Arduino UNO R4 - Actionneur avec rétroaction
Ce tutoriel sur l'Arduino UNO R4 montre comment utiliser un actionneur linéaire à rétroaction dans vos projets de bricolage.
Dans la leçon précédente, nous avons utilisé un Arduino UNO R4 - Actionneur.. Ce type ne peut que s'allonger ou se rétracter, mais il ne nous indique pas sa position.
Maintenant, nous allons en apprendre davantage sur un actionneur linéaire à rétroaction. Il peut nous indiquer où il se trouve pendant qu'il se déplace, afin que nous puissions contrôler sa position exacte.
Dans ce guide simple, vous apprendrez :
- Comment fonctionne un actionneur linéaire à rétroaction – Ce qu'il est et ce qu'il fait
- Comment connaître sa position – Obtenez son emplacement en millimètres
- Comment le déplacer jusqu'à l'endroit exact – Contrôlez-le pour qu'il s'arrête exactement là où vous le souhaitez
Ce petit projet Arduino est adapté aux débutants. Suivez ce guide simple pour apprendre la programmation Arduino et créer un système de déplacement intelligent !
Préparation du matériel
Ou vous pouvez acheter les kits suivants:
| 1 | × | Kit de Démarrage DIYables STEM V4 IoT (Arduino inclus) | |
| 1 | × | Kit de Capteurs DIYables (18 capteurs/écrans) |
À propos de l'actuateur linéaire à rétroaction
Un actionneur linéaire à rétroaction est un type d'actionneur linéaire qui intègre un signal de rétroaction pour surveiller et contrôler sa position. Cette rétroaction provient d'un potentiomètre qui fournit une sortie en tension qui correspond à la position de l'actionneur.
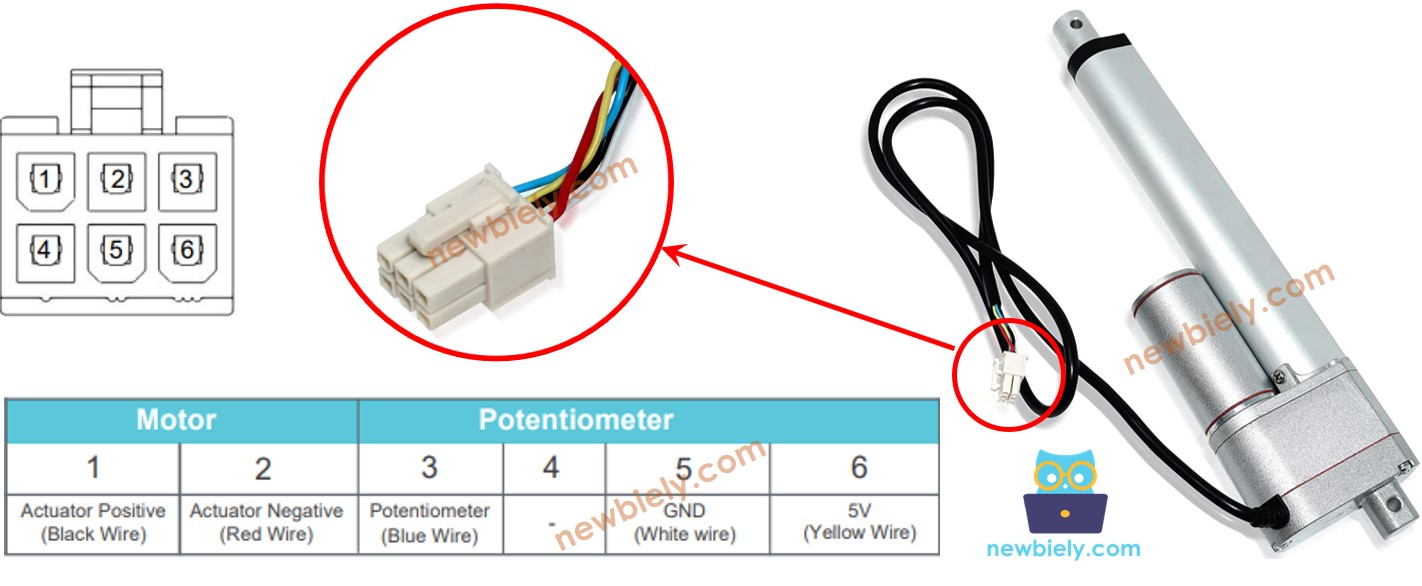
Schéma de brochage du vérin linéaire à rétroaction
Un actionneur linéaire à rétroaction comporte cinq fils :
- Fil d'alimentation positif de l'actionneur : Ce fil contrôle l'actionneur linéaire en utilisant une tension élevée (12 V, 24 V, 48 V).
