ESP32 - Moteur pas à pas et interrupteur de fin de course
Dans ce tutoriel ESP32, nous explorerons comment utiliser l'ESP32, un interrupteur de fin de course, le pilote L298N et un moteur pas à pas. Plus précisément, nous aborderons :
- Arrêt du moteur pas à pas lorsqu'un interrupteur de fin de course est touché.
- Changement de direction du moteur pas à pas lorsqu'un interrupteur de fin de course est touché.
- Changement de direction du moteur pas à pas lorsque deux interrupteurs de fin de course sont touchés.
Ces sujets vous permettront de créer des applications de mouvement contrôlées et polyvalentes avec votre ESP32.
Préparation du matériel
Ou vous pouvez acheter les kits suivants:
| 1 | × | Kit de Démarrage DIYables ESP32 (ESP32 inclus) | |
| 1 | × | Kit de Capteurs DIYables (18 capteurs/écrans) |
À propos du moteur pas à pas et de l'interrupteur de fin de course
Si vous ne connaissez pas le moteur pas à pas et l'interrupteur de fin de course (brochage, fonctionnement, programmation...), renseignez-vous à leur sujet dans les tutoriels suivants :
- ESP32 - Moteur pas à pas. tutorial
Diagramme de câblage
Ce tutoriel fournit les codes ESP32 pour deux cas : un moteur pas à pas + un interrupteur de fin de course, un moteur pas à pas + deux interrupteurs de fin de course.
- Schéma de câblage entre le moteur pas à pas et un interrupteur de fin de course
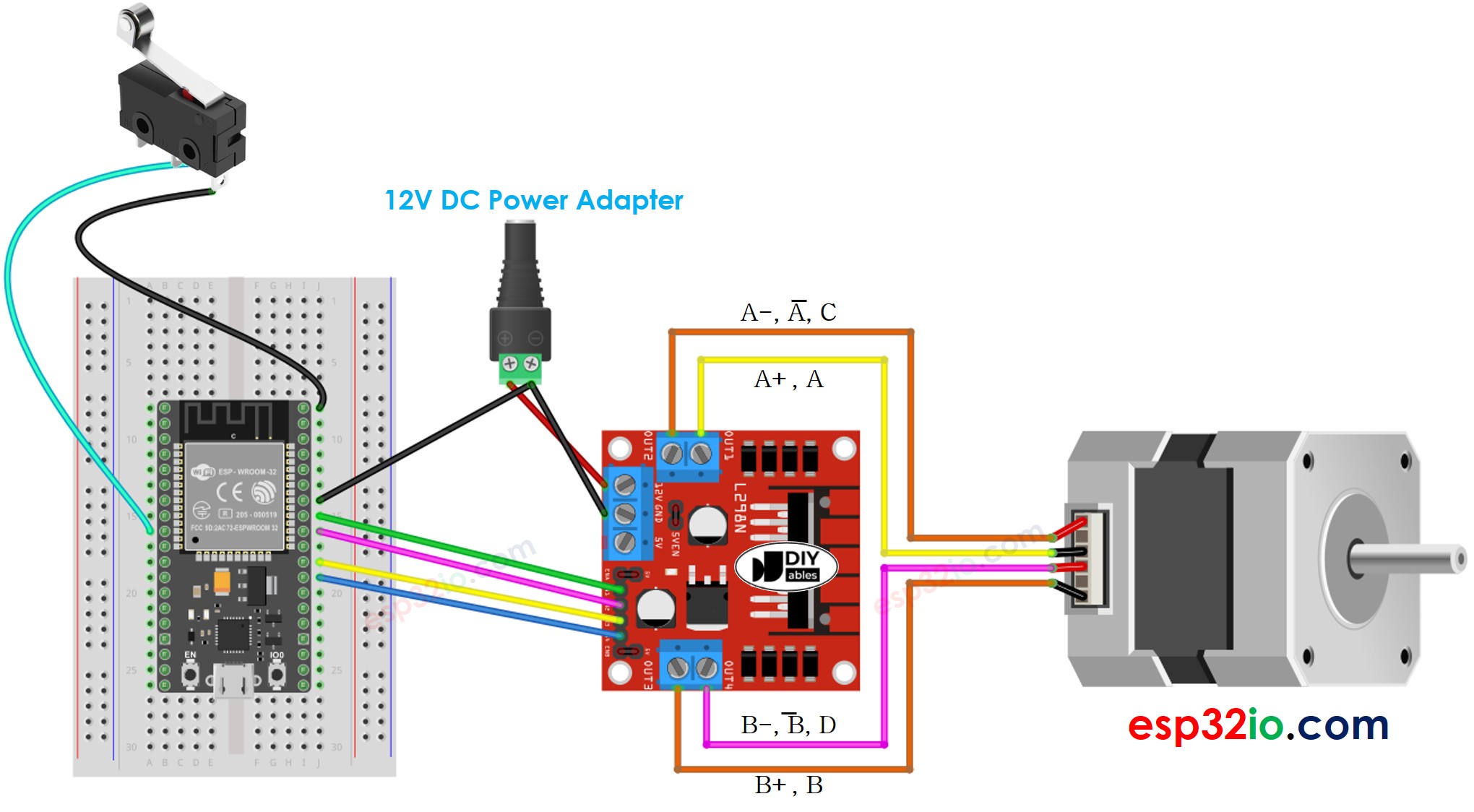
Cette image a été créée avec Fritzing. Cliquez pour agrandir l'image.
Si vous ne savez pas comment alimenter l'ESP32 et d'autres composants, consultez les instructions dans le tutoriel suivant : Comment alimenter l'ESP32..
- Schéma de câblage entre le moteur pas à pas et deux interrupteurs de fin de course.
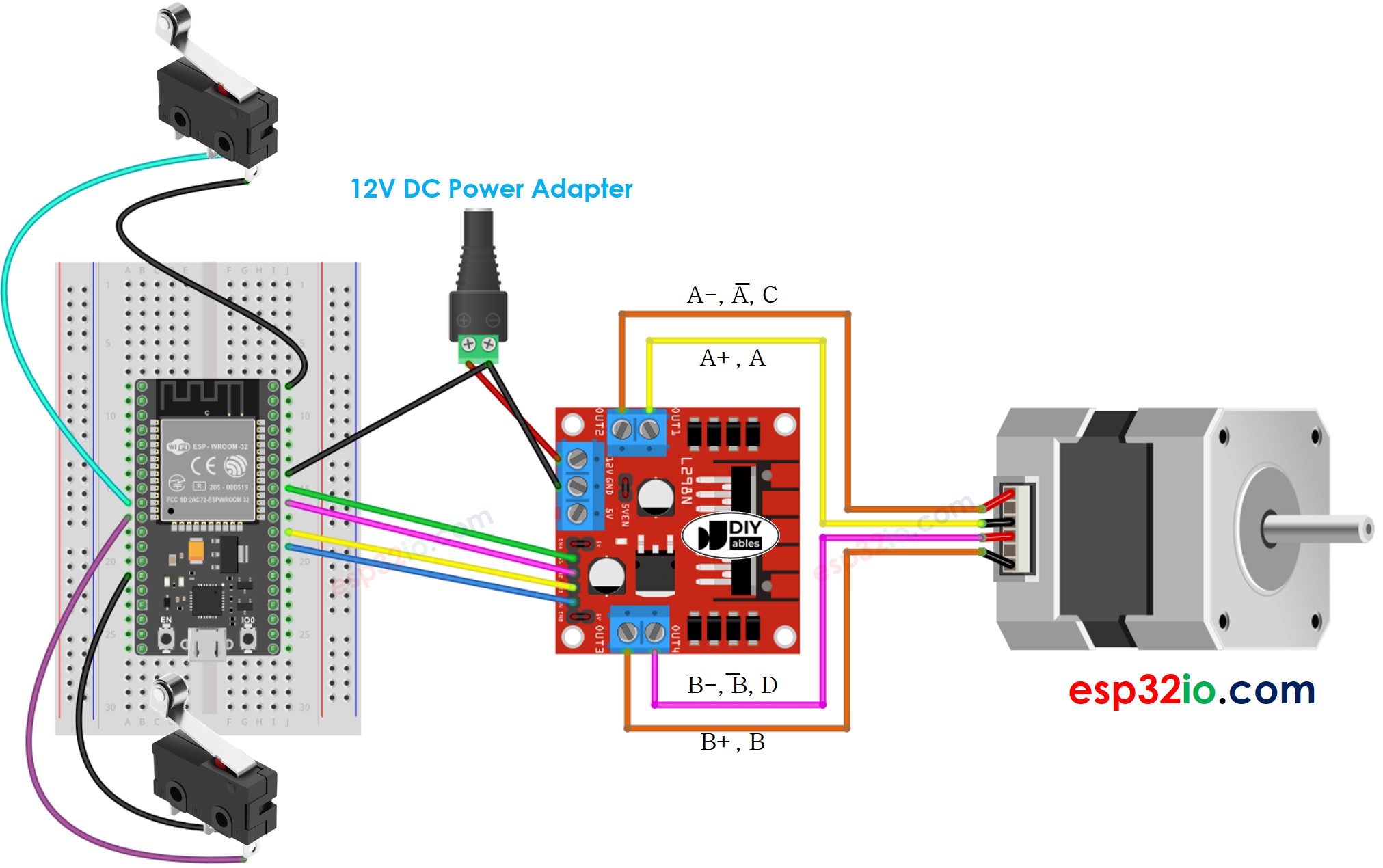
Cette image a été créée avec Fritzing. Cliquez pour agrandir l'image.
※ Note:
En fonction du moteur pas à pas, la connexion des câbles entre le moteur pas à pas et le L298N peut être différente. Veuillez consulter attentivement ce tutoriel ESP32 - Moteur pas à pas. pour voir comment connecter le moteur pas à pas au pilote de moteur L298N.
Code ESP32 - Arrêter un moteur pas à pas avec un interrupteur de fin de course
Il existe plusieurs façons de faire arrêter un moteur pas à pas :
- Appelez la fonction stepper.stop() : Cette méthode ne permet PAS d'arrêter le moteur pas à pas immédiatement, mais progressivement.
- Ne pas appeler la fonction stepper.run() : Cette méthode arrête le moteur pas à pas immédiatement.
Le code ci-dessous fait tourner un moteur pas à pas indéfiniment et s'arrête immédiatement lorsqu'un interrupteur de fin de course est touché.
Étapes rapides
- Si c'est la première fois que vous utilisez l'ESP32, consultez Installation du logiciel ESP32..
- Réalisez le câblage comme sur l'image ci-dessus.
- Connectez la carte ESP32 à votre PC via un câble micro USB.
- Ouvrez Arduino IDE sur votre PC.
- Sélectionnez la bonne carte ESP32 (par exemple, Module de développement ESP32) et le port COM.
- Connectez l'ESP32 au PC via un câble USB.
- Ouvrez Arduino IDE, sélectionnez la bonne carte et le bon port.
