ESP32 - Capteur de pluie - Moteur servo
Nous allons apprendre comment programmer l'ESP32 pour contrôler le moteur servo en cas de détection de pluie. En détail :
- Si la pluie est détectée, l'ESP32 fait tourner le moteur servo à 90 degrés.
- Si la pluie n'est pas détectée, l'ESP32 fait tourner le moteur servo à 0 degré.
Préparation du matériel
Ou vous pouvez acheter les kits suivants:
| 1 | × | Kit de Démarrage DIYables ESP32 (ESP32 inclus) | |
| 1 | × | Kit de Capteurs DIYables (18 capteurs/écrans) |
Divulgation : Certains des liens fournis dans cette section sont des liens affiliés Amazon. Nous pouvons recevoir une commission pour tout achat effectué via ces liens, sans coût supplémentaire pour vous. Nous vous remercions de votre soutien.
Note d'achat: Si vous utilisez plusieurs servomoteurs, nous recommandons d'utiliser le PCA9685 16 Channel PWM Servo Driver Module pour économiser les broches du MCU et faciliter le câblage.
À propos du moteur Servo et du capteur de pluie
Méconnaissant le moteur servo et le capteur de pluie, y compris leurs brochages, fonctionnalités et programmation ? Explorez des tutoriels complets sur ces sujets ci-dessous :
Diagramme de câblage
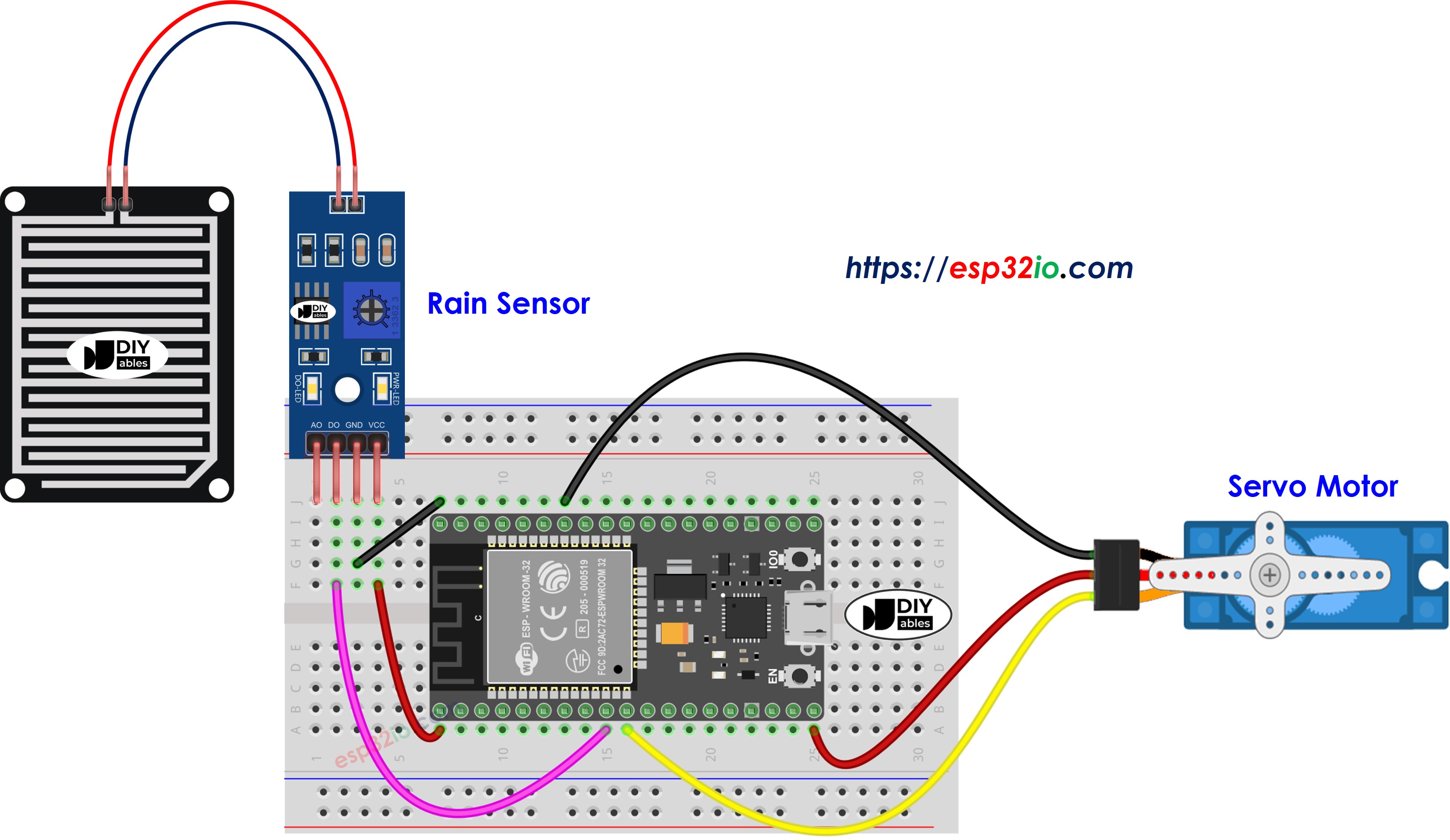
Cette image a été créée avec Fritzing. Cliquez pour agrandir l'image.
Si vous ne savez pas comment alimenter l'ESP32 et d'autres composants, consultez les instructions dans le tutoriel suivant : Comment alimenter l'ESP32..
