu lorsque un interrupteur de fin de course est touché
- Comment changer la direction d'un moteur à courant continu lorsque deux interrupteurs de fin de course sont touchés
Dans ce tutoriel sur l'ESP32, nous explorerons le processus d'utilisation de l'ESP32 pour gérer un moteur à courant continu à l'aide d'un interrupteur de fin de course et d'un pilote L298N. Plus précisément, nous aborderons les aspects suivants :
- Arrêt du moteur à courant continu lors du contact avec un interrupteur de fin de course
- Changement de direction du moteur à courant continu lors du contact avec un interrupteur de fin de course
- Changement de direction du moteur à courant continu lorsque deux interrupteurs de fin de course sont activés
Préparation du matériel
Ou vous pouvez acheter les kits suivants:
| 1 | × | Kit de Démarrage DIYables ESP32 (ESP32 inclus) | |
| 1 | × | Kit de Capteurs DIYables (18 capteurs/écrans) |
À propos du moteur à courant continu et de l'interrupteur de fin de course
Si vous ne connaissez pas le moteur à courant continu et l'interrupteur de fin de course (brochage, fonctionnement, programmation...), renseignez-vous à leur sujet dans les tutoriels suivants :
- ESP32 - Moteur à courant continu. tutorial
Diagramme de câblage
Ce tutoriel fournit les codes ESP32 pour deux cas : Un moteur CC + un interrupteur de fin de course, Un moteur CC + deux interrupteurs de fin de course.
- Schéma de câblage entre le moteur à courant continu et un interrupteur de fin de course
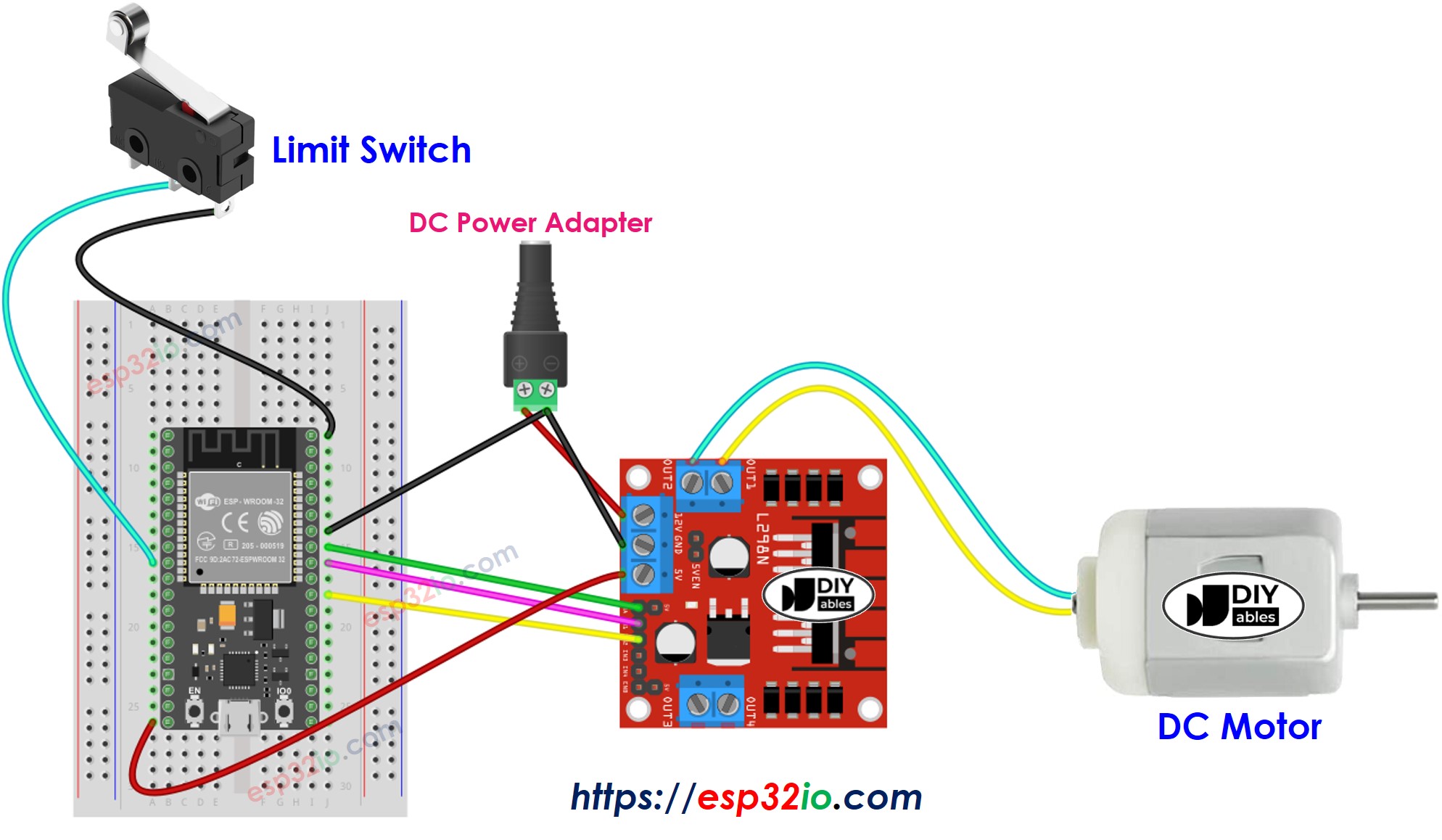
Cette image a été créée avec Fritzing. Cliquez pour agrandir l'image.
Si vous ne savez pas comment alimenter l'ESP32 et d'autres composants, consultez les instructions dans le tutoriel suivant : Comment alimenter l'ESP32..
- Schéma de câblage entre le moteur à courant continu et les deux interrupteurs de fin de course.
