ESP32 - Capteur de son - Moteur servo
Dans ce tutoriel, nous explorerons comment utiliser le capteur sonore pour contrôler un moteur servo. Plus précisément, nous plongerons dans deux applications passionnantes :
- Interrupteur sonore : Lorsqu'un son est détecté (par exemple un coup), l'ESP32 fait tourner le servo-moteur à 90 degrés s'il est à 0 degré, et à 0 degré s'il est à 90 degrés.
- Relais activé par le son : Lors de la détection d'un son, l'ESP32 fait tourner le servo-moteur à 90 degrés pendant une période de temps spécifique, puis le ramène à 0 degré.
Préparation du matériel
Ou vous pouvez acheter les kits suivants:
| 1 | × | Kit de Démarrage DIYables ESP32 (ESP32 inclus) | |
| 1 | × | Kit de Capteurs DIYables (18 capteurs/écrans) |
Note d'achat: Si vous utilisez plusieurs servomoteurs, nous recommandons d'utiliser le PCA9685 16 Channel PWM Servo Driver Module pour économiser les broches du MCU et faciliter le câblage.
À propos du servomoteur et du capteur sonore
Si vous ne connaissez pas le moteur servo et le capteur sonore (brochage, fonctionnement, programmation...), renseignez-vous sur ces derniers dans les tutoriels suivants :
Diagramme de câblage
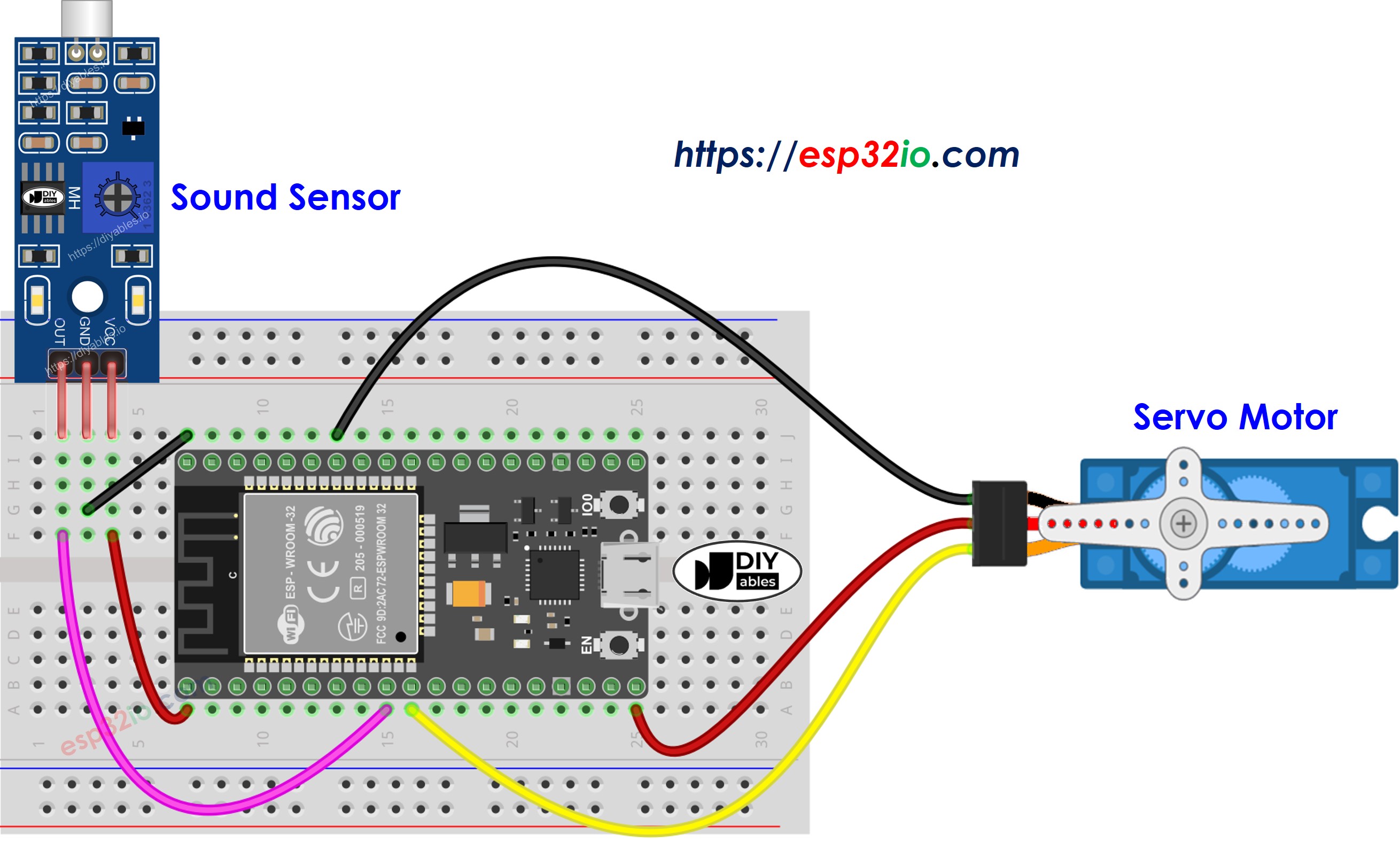
Cette image a été créée avec Fritzing. Cliquez pour agrandir l'image.
