Arduino UNO R4 - Joystick - Servomoteur
Dans ce guide, nous apprendrons comment utiliser un Arduino UNO R4 et un joystick pour contrôler deux servomoteurs ou un kit pan-tilt.
Un joystick possède deux potentiomètres, placés à des angles droits les uns par rapport aux autres, connus sous les noms d'axes X et Y. Ces potentiomètres produisent des signaux, appelés valeurs X et Y, qui sortent des broches VRX et VRY du joystick. Nous utilisons ces signaux pour contrôler deux servomoteurs : la valeur X déplace le servomoteur n° 1 et la valeur Y déplace le servomoteur n° 2. Lorsque vous les utilisez avec un kit pan-tilt, les deux servomoteurs fonctionnent ensemble pour se déplacer dans les trois dimensions.
Il y a deux exemples de la façon dont l'application peut être utilisée :
- Cas d'utilisation 1 : Les servomoteurs tournent en fonction de la façon dont le joystick est déplacé:
- Les angles de déplacement des servomoteurs correspondent aux déplacements horizontaux (X) et verticaux (Y) du joystick.
- Relâcher le joystick fait revenir le joystick et les servomoteurs à leur position de départ.
- Cas d'utilisation 2 : Contrôlez les servomoteurs avec le joystick pour différentes directions:
- Pousser le joystick vers la gauche fait tourner le servomoteur n°1 dans le sens des aiguilles d'une montre.
- Pousser le joystick vers la droite fait tourner le servomoteur n°1 dans le sens inverse des aiguilles d'une montre.
- Pousser le joystick vers le haut fait tourner le servomoteur n°2 dans le sens des aiguilles d'une montre.
- Pousser le joystick vers le bas fait tourner le servomoteur n°2 dans le sens inverse des aiguilles d'une montre.
- Relâcher le joystick ne réinitialise pas les servomoteurs.
- En appuyant sur le bouton du joystick, les servomoteurs se réinitialisent au centre.
- Si c'est la première fois que vous utilisez l'Arduino Uno R4 WiFi/Minima, reportez-vous au tutoriel sur Arduino UNO R4 - Installation du logiciel..
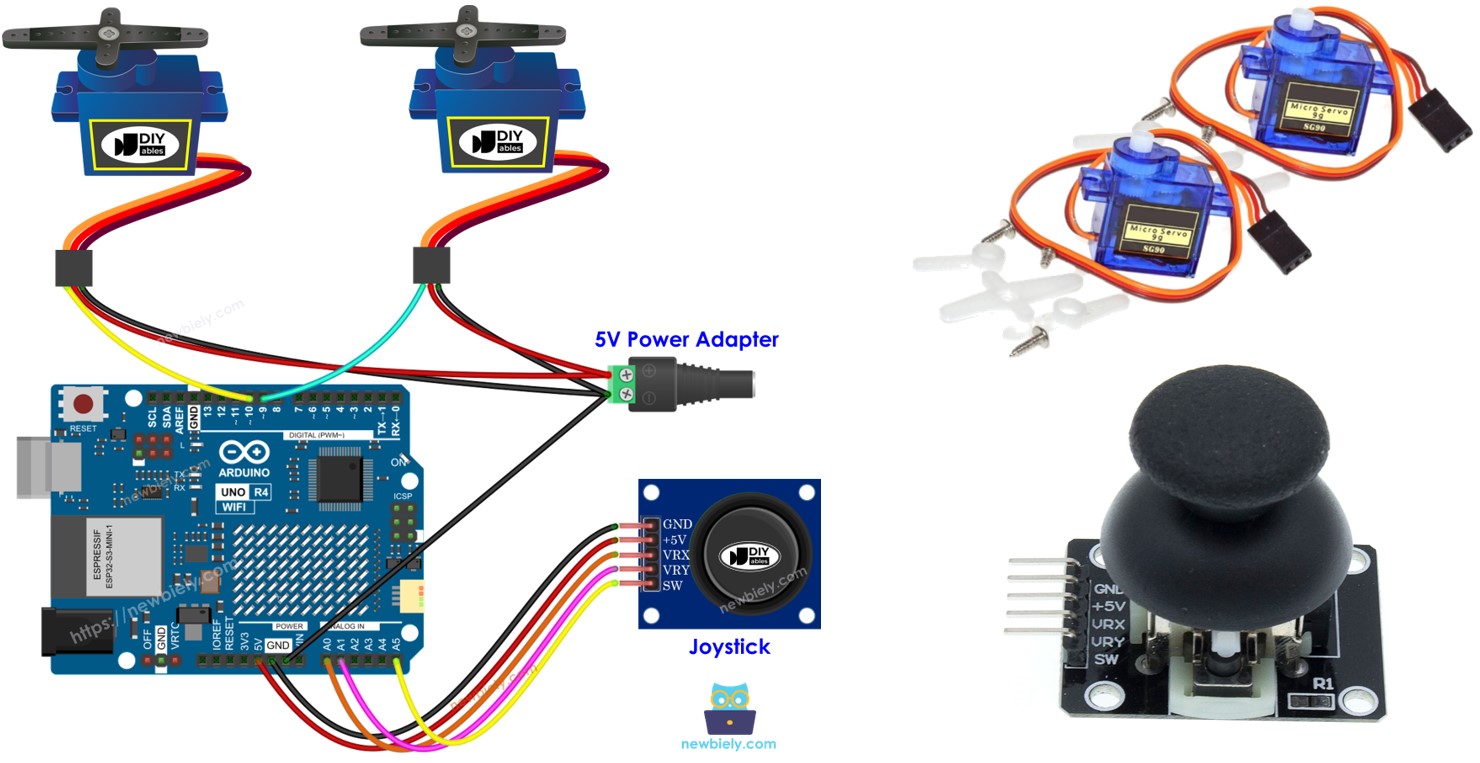
- Connectez l'Arduino Uno R4 au moteur servo et au joystick selon le schéma fourni.