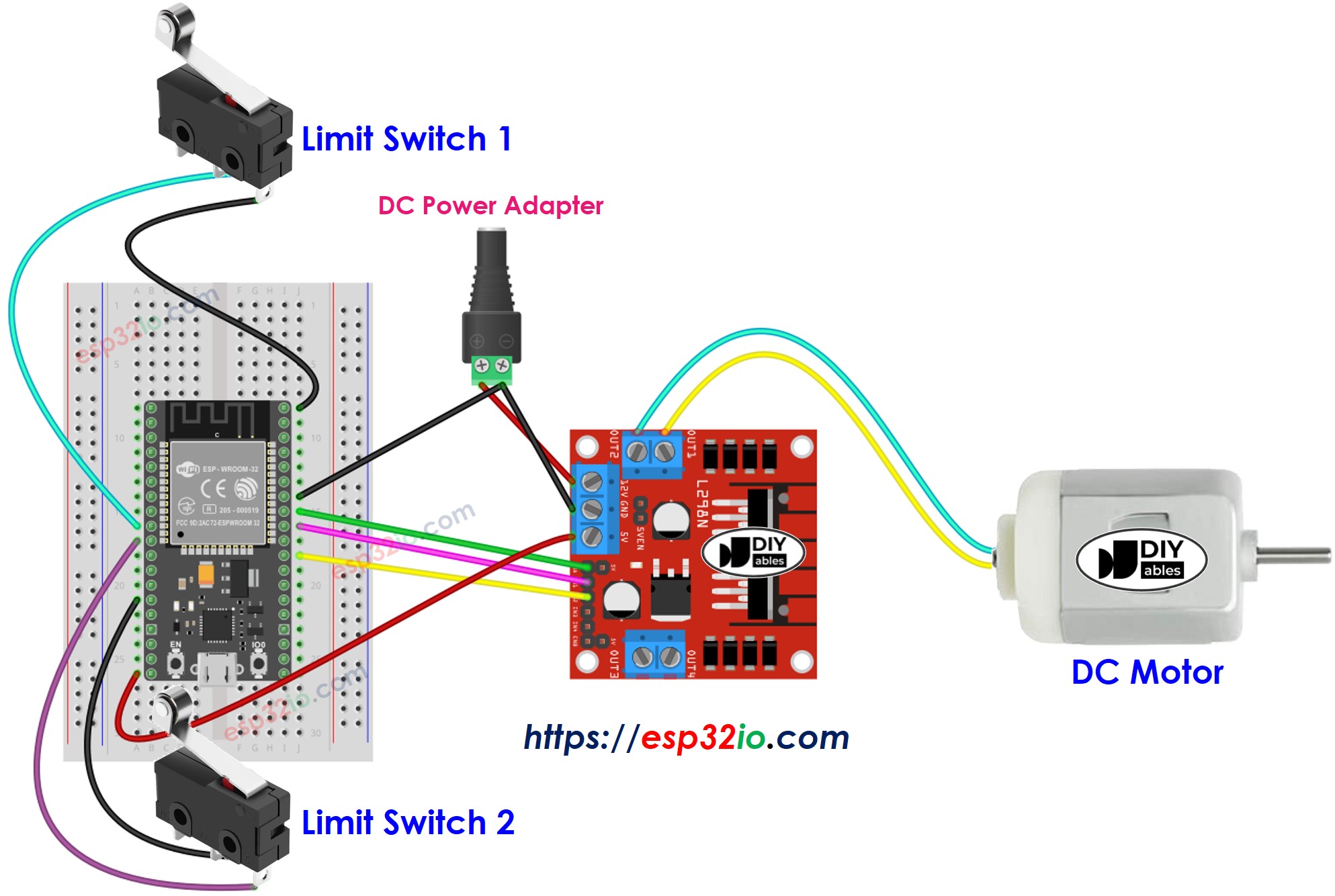
Cette image a été créée avec Fritzing. Cliquez pour agrandir l'image.
Code ESP32 - Arrêter un moteur à courant continu avec un interrupteur de fin de course
Le code ci-dessous fait tourner un moteur à courant continu indéfiniment et s'arrête immédiatement lorsqu'un interrupteur de fin de course est touché.
Étapes rapides
- Si c'est la première fois que vous utilisez ESP32, consultez Installation du logiciel ESP32..
- Effectuez le câblage comme sur l'image ci-dessus.
- Connectez la carte ESP32 à votre PC via un câble micro USB.
- Ouvrez Arduino IDE sur votre PC.
- Sélectionnez la bonne carte ESP32 (par exemple, ESP32 Dev Module) et le port COM.
- Connectez ESP32 au PC via un câble USB.
- Ouvrez Arduino IDE, sélectionnez la bonne carte et le bon port.
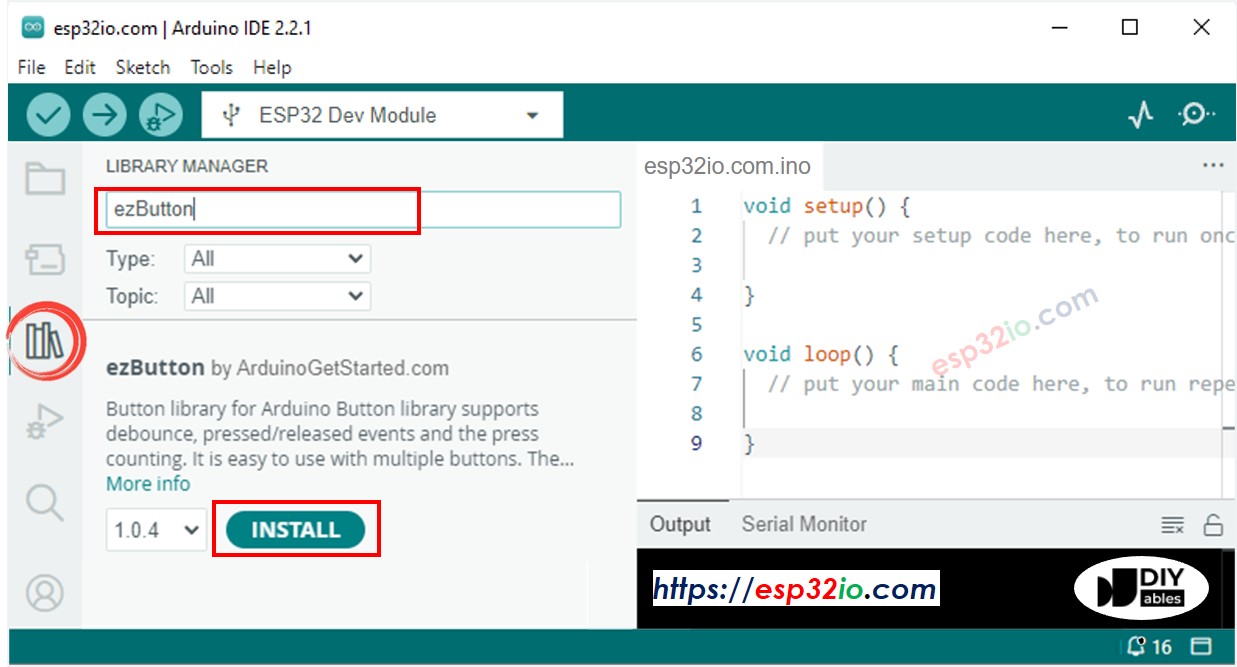
- Cliquez sur l'icône Libraries dans la barre latérale gauche de l'Arduino IDE.
