ESP32 - MG996R
Dans ce tutoriel, nous allons apprendre à utiliser le servo moteur à couple élevé MG996R avec un ESP32.
Préparation du matériel
Ou vous pouvez acheter les kits suivants:
| 1 | × | Kit de Démarrage DIYables ESP32 (ESP32 inclus) | |
| 1 | × | Kit de Capteurs DIYables (18 capteurs/écrans) |
Note d'achat: Si vous utilisez plusieurs servomoteurs, nous recommandons d'utiliser le PCA9685 16 Channel PWM Servo Driver Module pour économiser les broches du MCU et faciliter le câblage.
À propos du Servomoteur
Le moteur servo MG996R est un moteur servo à couple élevé capable de soulever jusqu'à 15 kg de poids. Ce moteur peut faire pivoter sa manette de 0° à 180°, offrant un contrôle précis de la position angulaire. Pour des informations de base sur les moteurs servo, veuillez consulter le tutoriel ESP32 - Moteur servo..
Brochage
Le moteur servo MG996R utilisé dans cet exemple comprend trois broches :
- Broche VCC : (généralement rouge) doit être connectée à VCC (4,8V – 7,2V)
- Broche GND : (généralement noire ou marron) doit être connectée à GND (0V)
- Broche de signal : (généralement jaune ou orange) reçoit le signal de commande PWM d'une broche de l'ESP32.

Diagramme de câblage
Étant donné que le MG996R est un servo moteur à couple élevé, il consomme beaucoup de puissance. Nous ne devons pas alimenter ce moteur via la broche 5v de l'ESP32. Au lieu de cela, nous devons utiliser l'alimentation externe pour le servo moteur MG996R.

Cette image a été créée avec Fritzing. Cliquez pour agrandir l'image.
Si vous ne savez pas comment alimenter l'ESP32 et d'autres composants, consultez les instructions dans le tutoriel suivant : Comment alimenter l'ESP32..
Code ESP32
Étapes rapides
- Si c'est la première fois que vous utilisez l'ESP32, consultez Installation du logiciel ESP32..
- Effectuez le câblage comme sur l'image ci-dessus.
- Connectez la carte ESP32 à votre PC via un câble micro USB.
- Ouvrez Arduino IDE sur votre PC.
- Sélectionnez la bonne carte ESP32 (par exemple, Module de développement ESP32) et le port COM.
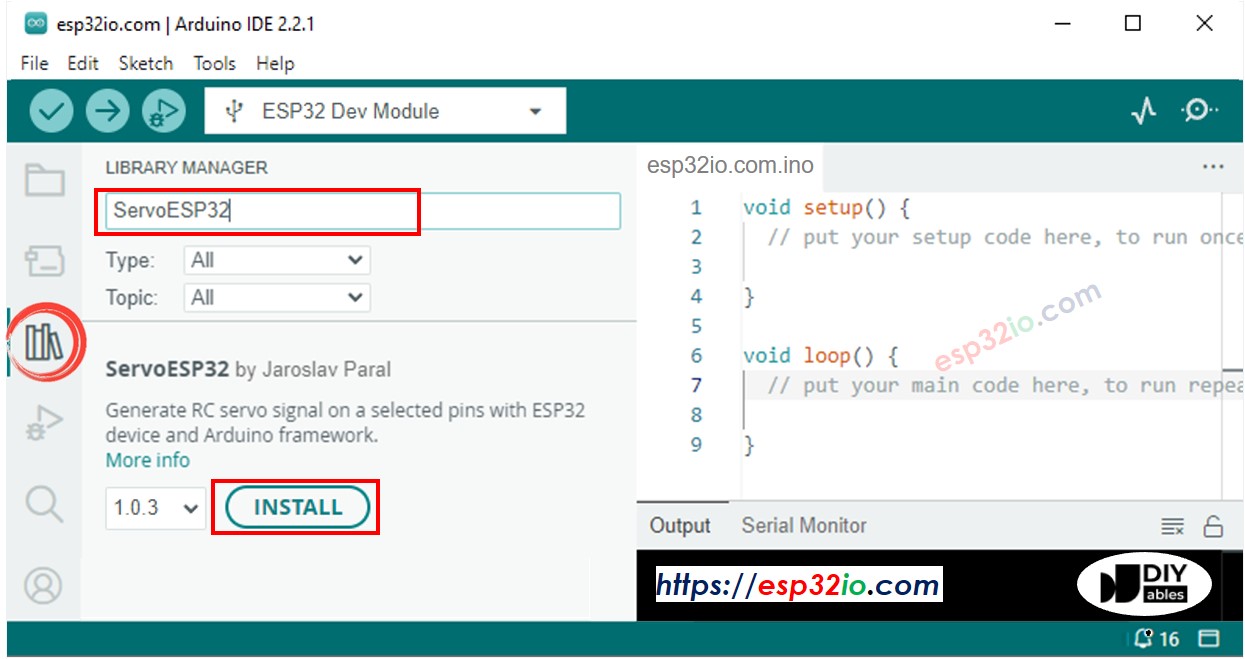
- Cliquez sur l'icône Libraries dans la barre de gauche de l'Arduino IDE.
- Tapez ESP32Servo dans la boîte de recherche, puis recherchez la bibliothèque servo par Kevin Harrington,John K. Bennett.
- Cliquez sur le bouton Install pour installer la bibliothèque du moteur servo pour ESP32.
- Connectez l'ESP32 au PC via un câble USB
- Ouvrez Arduino IDE, sélectionnez la carte et le port appropriés
- Copiez le code ci-dessus et ouvrez-le avec Arduino IDE
- Cliquez sur le bouton Upload dans Arduino IDE pour téléverser le code sur l'ESP32

- Voyez le résultat : le moteur servo tourne lentement de 0 à 180° puis revient lentement de 180 à 0°.
Explication du code
Vous pouvez trouver l'explication dans la ligne de commentaires du code Arduino ci-dessus.
Comment contrôler la vitesse du moteur servo
En utilisant les fonctions map() et millis(), nous pouvons contrôler la vitesse du moteur servo de manière fluide sans bloquer d'autres codes.