ESP32 - Moteur pas à pas
Dans ce tutoriel, nous allons apprendre à utiliser l'ESP32 pour contrôler le moteur pas à pas :
- Comment utiliser le pilote L298N pour contrôler un moteur pas à pas bipolaire
- Comment contrôler la position d'un moteur pas à pas
- Comment contrôler la vitesse d'un moteur pas à pas
- Comment contrôler la direction d'un moteur pas à pas
Le tutoriel peut s'appliquer à tout type de moteur pas à pas bipolaire (4 fils). Le tutoriel prendra le moteur pas à pas NEMA 17 comme exemple.
Préparation du matériel
Ou vous pouvez acheter les kits suivants:
| 1 | × | Kit de Démarrage DIYables ESP32 (ESP32 inclus) | |
| 1 | × | Kit de Capteurs DIYables (18 capteurs/écrans) |
À propos du moteur pas à pas
Il existe deux types courants de moteurs pas à pas:
- Bipolaire : Ces moteurs sont équipés de 4 fils.
- Unipolaire : Les moteurs unipolaires peuvent avoir 5 ou 6 fils. Dans le cas d'un moteur pas à pas unipolaire à 6 fils, vous pouvez utiliser efficacement quatre des six fils pour le contrôler comme s'il s'agissait d'un moteur pas à pas bipolaire.
Si vous vous intéressez spécifiquement à un moteur pas à pas unipolaire à 5 fils, vous pouvez consulter le tutoriel intitulé ESP32 - Moteur pas à pas 28BYJ-48 avec pilote ULN2003..
Cependant, ce tutoriel est exclusivement dédié aux moteurs pas à pas bipolaires.
Brochage du moteur pas à pas bipolaire
Un moteur pas à pas bipolaire possède quatre broches, et ces broches peuvent être nommées différemment selon le fabricant. Ci-dessous, vous trouverez un tableau avec quelques noms de broches courants :
| PIN NO | Naming 1 | Naming 2 | Naming 3 |
|---|---|---|---|
| 1 | A+ | A | A |
| 2 | A- | A | C |
| 3 | B+ | B | B |
| 4 | B- | B | D |
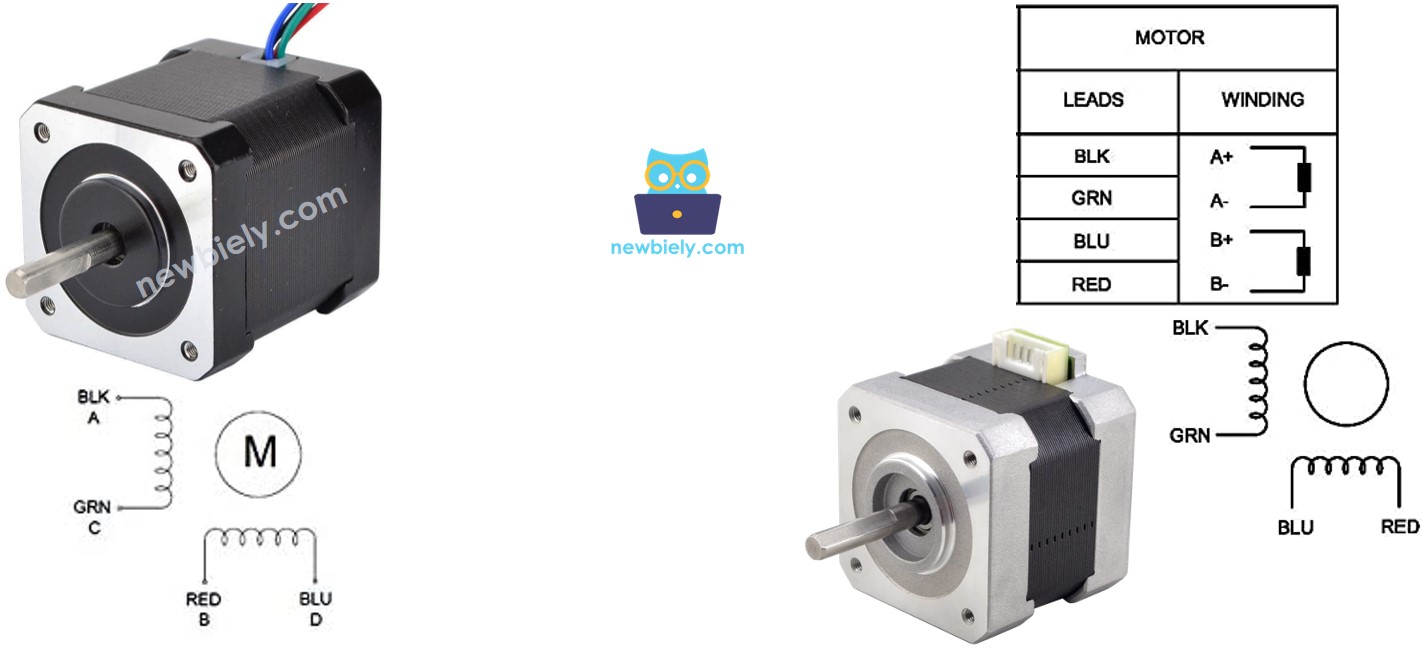
L'agencement des broches, les noms des fils et les couleurs des fils peuvent varier d'un fabricant à l'autre. Pour comprendre comment les couleurs des fils correspondent aux noms des broches, il est essentiel de consulter la fiche technique ou le manuel d'utilisation fourni par le fabricant. L'image ci-dessus illustre les spécifications de deux moteurs distincts, chacun présentant ses propres conventions de nommage et de coloration des fils.
