Arduino UNO R4 - Servomoteur à potentiomètre
Ce tutoriel vous explique comment contrôler un servomoteur avec un potentiomètre en utilisant l'Arduino Uno R4. Ce tutoriel démontre comment ajuster l'angle du servomoteur en tournant un potentiomètre. Vous apprendrez :
- Comment connecter un potentiomètre et un servomoteur à l'Arduino Uno R4.
- Comment programmer l'Arduino Uno R4 pour lire la valeur du potentiomètre, la convertir en une valeur d'angle, puis contrôler le servomoteur en conséquence.
Préparation du matériel
Ou vous pouvez acheter les kits suivants:
| 1 | × | Kit de Démarrage DIYables STEM V4 IoT (Arduino inclus) | |
| 1 | × | Kit de Capteurs DIYables (18 capteurs/écrans) |
Note d'achat: Si vous utilisez plusieurs servomoteurs, nous recommandons d'utiliser le PCA9685 16 Channel PWM Servo Driver Module pour économiser les broches du MCU et faciliter le câblage.
À propos du servomoteur et du potentiomètre
Avant d'aller plus loin, si vous n'êtes pas familiarisé avec les servomoteurs et les potentiomètres (leur brochage, leur fonctionnement et leur programmation), veuillez vous référer aux tutoriels ci-dessous :
Diagramme de câblage
- Le schéma de câblage entre l'Arduino UNO R4, le servomoteur et le potentiomètre classique
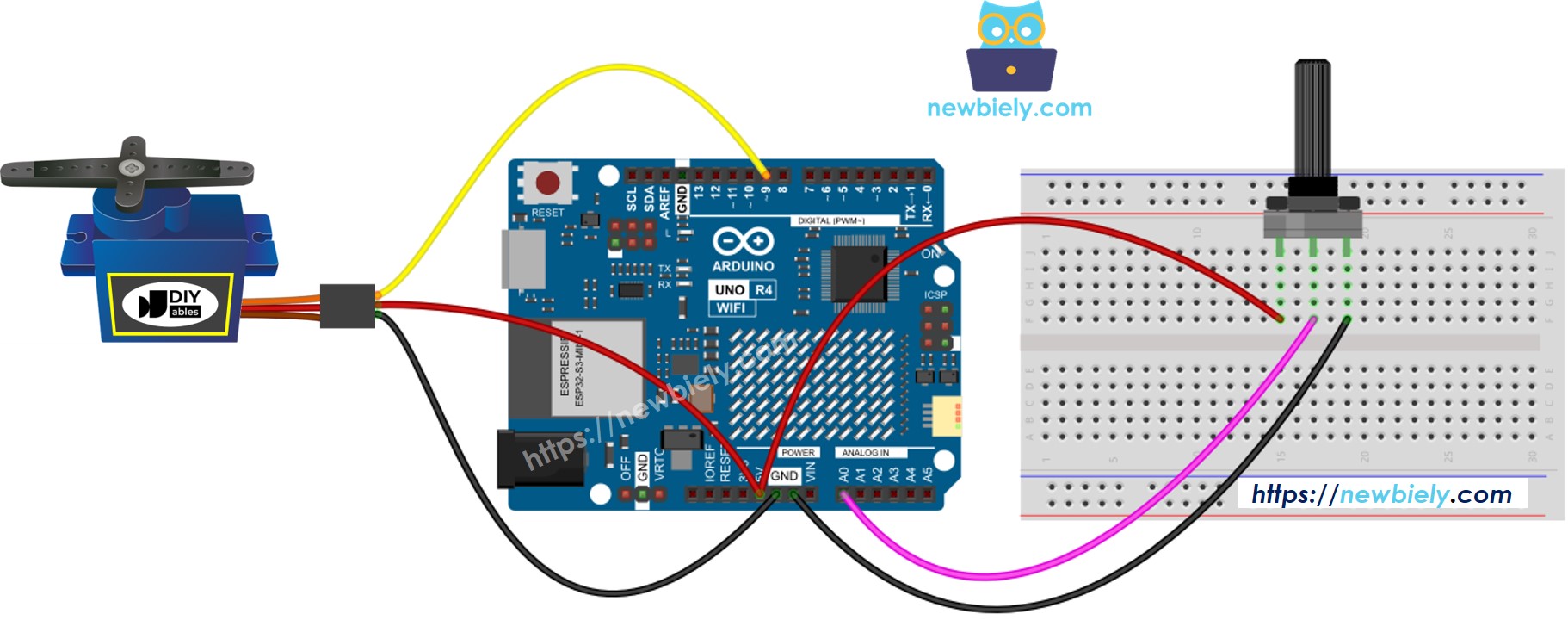
Cette image a été créée avec Fritzing. Cliquez pour agrandir l'image.
