Exemple de rotateur Arduino UNO R4 WiFi et Bluetooth - Tutoriel sur le contrôle de l'angle via BLE
Vue d'ensemble
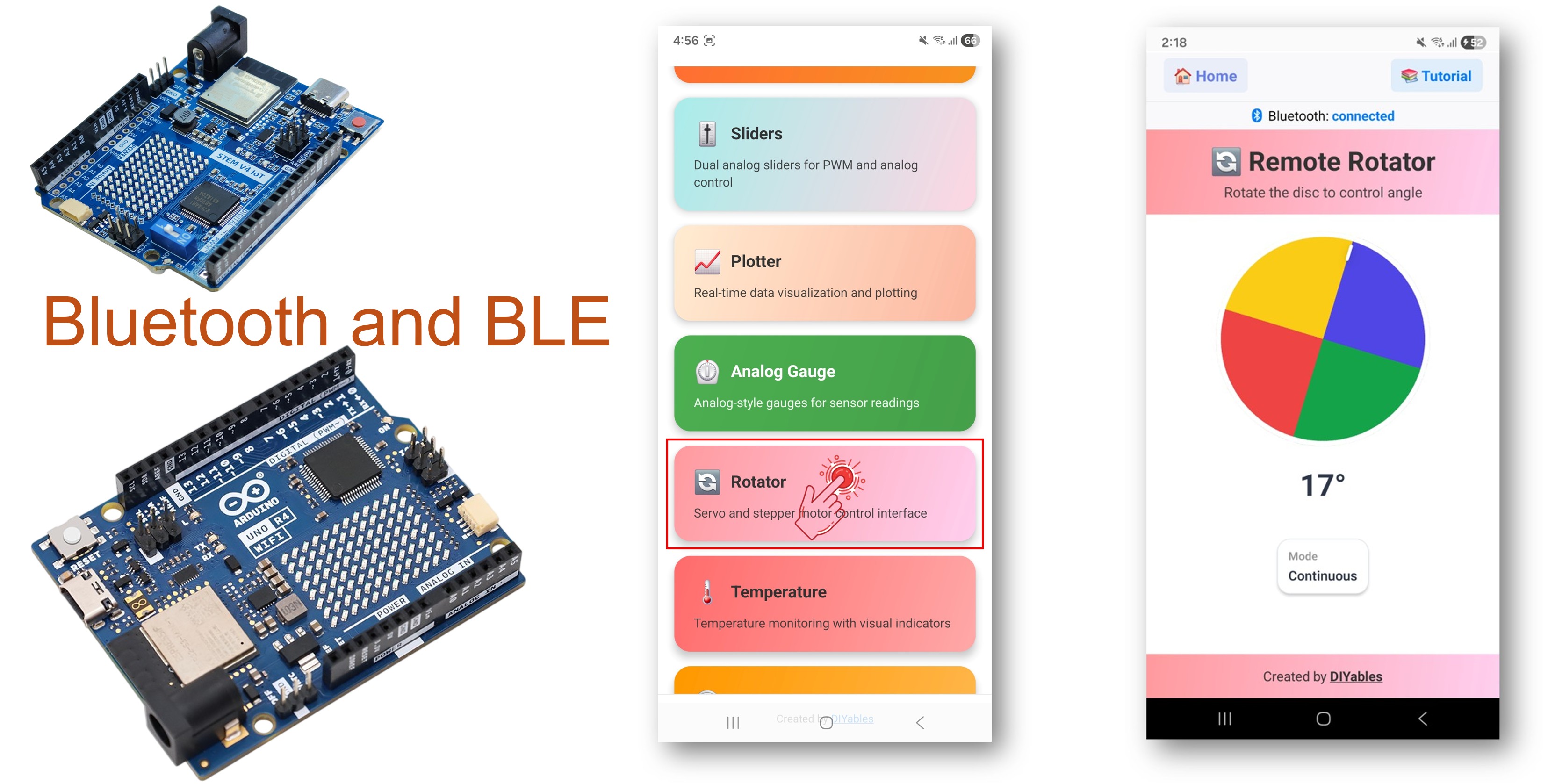
L'exemple Bluetooth Rotator fournit un contrôle de position angulaire via l'application DIYables Bluetooth STEM. Conçu pour Arduino UNO R4 WiFi utilisant BLE (Bluetooth Low Energy) pour contrôler les angles de rotation et les servomoteurs sans fil depuis votre smartphone. Prend en charge les modes de rotation à portée limitée et de rotation continue. Parfait pour le contrôle de servomoteurs, la robotique, les mécanismes pan-tilt et le positionnement angulaire.