Étapes par révolution
La spécification du moteur indique le degré par pas (appelons cela DEG_PAR_PAS). Selon la méthode de contrôle, le nombre de pas par révolution (appelons cela PAS_PAR_REVOLUTION) est calculé comme le montre le tableau suivant :
| Control method | Steps per Revolution | Real degree per step |
|---|---|---|
| Full-step | STEP_PER_REVOLUTION = 360 / DEG_PER_STEP | DEG_PER_STEP |
| Half-step | STEP_PER_REVOLUTION = (360 / DEG_PER_STEP) * 2 | DEG_PER_STEP / 2 |
| Micro-step (1/n) | STEP_PER_REVOLUTION = (360 / DEG_PER_STEP) * n | DEG_PER_STEP / n |
Par exemple, si la fiche technique du moteur indique 1,8 degré/étape :
| Control method | Steps per Revolution | Real degree per step |
|---|---|---|
| Full-step | 200 steps/revolution | 1.8° |
| Half-step | 400 steps/revolution | 0.9° |
| Micro-step (1/n) | (200 * n) steps/revolution | (1.8 / n)° |
Comment contrôler un moteur pas à pas avec un ESP32
L'ESP32 peut produire des signaux pour commander le moteur pas à pas, mais ces signaux peuvent manquer des niveaux de tension et de courant nécessaires que le moteur pas à pas exige. Par conséquent, un pilote matériel intermédiaire est nécessaire pour combler l'écart entre l'ESP32 et le moteur pas à pas. Ce pilote remplit deux fonctions principales :
- Amplification des signaux de contrôle : Elle augmente le courant et la tension des signaux de contrôle provenant de l'ESP32, garantissant qu'ils répondent aux exigences du moteur pas à pas.
- Protection de l'ESP32 : Parallèlement, elle protège l'ESP32 des niveaux de courant et de tension plus élevés utilisés pour alimenter le moteur pas à pas, évitant ainsi tout dommage potentiel.
Différents pilotes matériels sont disponibles pour contrôler les moteurs pas à pas, et une option couramment utilisée est le pilote L298N.
À propos du pilote L298N
Un seul pilote L298N peut être utilisé pour contrôler deux moteurs à courant continu ou un moteur pas à pas. Dans ce tutoriel, nous apprenons à l'utiliser pour contrôler le moteur pas à pas.