Si vous ne savez pas comment alimenter l'ESP32 et d'autres composants, consultez les instructions dans le tutoriel suivant : Comment alimenter l'ESP32..
Code ESP32 - L'interrupteur sonore bascule l'angle du moteur servo
Le code ci-dessous bascule l'angle du moteur servo entre 0 et 90 degrés à chaque fois que le son est détecté.
Étapes rapides
- Si c'est la première fois que vous utilisez ESP32, consultez Installation du logiciel ESP32..
- Faites le câblage comme sur l'image ci-dessus.
- Connectez la carte ESP32 à votre PC via un câble micro USB.
- Ouvrez Arduino IDE sur votre PC.
- Sélectionnez la bonne carte ESP32 (par exemple, ESP32 Dev Module) et le port COM.
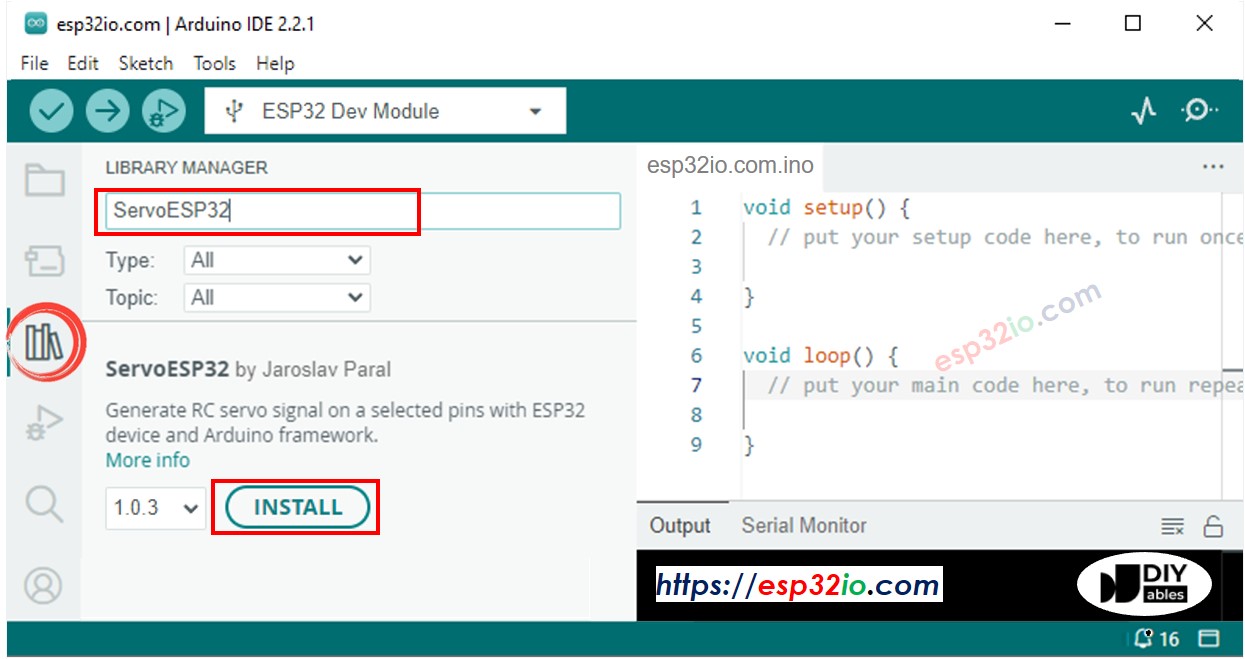
- Cliquez sur l'icône Libraries dans la barre latérale gauche de l'Arduino IDE.
- Tapez ESP32Servo dans la zone de recherche, puis recherchez la bibliothèque servo de Kevin Harrington,John K. Bennett.
- Cliquez sur le bouton Install pour installer la bibliothèque du moteur servo pour ESP32.
- Connectez l'ESP32 au PC via le câble USB
- Ouvrez l'Arduino IDE, sélectionnez la bonne carte et le bon port
- Copiez le code ci-dessus et ouvrez-le avec l'Arduino IDE
- Cliquez sur le bouton Upload dans l'Arduino IDE pour charger le code sur l'ESP32
- Claquez des mains devant le capteur sonore
- Observez le changement du moteur servo
Code ESP32 - Servomoteur activé par le son pour une durée déterminée
Le code ci-dessous fait tourner le moteur servo à 90 degrés pendant une période lorsque un son est détecté. Après cette période, le moteur servo est ramené à 0 degré.
Veuillez noter que le code mentionné ci-dessus utilise la fonction delay() par simplicité. Cependant, si vous incorporez du code supplémentaire, il peut se bloquer pendant le temps de délai. Pour remédier à cela, le code suivant met en œuvre une approche non bloquante en utilisant la fonction millis() au lieu de delay pour éviter le blocage.