Note: L'Arduino UNO R4 WiFi ne prend en charge que le BLE (Bluetooth Low Energy). Il ne prend pas en charge le Bluetooth classique. L'application Bluetooth de DIYables prend en charge à la fois le BLE et le Bluetooth classique sur Android, et le BLE sur iOS. Puisque cette carte utilise le BLE, l'application fonctionne sur Android et iOS.
Fonctionnalités
- Mode Limité: Définir la plage d'angles minimale et maximale (par exemple, 0° à 180°)
- Mode Continu: Rotation continue sur 360°
- Angle en temps réel: Recevoir les mises à jour d'angle pendant que l'utilisateur tourne
- Intégration du servomoteur: Contrôle direct du servomoteur
- Synchronisation de l'angle initial: Envoyer la position actuelle lors de la connexion
- Fonctionne sur Android et iOS: BLE est pris en charge sur les deux plateformes
- Aucun appairage requis: BLE se connecte automatiquement sans jumelage manuel
Préparation du matériel
Ou vous pouvez acheter les kits suivants:
| 1 | × | Kit de Démarrage DIYables STEM V4 IoT (Arduino inclus) | |
| 1 | × | Kit de Capteurs DIYables (18 capteurs/écrans) |
Note d'achat: Si vous utilisez plusieurs servomoteurs, nous recommandons d'utiliser le PCA9685 16 Channel PWM Servo Driver Module pour économiser les broches du MCU et faciliter le câblage.
Code Arduino UNO R4 WiFi
Étapes rapides
Suivez ces instructions étape par étape :
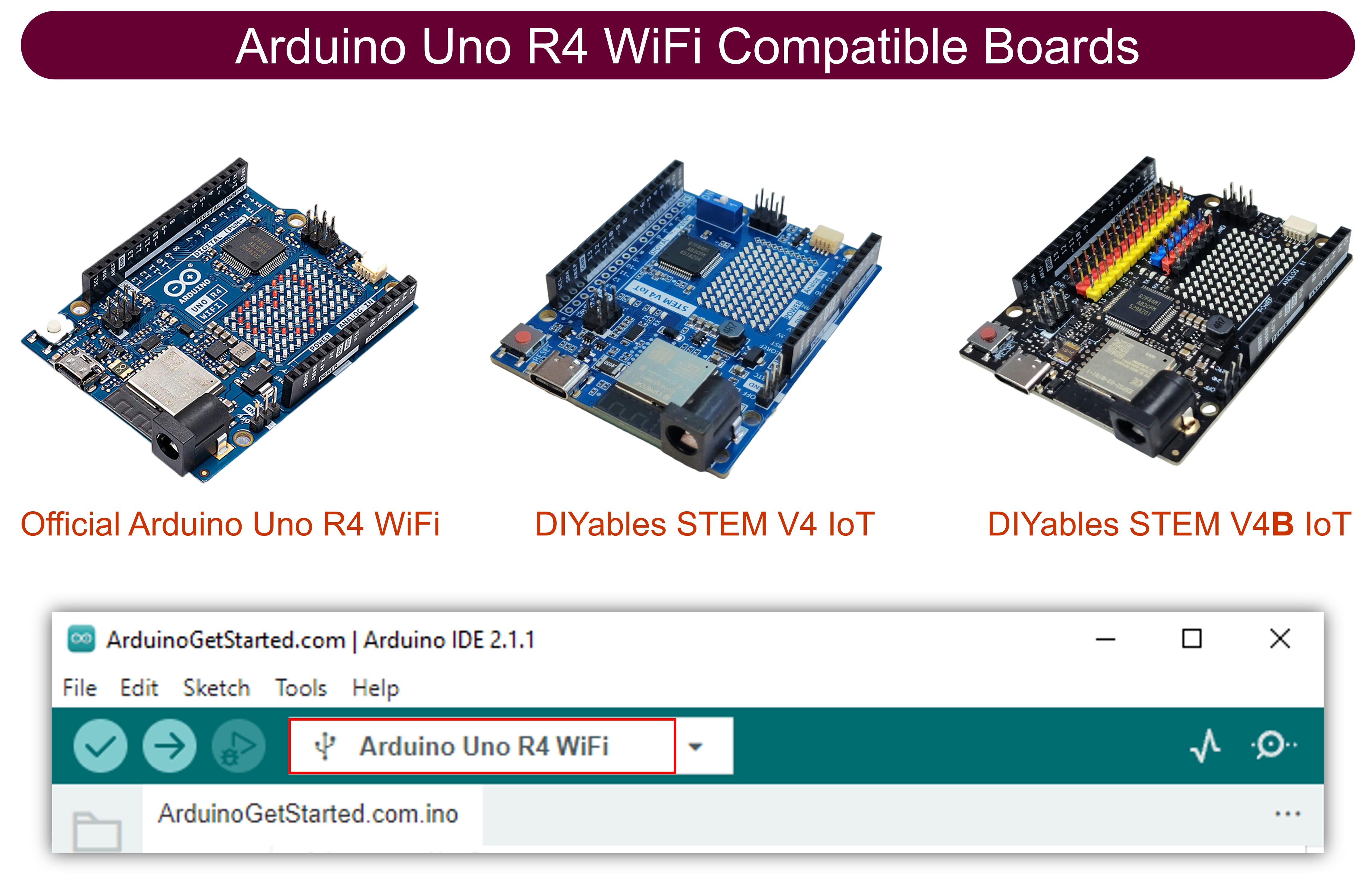
- Si c'est la première fois que vous utilisez l'Arduino UNO R4 WiFi, consultez le Arduino UNO R4 - Installation du logiciel..