Brochage du pilote L298N
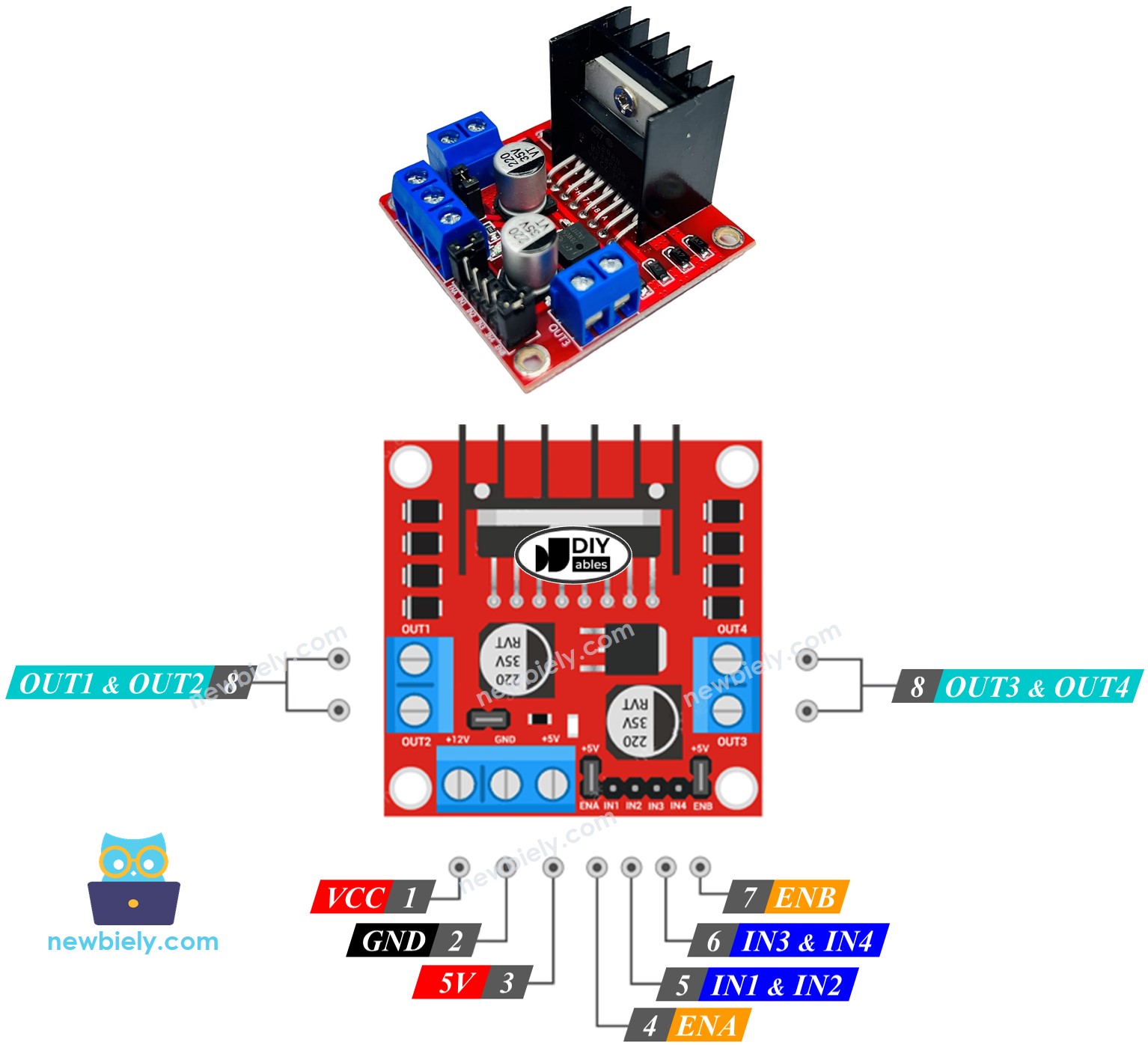
Le pilote L298N possède 11 broches et trois cavaliers :
- Broche VCC : alimente le moteur. Elle peut varier entre 5 et 35V.
