ESP32 - Capteur de mouvement - Moteur servo
Ce tutoriel vous explique comment utiliser l'ESP32 avec le capteur de mouvement HC-SR501 et un moteur servo. En détail :
- L'ESP32 fait automatiquement pivoter le moteur servo à 90 degrés si un mouvement est détecté,
- L'ESP32 fait automatiquement revenir le moteur servo à 0 degré si aucun mouvement n'est détecté.
Préparation du matériel
Ou vous pouvez acheter les kits suivants:
| 1 | × | Kit de Démarrage DIYables ESP32 (ESP32 inclus) | |
| 1 | × | Kit de Capteurs DIYables (18 capteurs/écrans) |
Note d'achat: Si vous utilisez plusieurs servomoteurs, nous recommandons d'utiliser le PCA9685 16 Channel PWM Servo Driver Module pour économiser les broches du MCU et faciliter le câblage.
À propos du servomoteur et du capteur de mouvement.
Nous disposons de tutoriels spécifiques sur le moteur servo et le capteur de mouvement. Chaque tutoriel contient des informations détaillées et des instructions étape par étape sur le brochage du matériel, le principe de fonctionnement, la connexion des fils à l'ESP32, le code ESP32... Apprenez-en plus à leur sujet aux liens suivants :
Diagramme de câblage
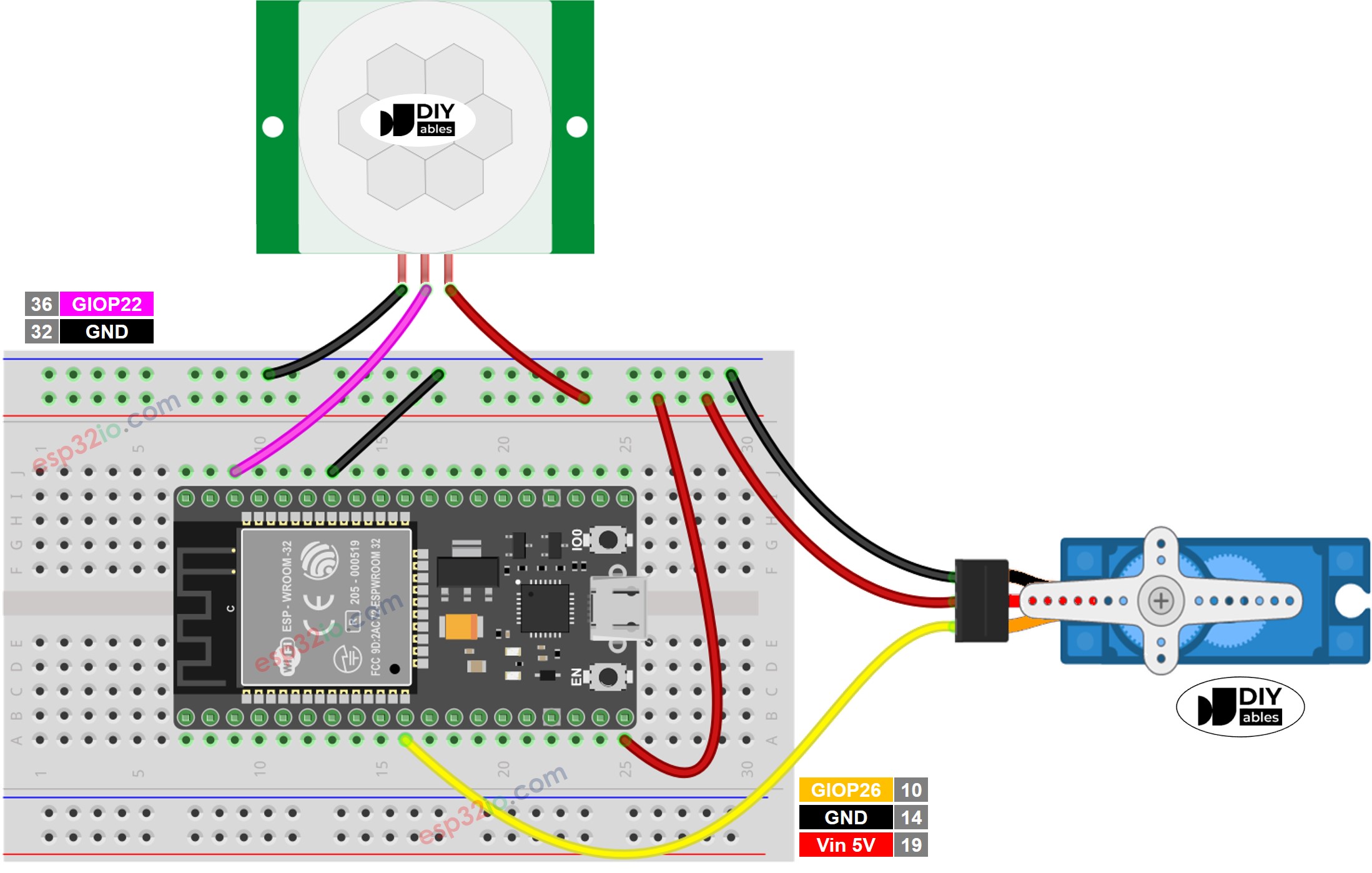
Cette image a été créée avec Fritzing. Cliquez pour agrandir l'image.
Si vous ne savez pas comment alimenter l'ESP32 et d'autres composants, consultez les instructions dans le tutoriel suivant : Comment alimenter l'ESP32..
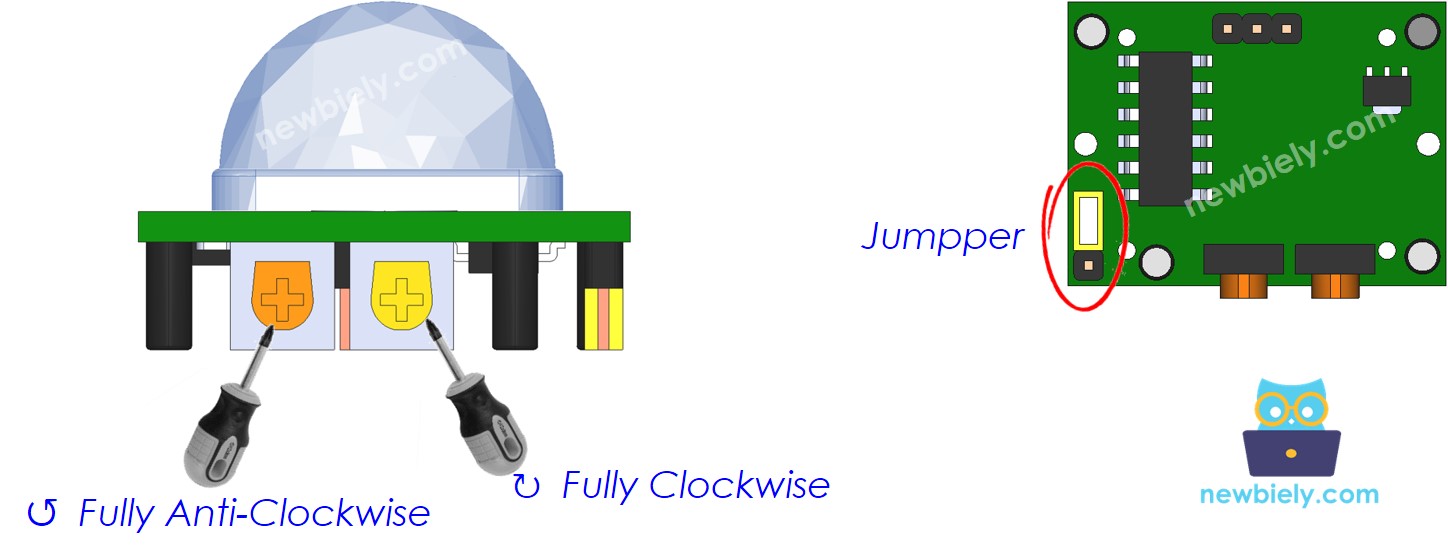
Configuration Initiale
| Detection Range Adjuster | Fully screw it in the clockwise direction. |
| Time Delay Adjuster | Fully screw it in the anti-clockwise direction. |
| Repeat Trigger Selector | Put jumper like the below image. |
Code ESP32 - Un capteur de mouvement contrôle un moteur servo
Étapes rapides
- Si c'est la première fois que vous utilisez l'ESP32, consultez Installation du logiciel ESP32..