- Connectez la carte Arduino UNO R4 WiFi à votre ordinateur à l'aide d'un câble USB.
- Lancez l'IDE Arduino sur votre ordinateur.
- Sélectionnez la carte Arduino UNO R4 WiFi et le port COM approprié.
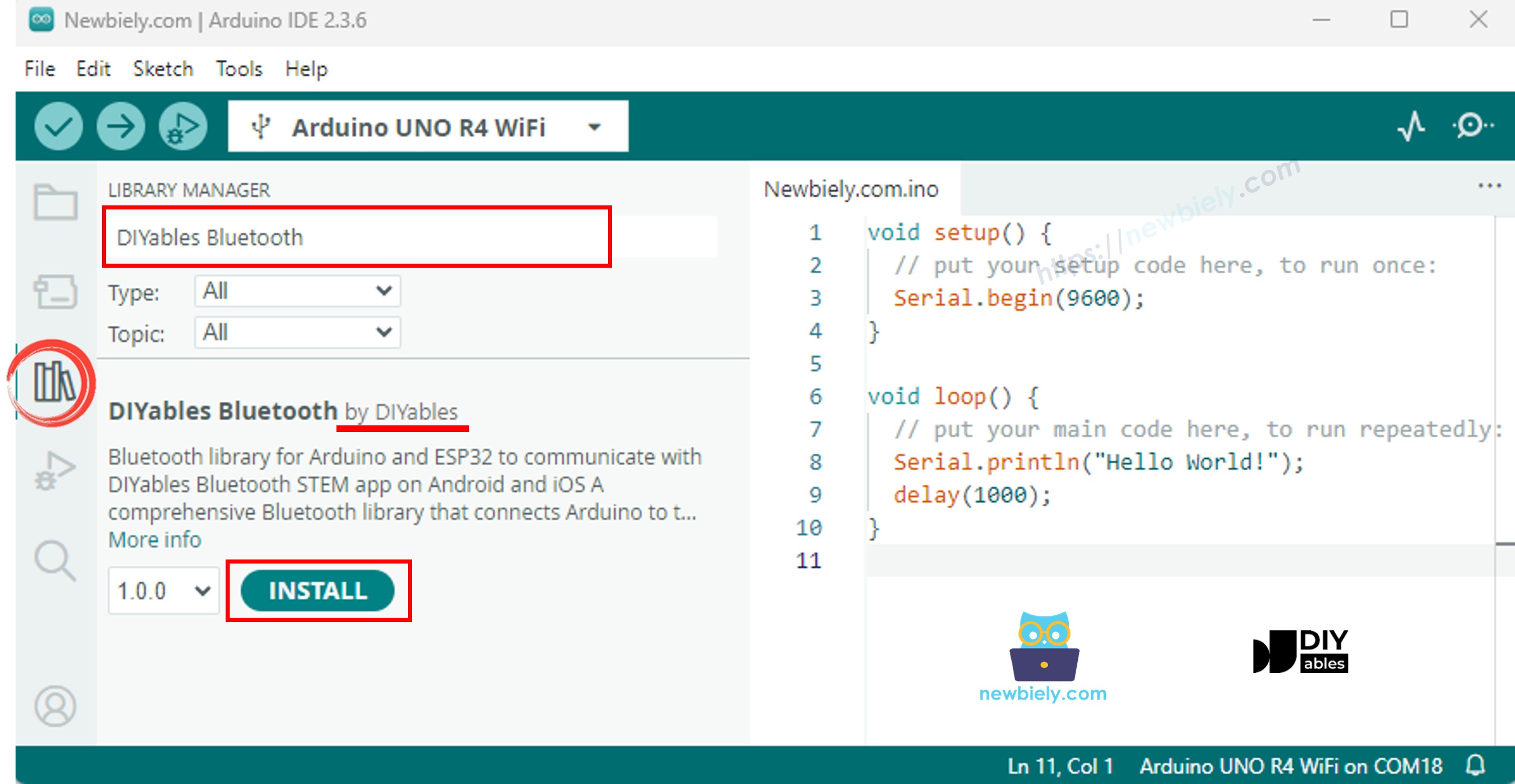
- Accédez à l'icône Libraries dans la barre de gauche de l'IDE Arduino.
- Recherchez "DIYables Bluetooth", puis trouvez la bibliothèque DIYables Bluetooth publiée par DIYables.
- Cliquez sur le bouton Install pour installer la bibliothèque.
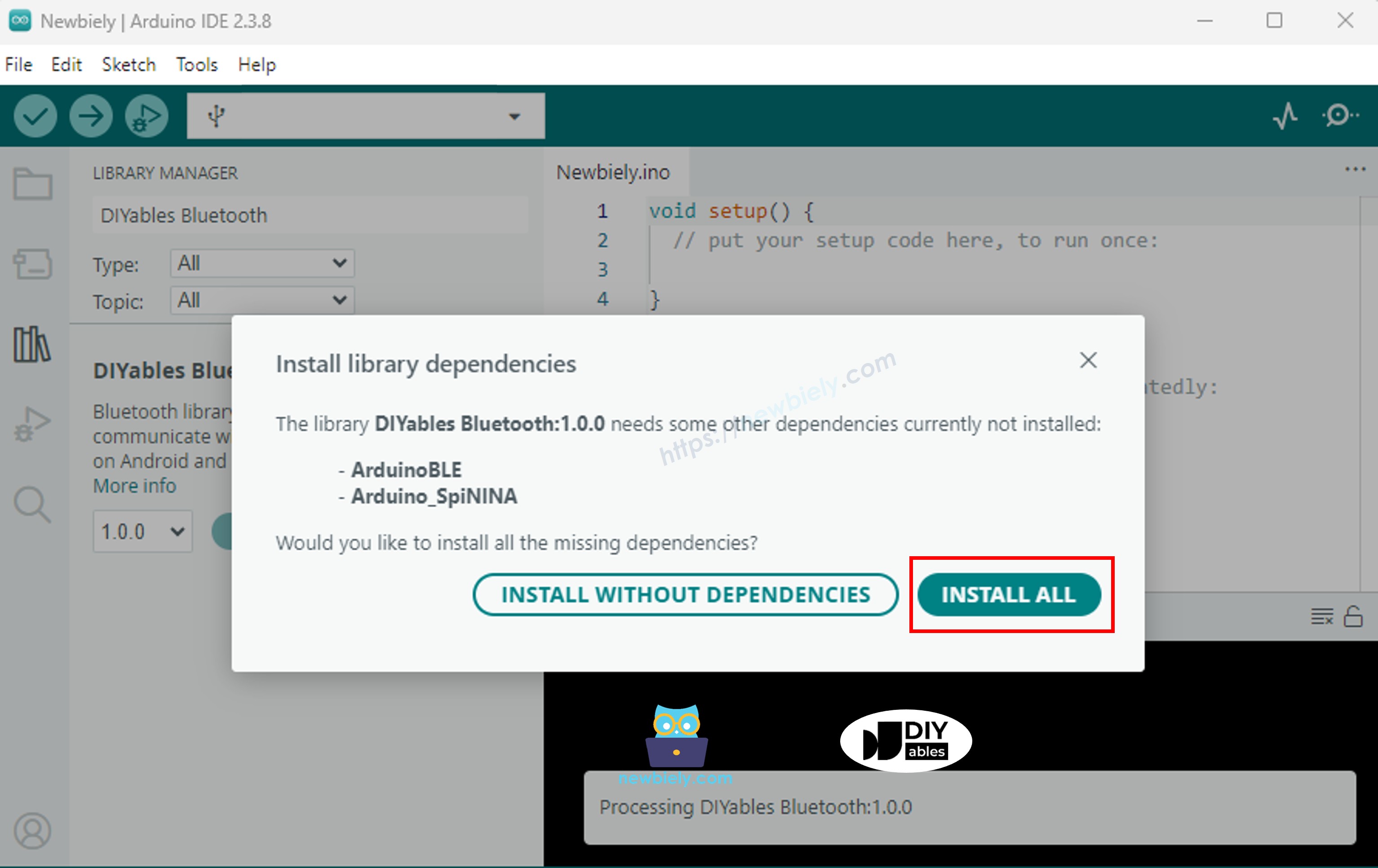
- Il vous sera demandé d'installer d'autres dépendances de bibliothèque.
- Cliquez sur le bouton Install All pour installer toutes les dépendances de bibliothèque.
Code BLE