- Broche GND : est une broche de masse commune, doit être connectée au GND (0V).
- Broche 5V : fournit l'alimentation pour le module L298N. Elle peut être alimentée par 5V depuis l'ESP32.
- Broches IN1, IN2, IN3, IN4 : sont connectées aux broches de l'ESP32 pour recevoir le signal de commande pour contrôler le moteur pas à pas.
- Broches OUT1, OUT2, OUT3, OUT4 : sont connectées au moteur pas à pas.
- Cavaliers ENA, ENB : sont utilisés pour activer le moteur pas à pas. Vous devez garder les cavaliers ENA & ENB en place.
- Cavalier 5V-EN : si nous laissons le cavalier 5V-EN en place, l'alimentation pour le module L298N est tirée de VCC, nous n'avons pas besoin de connecter quoi que ce soit à la broche 5V. si nous retirons le cavalier 5V-EN, nous devons alimenter le module L298N via une broche 5V.
Comme décrit ci-dessus, le pilote L298N dispose de deux alimentations d'entrée :
- Un pour le moteur pas à pas (broches VCC et GND) : de 5 à 35V.
- Un pour le fonctionnement interne du module L298N (broches 5V et GND) : de 5 à 7V. si le cavalier 5V-EN est laissé en place, nous n'avons pas besoin de connecter cette broche à quoi que ce soit.
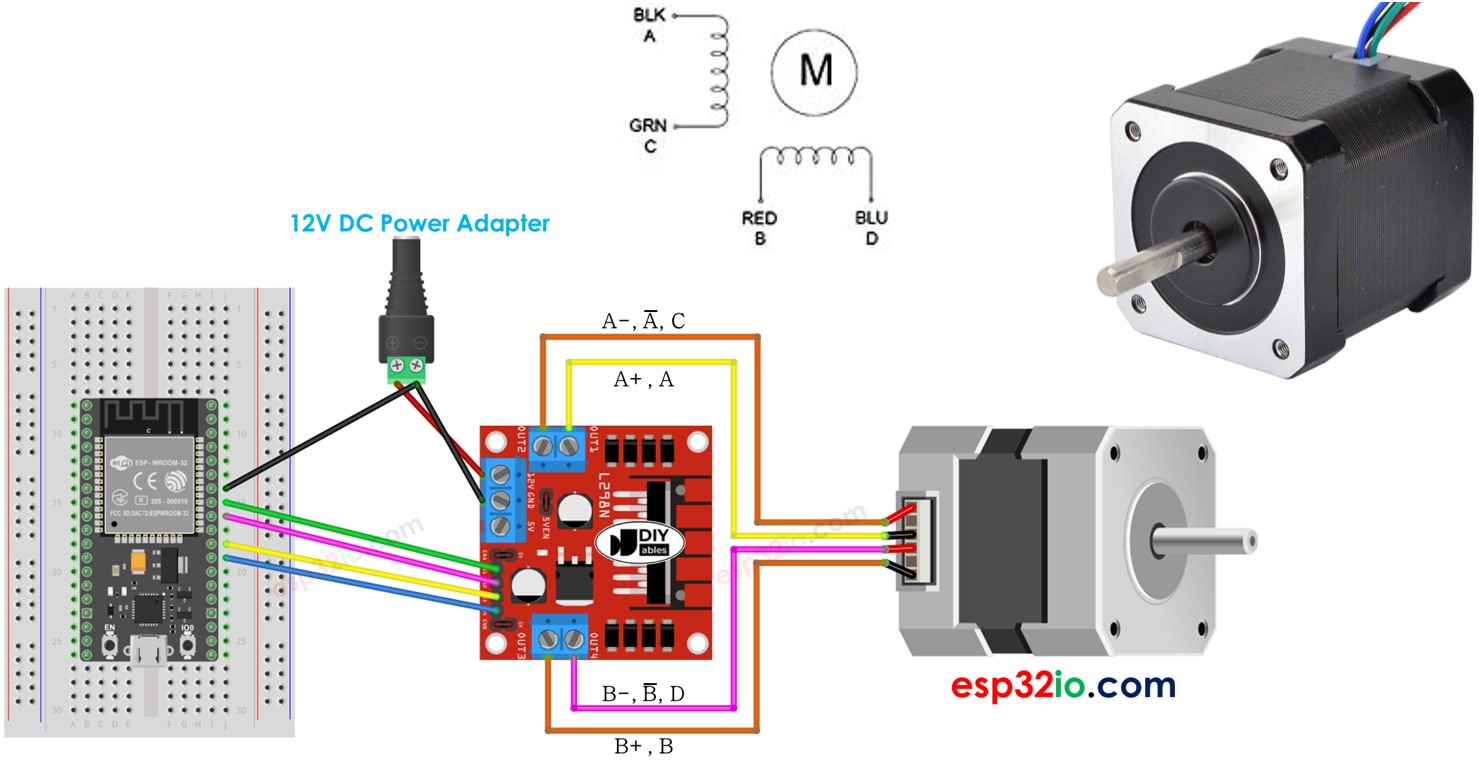
Diagramme de câblage
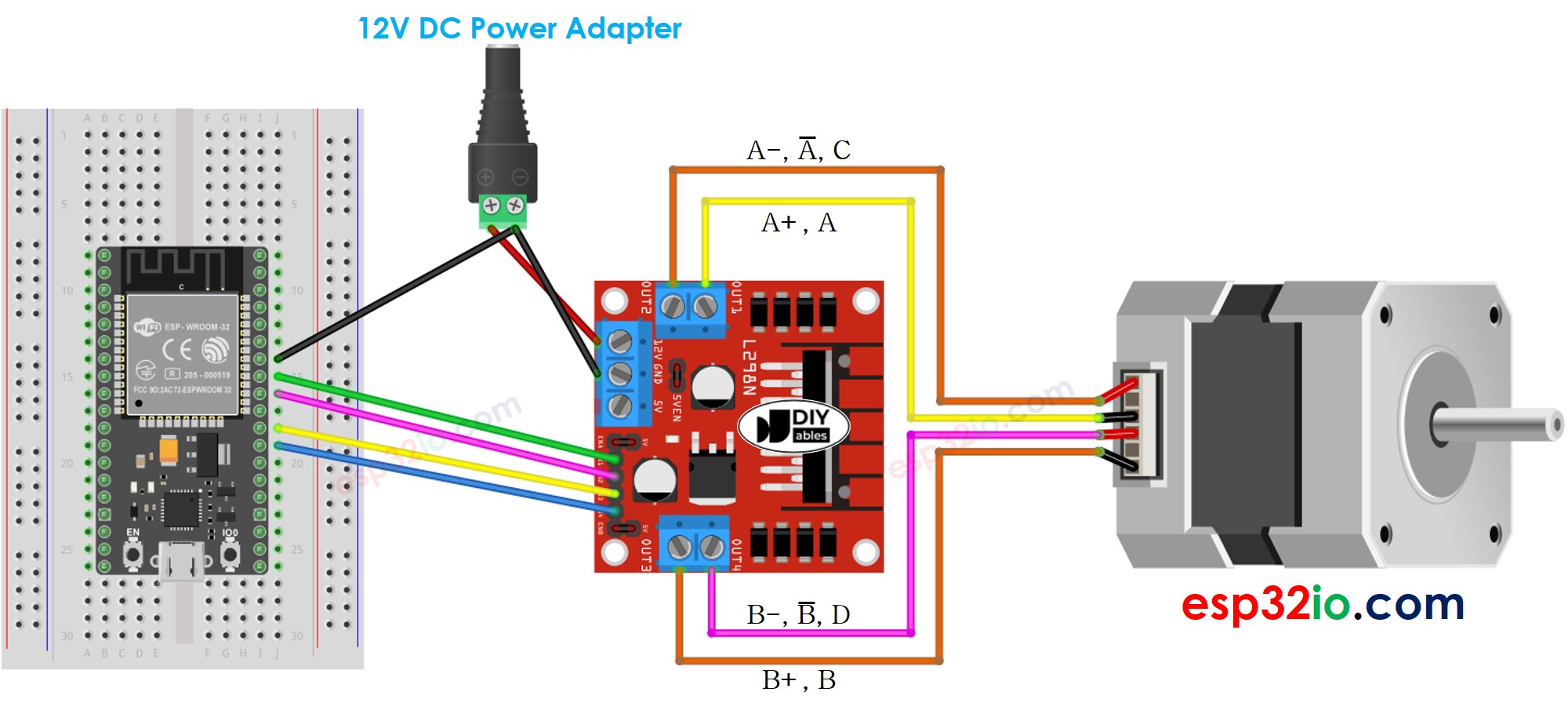
Cette image a été créée avec Fritzing. Cliquez pour agrandir l'image.
