Arduino UNO R4 - Bouton - Servomoteur
Dans ce tutoriel, nous apprendrons comment contrôler un servomoteur avec un bouton en utilisant une carte Arduino Uno R4. Appuyer sur le bouton fera tourner le servomoteur jusqu'à 90 degrés, et appuyer à nouveau sur le bouton le ramènera à 0 degré. Ce processus se répète à chaque fois que le bouton est pressé.
Le tutoriel est divisé en deux sections :
- Sans anti-rebond: Le servomoteur réagit aux appuis sur le bouton sans gérer le bruit du signal.
- Avec anti-rebond: Le code comprend une logique d'anti-rebond pour éviter les déclenchements indésirables et garantir des appuis fiables sur le bouton.
Ce projet est idéal pour les débutants afin de comprendre le contrôle des servomoteurs, les entrées de bouton et les techniques d'anti-rebond avec Arduino Uno R4.
Préparation du matériel
Ou vous pouvez acheter les kits suivants:
| 1 | × | Kit de Démarrage DIYables STEM V4 IoT (Arduino inclus) | |
| 1 | × | Kit de Capteurs DIYables (18 capteurs/écrans) |
Note d'achat: Si vous utilisez plusieurs servomoteurs, nous recommandons d'utiliser le PCA9685 16 Channel PWM Servo Driver Module pour économiser les broches du MCU et faciliter le câblage.
À propos du servomoteur et du bouton
Si vous n'êtes pas familiarisé(e) avec les servomoteurs et les boutons, y compris leur brochage, leur fonctionnement ou comment les programmer, veuillez vous référer aux tutoriels suivants pour plus d'informations.
Diagramme de câblage
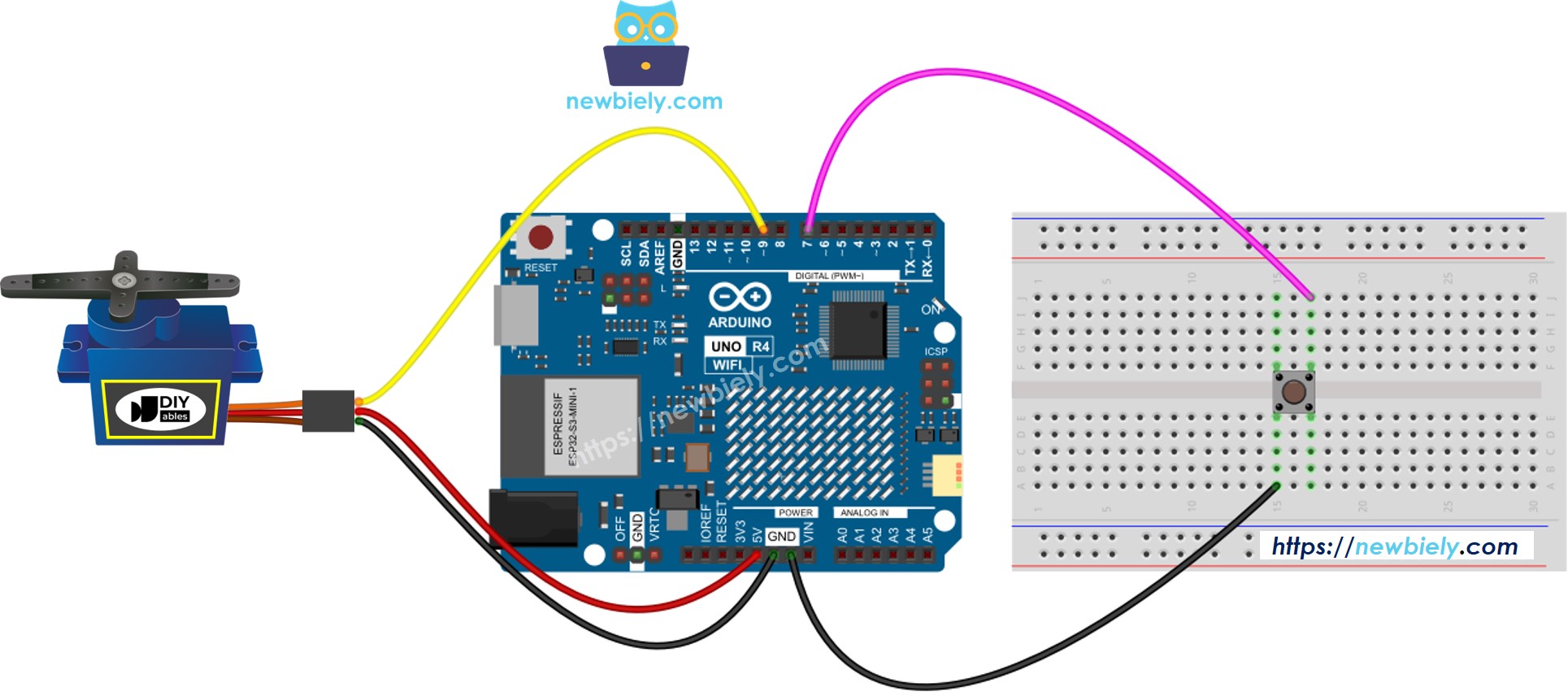
Cette image a été créée avec Fritzing. Cliquez pour agrandir l'image.
Code Arduino UNO R4 - Bouton de commande du servomoteur sans anti-rebond
Étapes rapides
Suivez ces instructions étape par étape :
- Si c'est la première fois que vous utilisez l'Arduino Uno R4 WiFi/Minima, reportez-vous au tutoriel sur Arduino UNO R4 - Installation du logiciel..
- Reliez les composants selon le schéma fourni.
- Connectez la carte Arduino Uno R4 à votre ordinateur à l'aide d'un câble USB.
- Lancez l'IDE Arduino sur votre ordinateur.
- Sélectionnez la carte Arduino Uno R4 appropriée (par exemple, Arduino Uno R4 WiFi) et le port COM.
- Copiez et collez le code ci-dessus dans l'IDE Arduino.
- Cliquez sur le bouton Upload dans l'IDE Arduino pour transférer le code vers l'Arduino UNO R4.
- Appuyez sur le bouton à plusieurs reprises.
- Observez le mouvement du servomoteur.
※ Note:
Parfois le code donné ne fonctionne pas correctement. Pour s'assurer qu'il fonctionne toujours correctement, nous devons utiliser l'anti-rebond des boutons. L'anti-rebond des boutons peut être difficile pour les débutants. Cependant, grâce à l'aide de la bibliothèque ezButton, cela devient beaucoup plus facile.
Code Arduino UNO R4 - Contrôle par bouton du servomoteur avec anti-rebond
Pourquoi l'anti-rebond est-il important ? ⇒ voir Arduino UNO R4 - Bouton - anti-rebond.
Étapes rapides
- Installez la bibliothèque ezButton. Voir Comment faire
- Copiez le code et ouvrez-le dans l'IDE Arduino
- Cliquez sur le bouton Upload dans l'IDE Arduino pour transférer le code vers l'Arduino UNO R4
- Appuyez sur le bouton à plusieurs reprises
- Observez comment le servomoteur bouge