- Connectez la carte Arduino Uno R4 à votre ordinateur à l'aide d'un câble USB.
- Lancez l'IDE Arduino sur votre ordinateur.
- Sélectionnez la carte Arduino Uno R4 appropriée (par exemple Arduino Uno R4 WiFi) et le port COM.
- Copiez le code fourni et ouvrez-le dans l'IDE Arduino.
- Cliquez sur le bouton Upload dans l'IDE Arduino pour transférer le code vers votre Arduino UNO R4.
- Ouvrez le Moniteur Série.
- Déplacez le joystick dans n'importe quelle direction.
- Observez la rotation du servomoteur.
- Vérifiez le résultat sur le Moniteur Série.
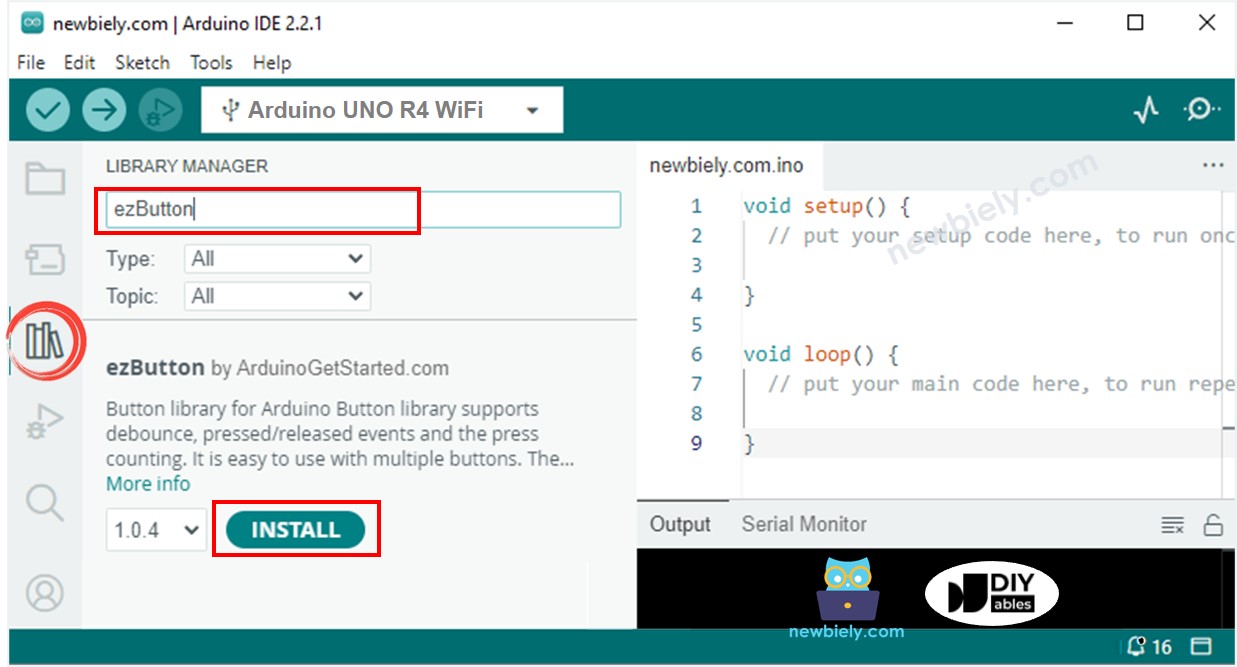
- Accédez à l'icône Libraries sur le côté gauche de l'IDE Arduino.
- Saisissez ezButton dans la zone de recherche, et recherchez la bibliothèque de boutons par ArduinoGetStarted.com.
- Appuyez sur le bouton Install pour ajouter la bibliothèque ezButton.
- Copiez le code fourni et ouvrez-le dans l'IDE Arduino.
- Cliquez sur le bouton Upload dans l'IDE Arduino pour envoyer le code à l'Arduino UNO R4.
- Ouvrez le moniteur série.
- Déplacez le joystick dans n'importe quelle direction.
- Observez le servomoteur en rotation.
- Vérifiez les résultats sur le moniteur série.