Si vous ne savez pas comment alimenter l'ESP32 et d'autres composants, consultez les instructions dans le tutoriel suivant : Comment alimenter l'ESP32..
※ Note:
- Veuillez laisser en place les trois cavaliers sur le module L298N (si l'alimentation du moteur est ≤ 12V).
- L'ordre des broches sur les moteurs pas à pas peut varier selon les fabricants. Veuillez vérifier le tableau ci-dessous pour un câblage correct.
Tableau de câblage entre ESP32 et le pilote L298N
| ESP32 pins | L298N pins |
|---|---|
| 7 | IN1 |
| 6 | IN2 |
| 5 | IN3 |
| 4 | IN4 |
Tableau de câblage entre le pilote L298N et le moteur pas à pas
Important ! Veuillez ne pas tenir compte de l'ordre des fils du moteur pas à pas sur l'image du schéma de câblage ci-dessus. Ce n'est qu'un exemple. L'ordre des broches sur les moteurs pas à pas peut varier selon les fabricants. Assurez-vous que votre câblage suit le tableau ci-dessous.
| L298N pins | Stepper motor pins | Or | Or |
|---|---|---|---|
| OUT1 | A+ | A | A |
| OUT2 | A- | A | C |
| OUT3 | B+ | B | B |
| OUT4 | B- | B | D |
Avant d'acheter un moteur pas à pas, nous vous recommandons de vérifier la fiche technique, les spécifications ou le manuel du moteur pas à pas. Assurez-vous qu'ils fournissent la correspondance entre la couleur des broches et leur nom. Par exemple, ce moteur pas à pas fournit la correspondance comme l'image ci-dessous :
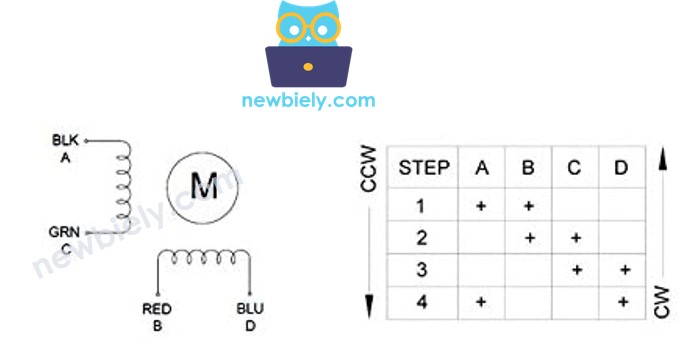
Sur la base de ce schéma, le tableau de câblage devient :
| L298N pins | stepper motor pins | wire color |
|---|---|---|
| OUT1 | A | black wire |
| OUT2 | C | green wire |
| OUT3 | B | red wire |
| OUT4 | D | blue wire |
※ Note:
Dans tous les tableaux de câblage ci-dessus entre le moteur pas à pas et le pilote L298N, nous pouvons échanger OUT1 avec OUT2, OUT3 avec OUT4. Par conséquent, il existe plusieurs manières de réaliser le câblage. Cependant, si nous les échangeons, le sens de rotation des moteurs peut être modifié (dans le sens horaire vers le sens antihoraire, et vice versa).