- Fil 5 V : Ce fil se connecte au potentiomètre de rétroaction. Branchez-le sur 5 V ou 3,3 V.
- Fil de masse (GND) : Ce fil se connecte au potentiomètre de rétroaction. Branchez-le à la masse.
- Fil du potentiomètre : Également appelé fil de rétroaction ou de sortie, ce fil transmet une valeur de tension qui varie en fonction de la position du débattement.
Comment ça marche
Lorsque nous appliquons une tension élevée aux fils positifs et négatifs, l'actionneur se déployera ou se rétractera. Plus précisément, si nous connectons :
- Connectez 12 V (comme 12 V, 24 V, 48 V, etc.) et la masse aux fils positif et négatif respectivement : l'actionneur linéaire s'étend à pleine vitesse jusqu'à ce qu'il s'arrête en fin de course.
- Connectez 12 V (comme 12 V, 24 V, 48 V, etc.) et la masse aux fils négatif et positif respectivement : l'actionneur linéaire se rétracte à pleine vitesse jusqu'à ce qu'il s'arrête en fin de course.
- Si l'alimentation de l'actionneur est coupée (la masse connectée aux fils positifs et négatifs) pendant qu'il est en extension ou en rétraction, l'actionneur s'arrêtera.
※ Note:
- La tension nécessaire pour piloter l'actionneur varie en fonction de ses spécifications. Consultez la fiche technique ou le manuel pour connaître la tension adaptée.
- L'actionneur peut maintenir sa position sans alimentation, même s'il soutient un poids.
La tension dans le fil du potentiomètre varie en fonction de la position de l'actionneur. En mesurant cette tension, nous pouvons déterminer où se situe la course.
Schéma de câblage
Avant de câbler, retirez les trois cavaliers du module L298N.
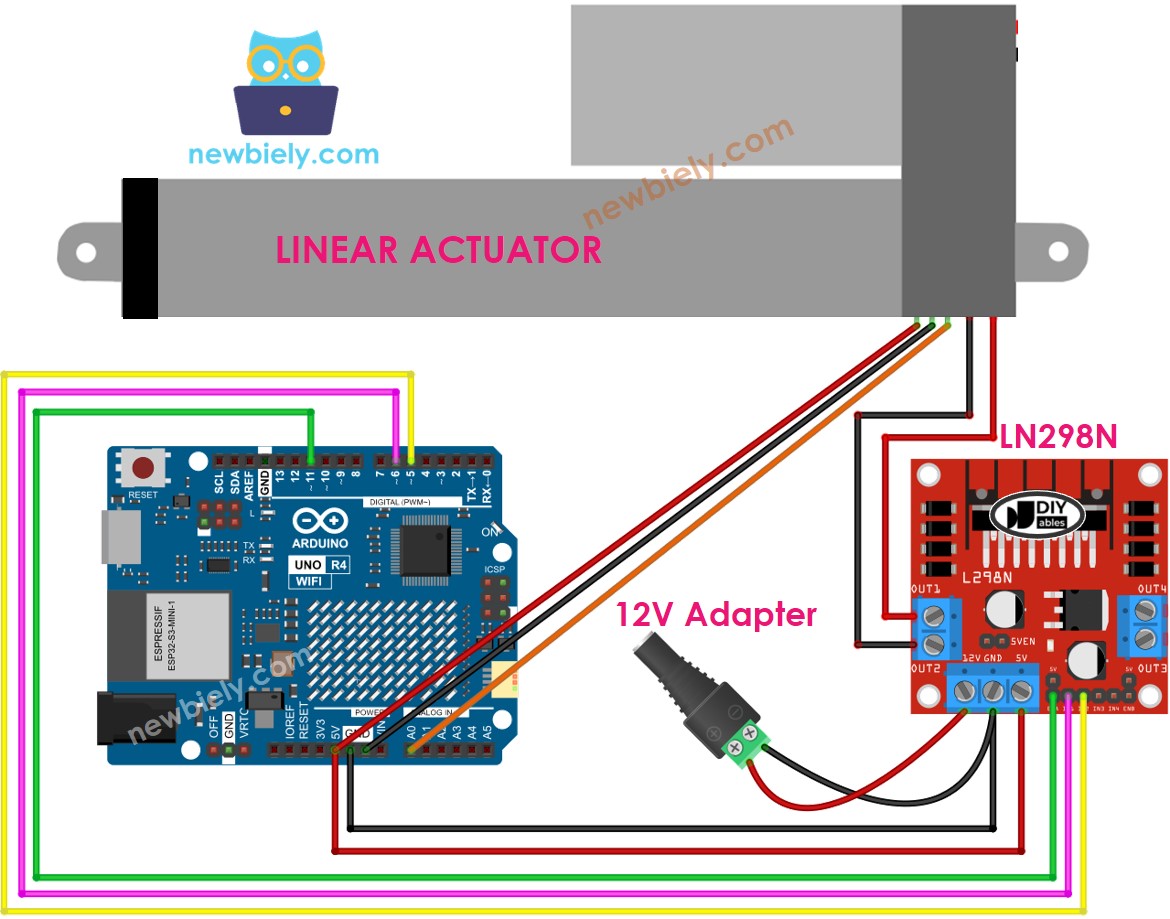