Préparation du matériel
Ou vous pouvez acheter les kits suivants:
| 1 | × | Kit de Démarrage DIYables STEM V4 IoT (Arduino inclus) | |
| 1 | × | Kit de Capteurs DIYables (18 capteurs/écrans) |
Note d'achat: Si vous utilisez plusieurs servomoteurs, nous recommandons d'utiliser le PCA9685 16 Channel PWM Servo Driver Module pour économiser les broches du MCU et faciliter le câblage.
À propos du joystick et du servomoteur
Si vous n'êtes pas familier avec les détails des joysticks et des servomoteurs, tels que le brochage, le fonctionnement et la programmation, veuillez consulter les tutoriels suivants pour en savoir plus.
Diagramme de câblage
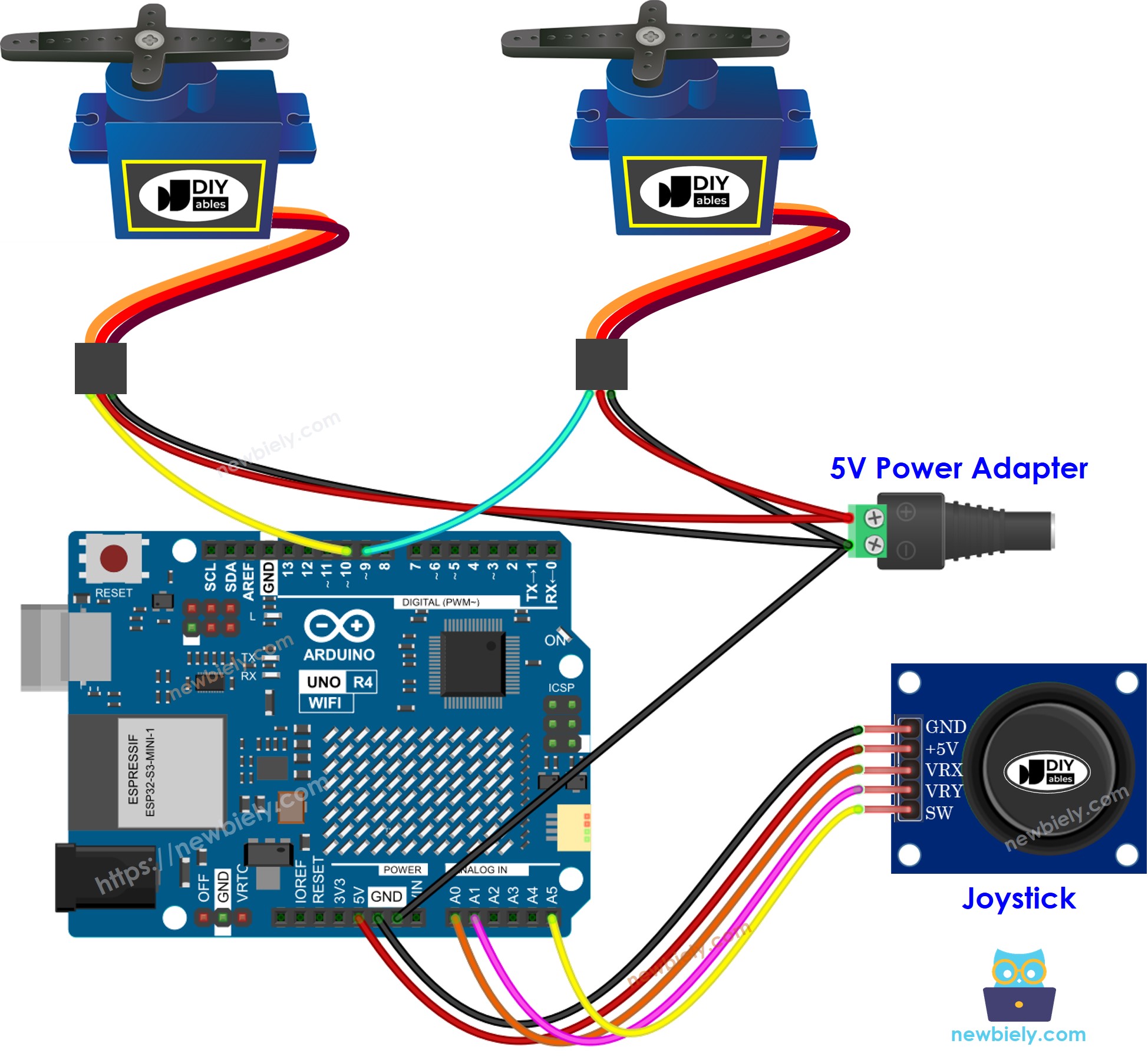
Cette image a été créée avec Fritzing. Cliquez pour agrandir l'image.
Code Arduino UNO R4
Arduino UNO R4 Code - Les servomoteurs tournent en fonction du déplacement du pouce du joystick
Étapes rapides
Suivez ces instructions étape par étape :

Code Arduino UNO R4 - Utiliser le joystick pour commander des servomoteurs
Étapes rapides
Explication du code
Vérifiez les explications fournies dans les commentaires du code source !