Comment contrôler un moteur pas à pas avec un pilote L298N.
Contrôler un moteur pas à pas n'est pas une tâche simple, surtout lorsque nous voulons le contrôler de manière non bloquante. Heureusement, grâce à la bibliothèque AccelStepper, contrôler le moteur pas à pas devient un jeu d'enfant.
L'IDE Arduino comprend également une bibliothèque Stepper intégrée. Cependant, nous ne vous recommandons pas d'utiliser cette bibliothèque car :
- La bibliothèque fournit la fonction de blocage. Cela signifie qu'elle empêche l'ESP32 de réaliser d'autres tâches pendant qu'elle contrôle le moteur pas à pas.
- Elle ne dispose pas de fonctions suffisantes.
Nous vous recommandons plutôt d'utiliser la bibliothèque AccelStepper. Cette bibliothèque prend en charge :
- Accélération
- Décélération.
- Conduite en pas entier et demi-pas.
- Plusieurs moteurs pas-à-pas simultanés, avec des pas indépendants et simultanés sur chaque moteur.
- Inconvénient : NE prend PAS en charge la conduite en micro-pas.
Comment contrôler la position d'un moteur pas à pas via un pilote L298N
Nous pouvons déplacer le moteur pas à pas vers la position souhaitée en utilisant :
※ Note:
La fonction stepper.moveTo() est non bloquante. C'est un excellent point de la bibliothèque. Cependant, nous devons être attentifs lorsque nous utilisons cette fonction :
- Appelez 'stepper.run()' aussi fréquemment que possible. Elle doit être appelée dans la fonction void loop().
- N'utilisez PAS la fonction delay() lorsque le moteur est en mouvement.
- Vous ne devriez PAS utiliser les fonctions Serial.print() et Serial.println() lorsque le moteur est en mouvement. Ces fonctions ralentissent le mouvement du moteur pas à pas.
Comment contrôler la vitesse d'un moteur pas à pas via le pilote L298N
Nous pouvons contrôler non seulement la vitesse mais aussi l'accélération et la décélération en utilisant quelques fonctions simples.
Comment contrôler la direction d'un moteur pas à pas via le pilote L298N
Si vous effectuez le câblage comme ci-dessus, le moteur tournera dans :
- Sens horaire : si nous contrôlons le moteur d'une position à une position supérieure (Inc
Par exemple :
- Si la position actuelle est 100 et que nous contrôlons le moteur à 200, le moteur tourne dans le sens des aiguilles d'une montre.
- Si la position actuelle est -200 et que nous contrôlons le moteur à -100, le moteur tourne dans le sens des aiguilles d'une montre.
- Si la position actuelle est 200 et que nous contrôlons le moteur à 100, le moteur tourne dans le sens contraire des aiguilles d'une montre.
- Si la position actuelle est -100 et que nous contrôlons le moteur à -200, le moteur tourne dans le sens contraire des aiguilles d'une montre.
※ Note:
Comme mentionné précédemment, si vous échangez OUT1 avec OUT2, ou OUT3 avec OUT4, l'augmentation de la position peut être dans le sens antihoraire et la diminution de la position peut être dans le sens horaire.
Comment arrêter un moteur pas à pas
- Le moteur pas à pas s'arrêtera automatiquement après avoir atteint la position désirée.
- Le moteur pas à pas peut être forcé à s'arrêter immédiatement à tout moment en utilisant la fonction stepper.stop().
Code ESP32 - Code pour moteur pas à pas
Le code ci-dessous fait :
- Faites tourner le moteur d'une révolution dans le sens horaire
- Arrêtez le moteur 5 secondes
- Faites tourner le moteur d'une révolution dans le sens antihoraire
- Arrêtez le moteur 5 secondes
- Ce processus est répété encore et encore
Étapes rapides
- Si c'est la première fois que vous utilisez l'ESP32, consultez Installation du logiciel ESP32..
- Faites le câblage comme sur l'image ci-dessus.
- Connectez la carte ESP32 à votre PC via un câble micro USB.