Cette image a été créée avec Fritzing. Cliquez pour agrandir l'image.
Comment contrôler l'extension et la rétraction d'un actionneur linéaire
Visitez le tutoriel pour l'Arduino UNO R4 Actuator Arduino UNO R4 - Actionneur..
Comment trouver la position de l'actuateur linéaire
Voici comment trouver la position de la course sur un vérin linéaire :
Calibration
- Mesurez la longueur de la course de l'actionneur (en millimètres) avec une règle ou consultez la fiche technique.
- Trouvez les valeurs de sortie lorsque l'actionneur linéaire est complètement étendu et rétracté en exécutant le code suivant.
- Vous verrez le log sur le Moniteur série comme dans l'exemple ci-dessous.
- Notez ces valeurs.
- Si les valeurs minimales et maximales sont inversées, échangez IN1_PIN et IN2_PIN.
- Mettez à jour trois valeurs dans le code ci-dessous.
Code Arduino UNO R4 qui calcule la position de l'actionneur
- Modifiez les trois valeurs ajustées dans le code
- Chargez le code sur l'Arduino UNO R4
- Vérifiez le résultat dans le Moniteur série
Comment contrôler un actionneur linéaire à une position précise
Vidéo
Résumé
Dans ce tutoriel sur Arduino UNO R4, vous avez appris à utiliser un actionneur linéaire à rétroaction pour des projets de bricolage. Ce guide facile vous a appris comment fonctionne l'actionneur, comment déterminer sa position en millimètres et comment le déplacer jusqu'au bon endroit avec la programmation Arduino. Après notre leçon sur un actionneur linéaire sans rétroaction, ce petit projet Arduino vous montre comment construire un système de déplacement intelligent. Maintenant, vous pouvez réaliser vos propres projets de contrôle du mouvement avec Arduino UNO R4 !