- Dans l'IDE Arduino, allez dans Fichier Exemples DIYables Bluetooth ArduinoBLE_Rotator l'exemple, ou copiez le code ci-dessus et collez-le dans l'éditeur de l'IDE Arduino
- Cliquez sur le bouton Upload dans l'IDE Arduino pour téléverser le code vers l'Arduino UNO R4 WiFi
- Ouvrez le Moniteur série
- Vérifiez le résultat sur le Moniteur série. Il ressemble à ce qui suit :
Application mobile
Remarque : L'application Bluetooth DIYables prend en charge à la fois le BLE et le Bluetooth classique sur Android, et le BLE sur iOS. Comme l'Arduino UNO R4 WiFi utilise le BLE, l'application fonctionne sur les deux plateformes Android et iOS. Aucune association manuelle n'est nécessaire pour le BLE — il suffit de scanner et de se connecter.
- Ouvrez l'application Bluetooth DIYables
- Lors de l'ouverture de l'application pour la première fois, elle demandera des autorisations. Veuillez accorder les éléments suivants :
- Périphériques à proximité autorisation (Android 12+) / Bluetooth autorisation (iOS) - nécessaire pour rechercher et se connecter à des périphériques Bluetooth
- Localisation autorisation (Android 11 et versions ci-dessous uniquement) - requise par les anciennes versions d'Android pour rechercher des périphériques BLE
- Assurez-vous que Bluetooth est activé sur votre téléphone
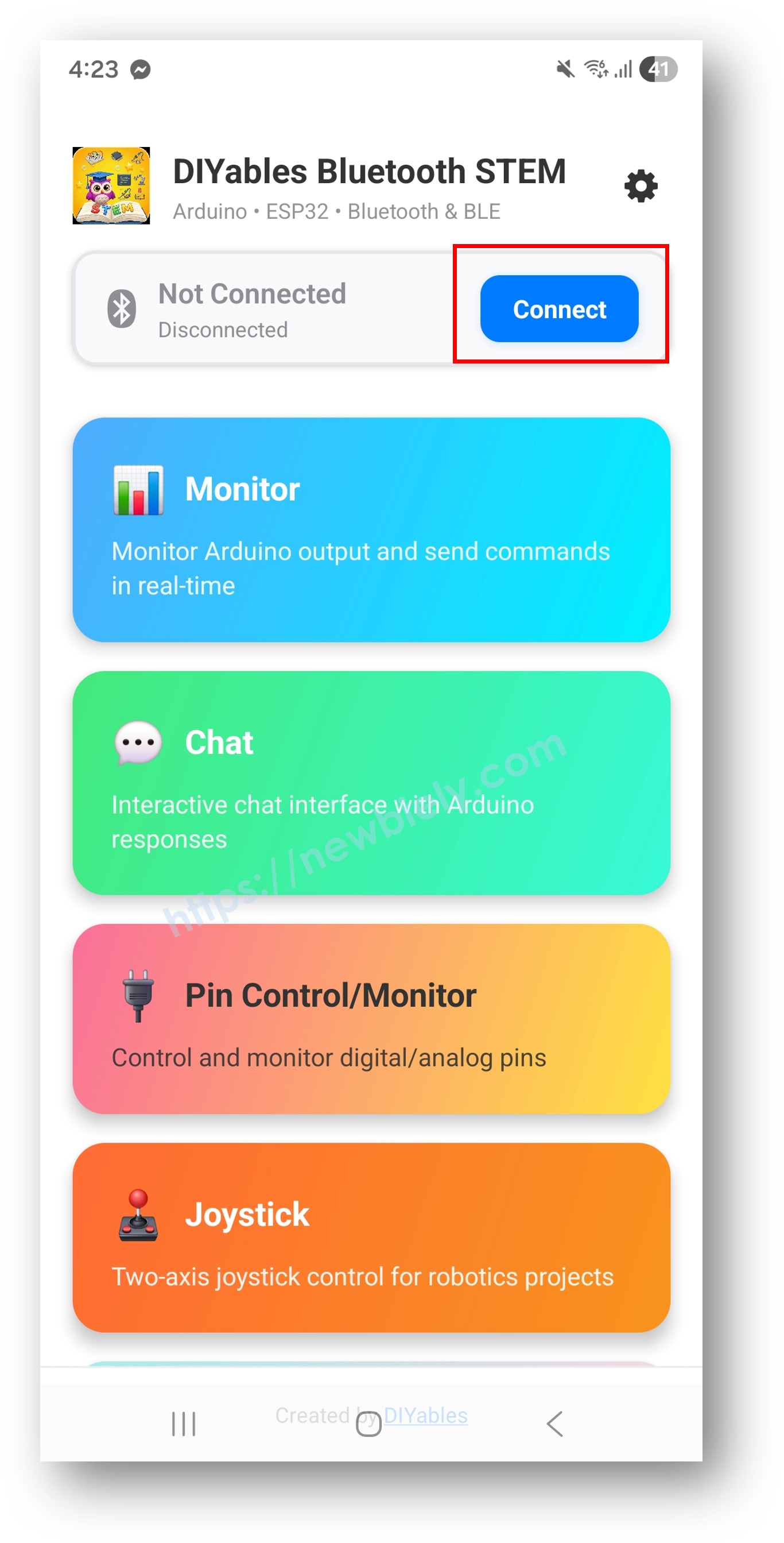
- À l'écran d'accueil, touchez le Connecter bouton. L'application va scanner les périphériques BLE.
- Trouvez et touchez "Arduino_Rotator" dans les résultats du balayage pour vous connecter.