- Ouvrez Arduino IDE sur votre PC.
- Sélectionnez la bonne carte ESP32 (par exemple, Module de développement ESP32) et le port COM.
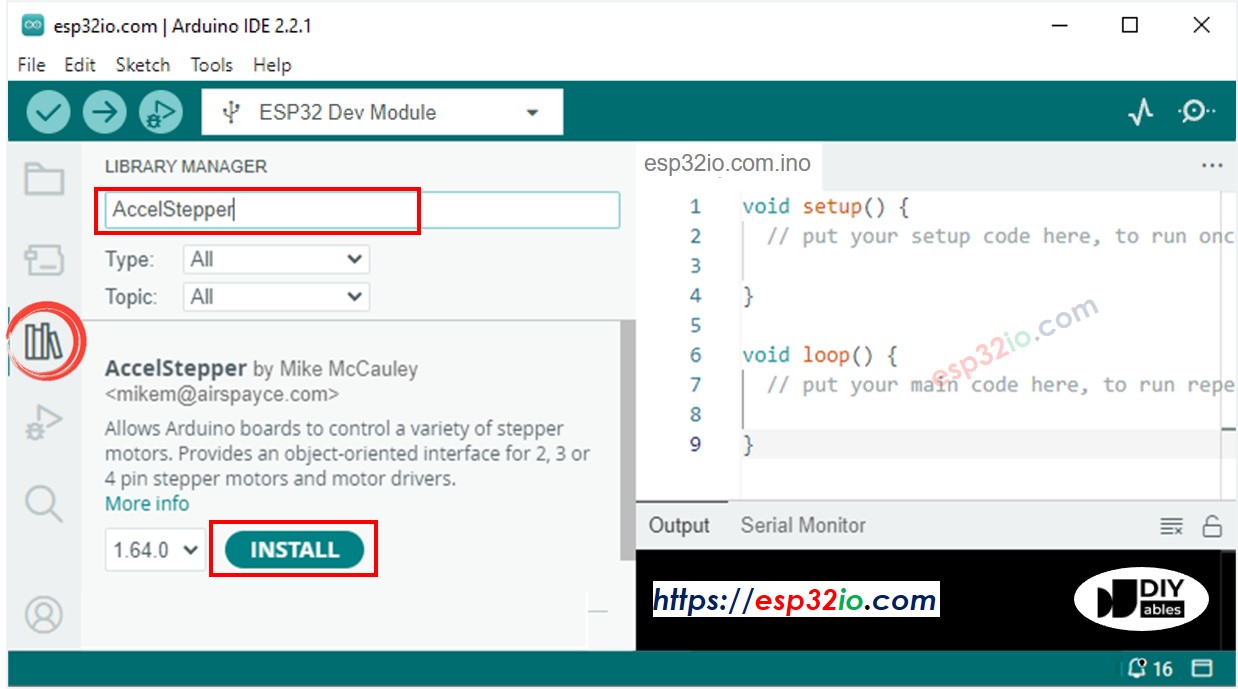
- Cliquez sur l'icône Libraries dans la barre de gauche de l’Arduino IDE.
- Recherchez "AccelStepper", puis trouvez la bibliothèque AccelStepper de Mike McCauley.
- Cliquez sur le bouton Install pour installer la bibliothèque AccelStepper.
- Copiez le code ci-dessus et ouvrez-le avec l'IDE Arduino
- Cliquez sur le bouton Upload sur l'IDE Arduino pour téléverser le code sur l'ESP32
- Vous verrez :
- Le moteur pas à pas effectue une révolution dans le sens des aiguilles d'une montre
- Le moteur pas à pas s'arrête 5 secondes
- Le moteur pas à pas effectue une révolution dans le sens inverse des aiguilles d'une montre
- Le moteur pas à pas s'arrête 5 secondes
- Le processus ci-dessus est répété continuellement.
- Visualisez le résultat sur le moniteur série
Explication du code
Lisez l'explication ligne par ligne dans les lignes de commentaire du code source !