- Le schéma de câblage entre Arduino UNO R4, servomoteur et module potentiomètre
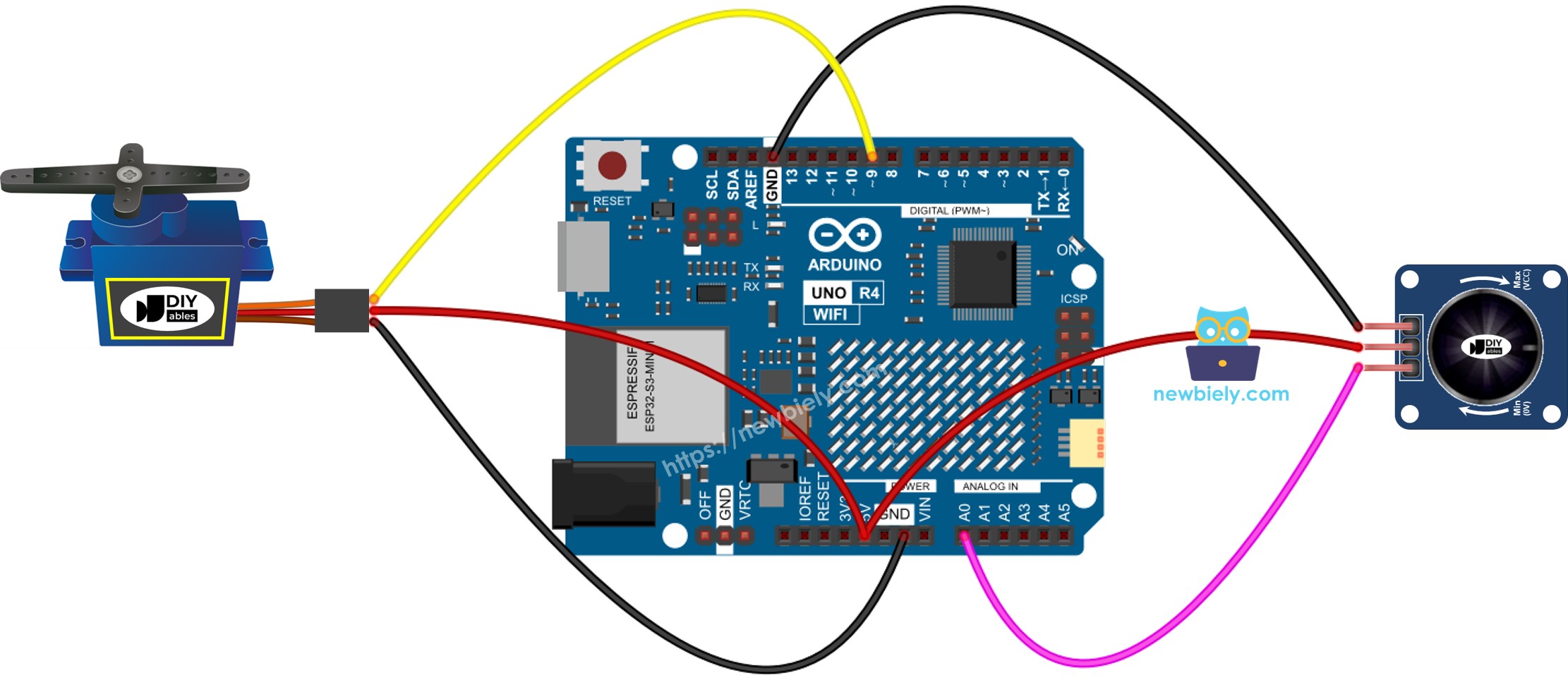
Cette image a été créée avec Fritzing. Cliquez pour agrandir l'image.
Comment Programmer
- Lit la valeur du potentiomètre (les valeurs vont de 0 à 1023)
- Ajuste-le à un angle (valeur comprise entre 0 et 180)
- Change la position du servomoteur en fonction de l'angle.
Code pour Arduino UNO R4
Étapes rapides
Suivez ces instructions étape par étape :
- Si c'est la première fois que vous utilisez l'Arduino Uno R4 WiFi/Minima, consultez le tutoriel sur Arduino UNO R4 - Installation du logiciel..
- Connectez les composants selon le schéma fourni.
- Connectez la carte Arduino Uno R4 à votre ordinateur à l'aide d'un câble USB.
- Lancez l'IDE Arduino sur votre ordinateur.
- Sélectionnez la carte Arduino Uno R4 appropriée (par exemple Arduino Uno R4 WiFi) et le port COM.
- Copiez-collez le code ci-dessus dans l'IDE Arduino
- Cliquez sur le bouton Upload dans l'IDE Arduino pour transférer le code sur l'Arduino UNO R4.

- Ouvrez le moniteur série
- Tournez le potentiomètre
- Regardez le servomoteur tourner
- Vérifiez le résultat sur le moniteur série
Explication du code
Vérifiez les explications données dans les commentaires du code source — écrites ligne par ligne !