- Faites le câblage comme sur l'image ci-dessus.
- Connectez la carte ESP32 à votre PC via un câble micro USB.
- Ouvrez Arduino IDE sur votre PC.
- Sélectionnez la bonne carte ESP32 (par exemple, ESP32 Dev Module) et le port COM.
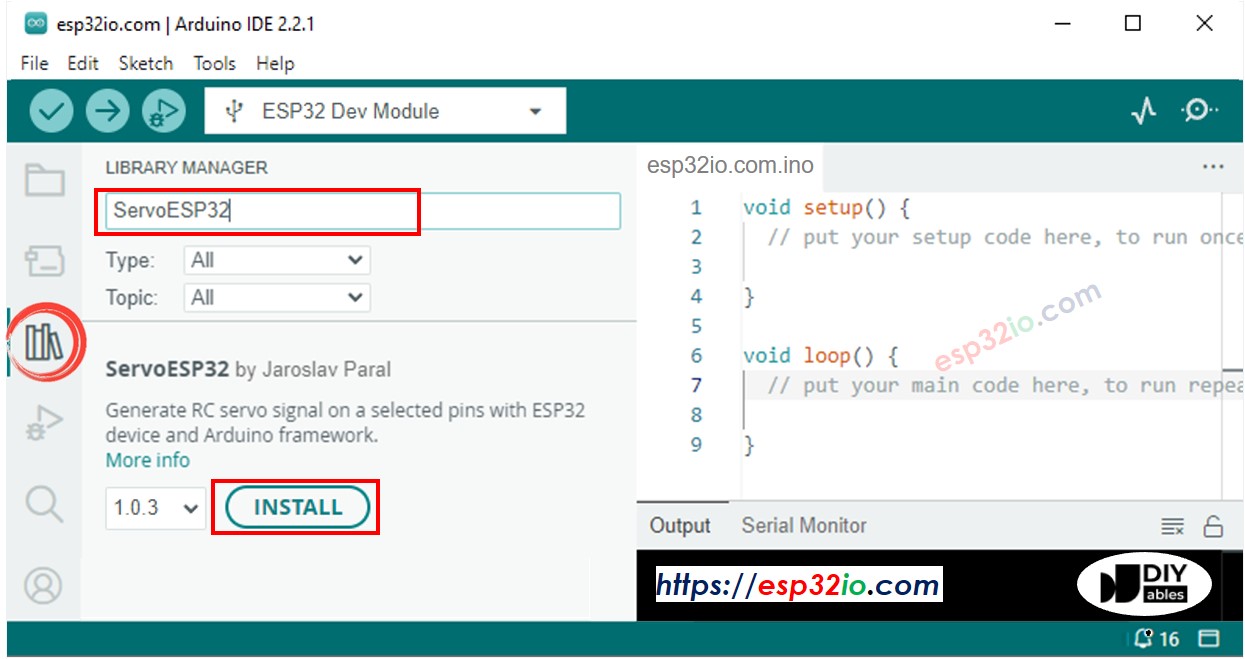
- Cliquez sur l'icône Libraries dans la barre gauche de l'Arduino IDE.
- Tapez ESP32Servo dans la boîte de recherche, puis recherchez la bibliothèque servo de Kevin Harrington,John K. Bennett.
- Cliquez sur le bouton Install pour installer la bibliothèque du moteur servo pour ESP32.
- Copiez le code ci-dessus et collez-le dans l'IDE Arduino.
- Compilez et téléchargez le code vers la carte ESP32 en cliquant sur le bouton Upload dans l'IDE Arduino.
- Déplacez votre main devant le capteur.
- Observez le changement du moteur servo.