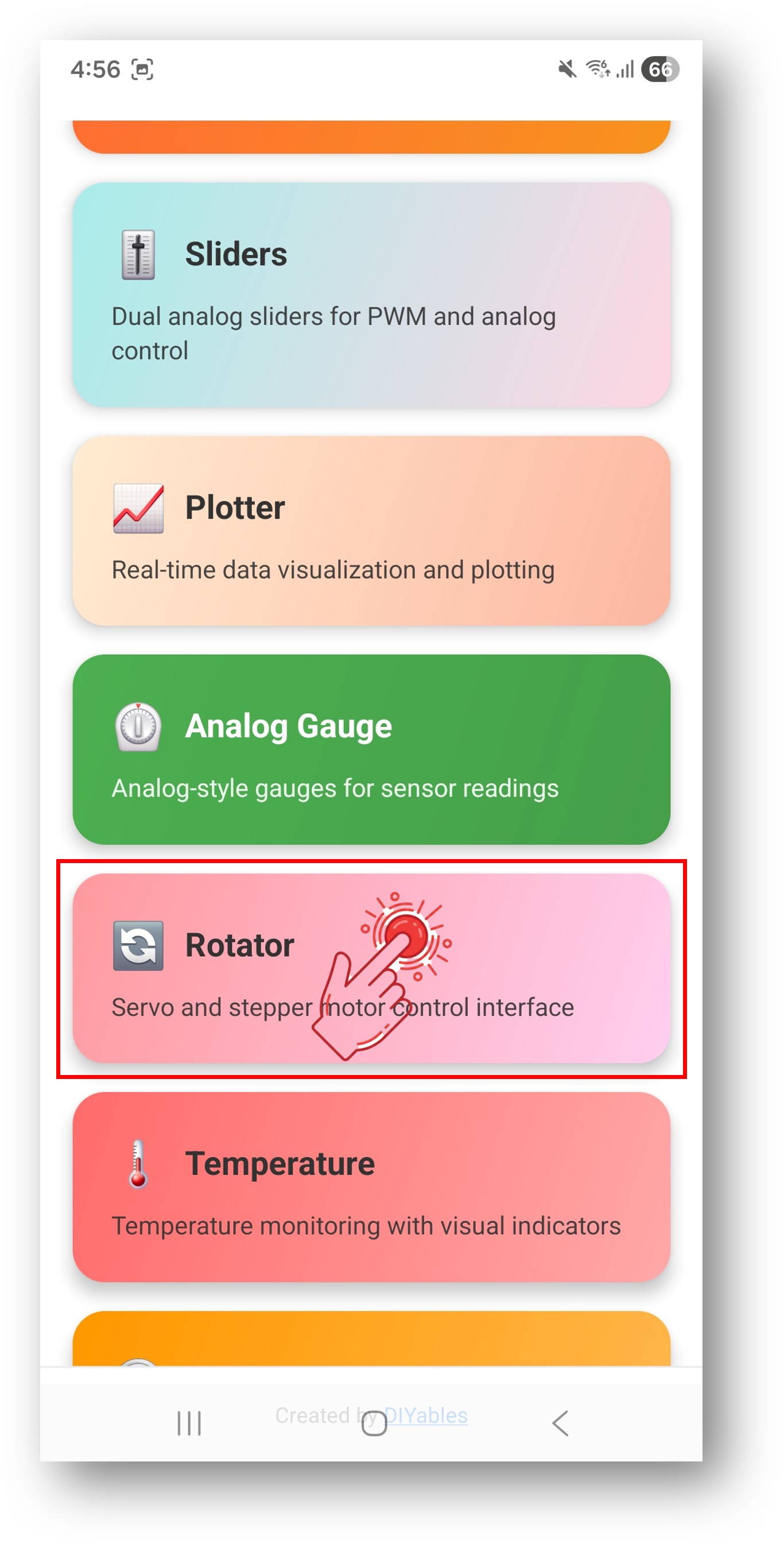
- Une fois connecté, l'application retourne automatiquement à l'écran d'accueil. Sélectionnez l'application Rotator dans le menu des applications.
Remarque: Vous pouvez toucher l'icône des paramètres sur l'écran d'accueil pour masquer/afficher les applications sur l'écran d'accueil. Pour plus de détails, consultez le Manuel d'utilisation de l'application DIYables Bluetooth.