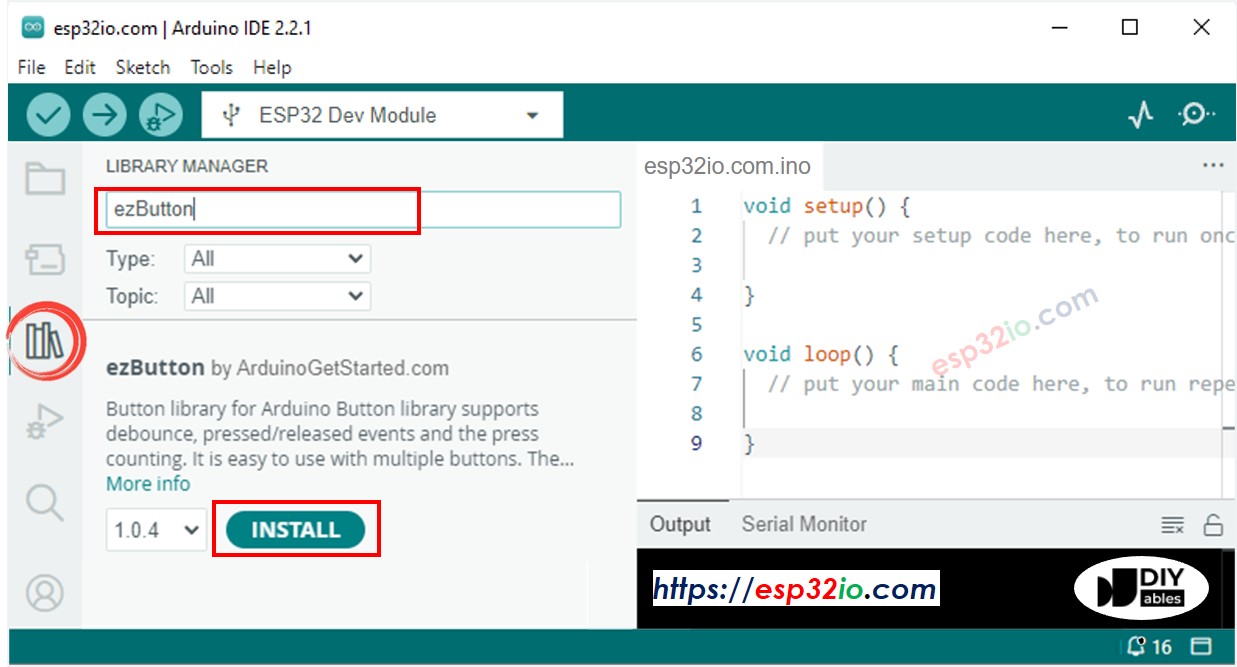
- Cliquez sur l'icône Libraries dans la barre latérale gauche de l'Arduino IDE.
- Recherchez "ezButton", puis trouvez la bibliothèque du bouton par ArduinoGetStarted.com.
- Cliquez sur le bouton Install pour installer la bibliothèque ezButton.
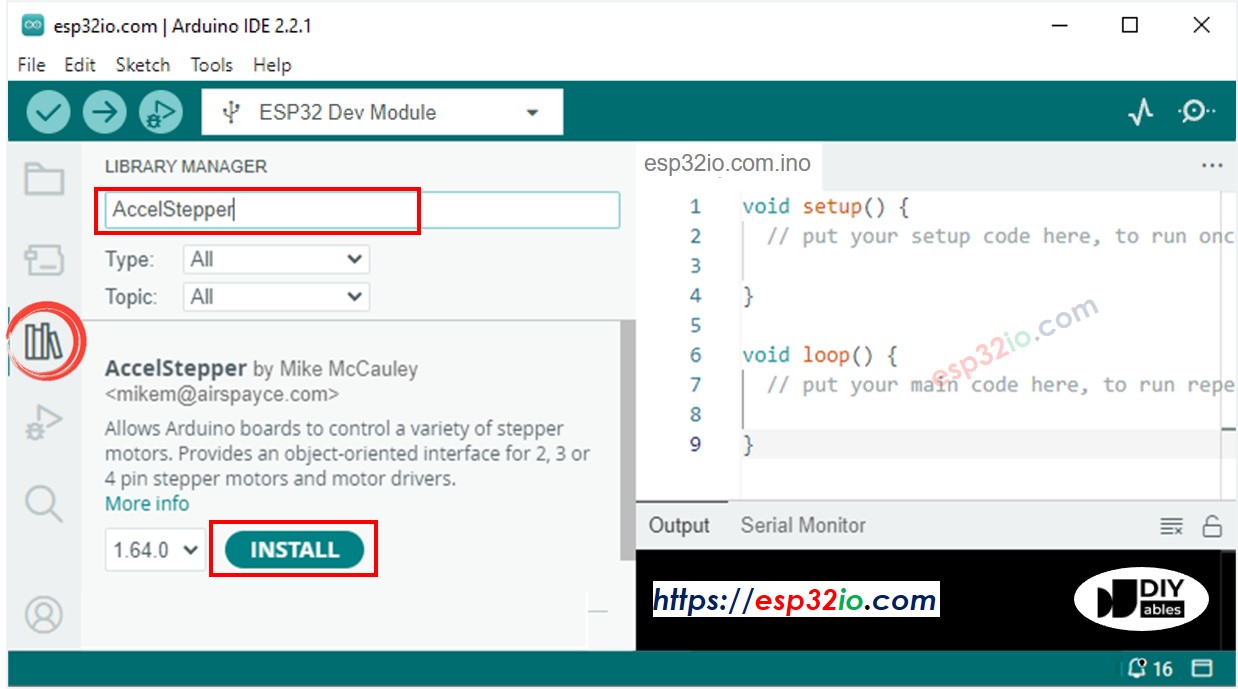
- Recherchez "AccelStepper", puis trouvez la bibliothèque AccelStepper de Mike McCauley.
- Cliquez sur le bouton Install pour installer la bibliothèque AccelStepper.
- Copiez le code ci-dessus et ouvrez-le avec l'IDE Arduino
- Cliquez sur le bouton Upload de l'IDE Arduino pour téléverser le code sur l'ESP32
- Si le câblage est correct, vous verrez le moteur tourner dans le sens des aiguilles d'une montre.
- Touchez l'interrupteur de fin de course
- Vous verrez que le moteur s'arrête immédiatement
- Le résultat sur le moniteur série apparaît comme ci-dessous
Explication du code
Vous pouvez trouver l'explication dans la ligne de commentaires du code Arduino ci-dessus.
Code ESP32 - Changer la direction d'un moteur pas à pas par un interrupteur de fin de course
Le code ci-dessous permet de faire tourner un moteur pas à pas indéfiniment et de changer sa direction lorsqu'un interrupteur de fin de course est touché.
Étapes rapides
- Copiez le code ci-dessus et ouvrez-le avec l'IDE Arduino