Code ESP32 - Le capteur de pluie contrôle le moteur servo
/*
* Ce code ESP32 a été développé par newbiely.fr
* Ce code ESP32 est mis à disposition du public sans aucune restriction.
* Pour des instructions complètes et des schémas de câblage, veuillez visiter:
* https://newbiely.fr/tutorials/esp32/esp32-rain-sensor-servo-motor
*/
#include <ESP32Servo.h>
#define RAIN_SENSOR_PIN 25 // The ESP32 pin GPIO25 connected to the sound sensor
#define SERVO_PIN 26 // The ESP32 pin GPIO26 connected to the relay
Servo servo; // create servo object to control a servo
// variables will change:
int angle = 0; // the current angle of servo motor
int prev_rain_state; // the previous state of rain sensor
int rain_state; // the current state of rain sensor
void setup() {
Serial.begin(9600); // initialize serial
pinMode(RAIN_SENSOR_PIN, INPUT); // set ESP32 pin to input mode
servo.attach(SERVO_PIN); // attaches the servo on pin 9 to the servo object
servo.write(angle);
rain_state = digitalRead(RAIN_SENSOR_PIN);
}
void loop() {
prev_rain_state = rain_state; // save the last state
rain_state = digitalRead(RAIN_SENSOR_PIN); // read new state
if (rain_state == LOW && prev_rain_state == HIGH) { // pin state change: LOW -> HIGH
Serial.println("Rain detected!");
servo.write(90);
}
else
if (rain_state == HIGH && prev_rain_state == LOW) { // pin state change: HIGH -> LOW
Serial.println("Rain stopped!");
servo.write(0);
}
}
Étapes rapides
- Si c'est la première fois que vous utilisez un ESP32, consultez Installation du logiciel ESP32..
- Faites le câblage comme sur l'image ci-dessus.
- Connectez la carte ESP32 à votre PC via un câble micro USB.
- Ouvrez Arduino IDE sur votre PC.
- Sélectionnez la bonne carte ESP32 (par exemple, ESP32 Dev Module) et le port COM.
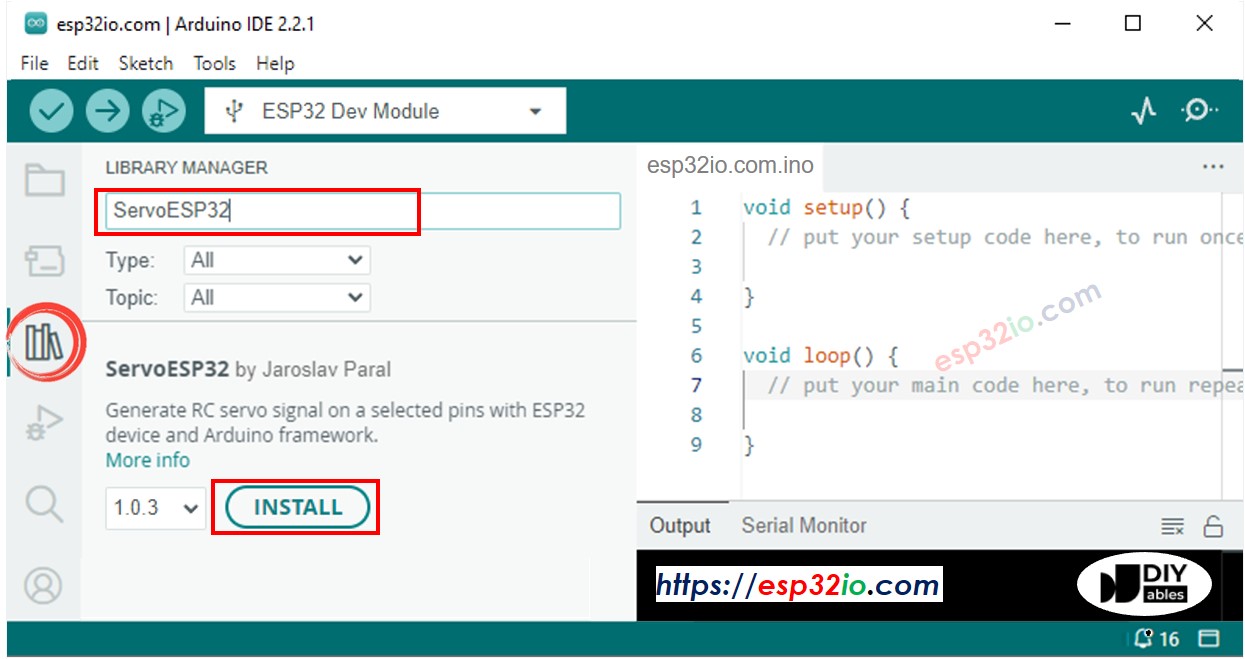
- Cliquez sur l'icône Libraries dans la barre latérale gauche de l'Arduino IDE.
- Tapez ESP32Servo dans la boîte de recherche, puis recherchez la bibliothèque servo de Kevin Harrington,John K. Bennett.
- Cliquez sur le bouton Install pour installer la bibliothèque de moteur servo pour ESP32.
- Copiez le code ci-dessus et ouvrez-le avec l'IDE Arduino
- Cliquez sur le bouton Upload de l'IDE Arduino pour téléverser le code vers l'ESP32
- Déplacez votre main devant le capteur
- Observez le changement du moteur servo