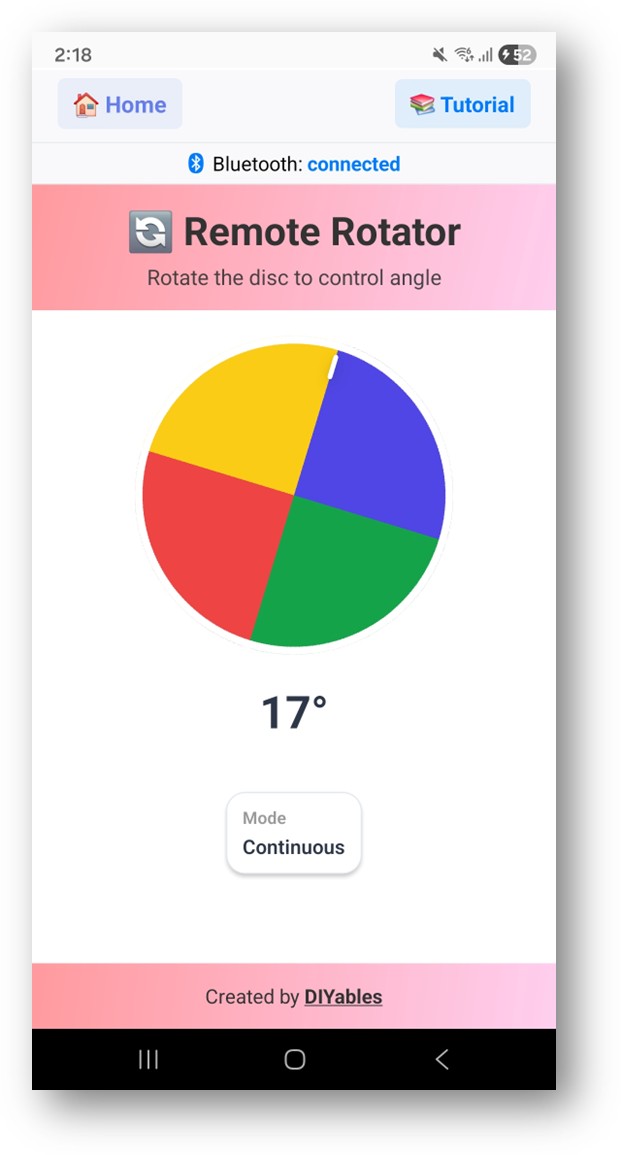
- Vous verrez un cadran rotatif affichant de 0° à 180°.
- Tournez le cadran pour envoyer des valeurs d'angle à l'Arduino.
Regardez maintenant le moniteur série dans l'IDE Arduino. Vous verrez :
Personnalisation créative - Adaptez le code à votre projet
Modes de rotation
Gérer les changements d'angle
Envoyer l'angle actuel
Exemples de programmation
Contrôle du servomoteur
Monture de caméra panoramique et basculante
Dépannage
Problèmes courants
- Impossible de trouver l'appareil dans l'application
- Assurez-vous que l'Arduino UNO R4 WiFi est allumé et que le sketch est téléversé
- Assurez-vous que le Bluetooth de votre téléphone est activé
- Sur Android 11 et les versions antérieures, activez également les services de localisation
2. Le servomoteur ne répond pas
- Vérifiez que le servo est câblé sur la bonne broche
- Vérifiez que la bibliothèque Servo est incluse et que la fonction attach() est appelée
- Veillez à disposer d'une alimentation suffisante pour le servo
3. La plage d'angles semble incorrecte
- Vérifiez les valeurs minimales et maximales dans le constructeur
- Assurez-vous d'utiliser ROTATOR_MODE_LIMITED pour une plage bornée
4. La molette se réinitialise à 0 lors de la reconnexion
- Envoyez l'angle actuel en utilisant sendAngle() lorsque l'appareil se reconnecte
- Le code d'exemple gère cela dans le rappel onRotatorAngle
5. Échec du téléversement ou carte non reconnue
- Installer le dernier package de cartes Arduino UNO R4 via le Gestionnaire de cartes
- Essayez un autre câble USB ou un autre port
Idées de projets
- Contrôleur de servomoteur
- Support caméra pan-tilt
- Contrôle des articulations du bras robotique
- Commande de thermostat à cadran
- Affichage de la boussole et du cap
Prochaines étapes
Après avoir maîtrisé l'exemple Bluetooth Rotator, essayez :
- Curseur Bluetooth - Pour le contrôle de valeur linéaire
- Joystick Bluetooth - Pour le contrôle de position en 2D
- Jauge analogique Bluetooth - Pour le retour visuel
- Applications Bluetooth multiples - Combiner le rotateur avec d'autres applications
Aide
Pour obtenir de l'aide supplémentaire :
- Vérifiez la documentation de référence de l'API
- Visitez Tutoriels DIYables
- Forums de la communauté Arduino