- Cliquez sur le bouton Upload de l'IDE Arduino pour charger le code sur l'ESP32
- Si le câblage est correct, vous verrez le moteur tourner dans le sens des aiguilles d'une montre.
- Touchez l'interrupteur de fin de course
- Vous verrez la direction du moteur pas à pas changer en sens antihoraire
- Touchez à nouveau l'interrupteur de fin de course
- Vous verrez la direction du moteur pas à pas changer en sens horaire
- Le résultat sur le moniteur série apparaît comme ci-dessous
Code ESP32 - Changer la direction du moteur pas à pas avec deux interrupteurs de fin de course
Le code ci-dessous permet de faire tourner un moteur pas à pas indéfiniment et de changer sa direction lorsque l'un des deux interrupteurs de fin de course est actionné.
Étapes rapides
- Copiez le code ci-dessus et ouvrez-le avec Arduino IDE
- Cliquez sur le bouton Upload dans Arduino IDE pour téléverser le code vers ESP32
- Si le câblage est correct, vous verrez le moteur tourner dans le sens horaire.
- Touchez l'interrupteur de limite 1
- Vous verrez que la direction du moteur pas à pas est modifiée en sens antihoraire
- Touchez l'interrupteur de limite 2
- Vous verrez que la direction du moteur pas à pas est modifiée en sens horaire
- Le résultat sur le moniteur série apparaît comme ci-dessous