- Recherchez "ezButton", puis trouvez la bibliothèque de boutons par ArduinoGetStarted.com.
- Cliquez sur le bouton Install pour installer la bibliothèque ezButton.
- Copiez le code ci-dessus et ouvrez-le avec l'IDE Arduino
- Cliquez sur le bouton Upload dans l'IDE Arduino pour téléverser le code sur ESP32
- Si le câblage est correct, vous verrez le moteur tourner dans le sens des aiguilles d'une montre.
- Touchez l'interrupteur de fin de course
- Vous verrez que le moteur s'arrête immédiatement
- Le résultat sur le moniteur série apparaît comme ci-dessous
Explication du code
Vous pouvez trouver l'explication dans la ligne de commentaires du code Arduino ci-dessus.
Code ESP32 - Changer la direction d'un moteur à courant continu via un interrupteur de fin de course
Le code ci-dessous fait tourner un moteur à courant continu indéfiniment et change sa direction lorsqu'un interrupteur de fin de course est touché.
Étapes rapides
- Si c'est la première fois que vous utilisez un ESP32, consultez Installation du logiciel ESP32..
- Réalisez le câblage comme sur l'image ci-dessus.
- Connectez la carte ESP32 à votre PC via un câble micro USB.
- Ouvrez Arduino IDE sur votre PC.
- Sélectionnez la bonne carte ESP32 (par exemple, Module de développement ESP32) et le port COM.
- Copiez le code ci-dessus et ouvrez-le avec Arduino IDE.
- Cliquez sur le bouton Upload dans Arduino IDE pour charger le code sur ESP32.
- Si le câblage est correct, vous verrez le moteur tourner dans le sens des aiguilles d'une montre.
- Touchez l'interrupteur de limite.
- Vous verrez la direction du moteur à courant continu changer en sens antihoraire.
- Touchez à nouveau l'interrupteur de limite.
- Vous verrez la direction du moteur à courant continu changer en sens horaire.
- Le résultat sur le moniteur série apparaît comme ci-dessous.
Code ESP32 - Changer la direction d'un moteur à courant continu avec deux interrupteurs de fin de course
Le code ci-dessous permet à un moteur à courant continu de tourner indéfiniment et de changer de direction lorsqu'un des deux interrupteurs de fin de course est activé.
Étapes rapides
- Si c'est la première fois que vous utilisez l'ESP32, consultez Installation du logiciel ESP32..
- Réalisez le câblage comme sur l'image ci-dessus.
- Connectez la carte ESP32 à votre PC via un câble micro USB.
- Ouvrez Arduino IDE sur votre PC.
- Sélectionnez la bonne carte ESP32 (par exemple, Module de développement ESP32) et le port COM.
- Copiez le code ci-dessus et ouvrez-le avec Arduino IDE.
- Cliquez sur le bouton Upload dans Arduino IDE pour charger le code sur l'ESP32.
- Si le câblage est correct, vous verrez le moteur tourner dans le sens des aiguilles d'une montre.
- Touchez l'interrupteur de limite 1.
- Vous verrez la direction du moteur à courant continu changer en sens anti-horaire.
- Touchez l'interrupteur de limite 2.
- Vous verrez la direction du moteur à courant continu changer en sens horaire.
- Le résultat sur le moniteur série ressemble à ce qui suit.