Arduino UNO R4 - servomoteur
Ce tutoriel explique comment contrôler un servomoteur à l'aide d'un Arduino UNO R4. Plus précisément, nous allons apprendre :
- Programmation de l'Arduino UNO R4 pour contrôler un servomoteur
- Programmation de l'Arduino UNO R4 pour le contrôle de la vitesse d'un servomoteur
- Utilisation d'une alimentation externe pour les servomoteurs
Préparation du matériel
Ou vous pouvez acheter les kits suivants:
| 1 | × | Kit de Démarrage DIYables STEM V4 IoT (Arduino inclus) | |
| 1 | × | Kit de Capteurs DIYables (18 capteurs/écrans) |
Note d'achat: Si vous utilisez plusieurs servomoteurs, nous recommandons d'utiliser le PCA9685 16 Channel PWM Servo Driver Module pour économiser les broches du MCU et faciliter le câblage.
À propos du servomoteur
Un servomoteur est un composant capable de faire tourner son arbre de sortie, généralement de 0 à 180 degrés. Il est utilisé pour contrôler l'angle d'un objet.
Schéma des broches
Cet exemple utilise un servomoteur avec trois broches :
- Broche VCC : Connectez le fil rouge à VCC (5 volts).
- Broche GND : Connectez le fil noir ou marron à GND (0 volts).
- Broche de signal : Connectez le fil jaune ou orange pour recevoir le signal de commande PWM depuis une broche Arduino UNO R4.
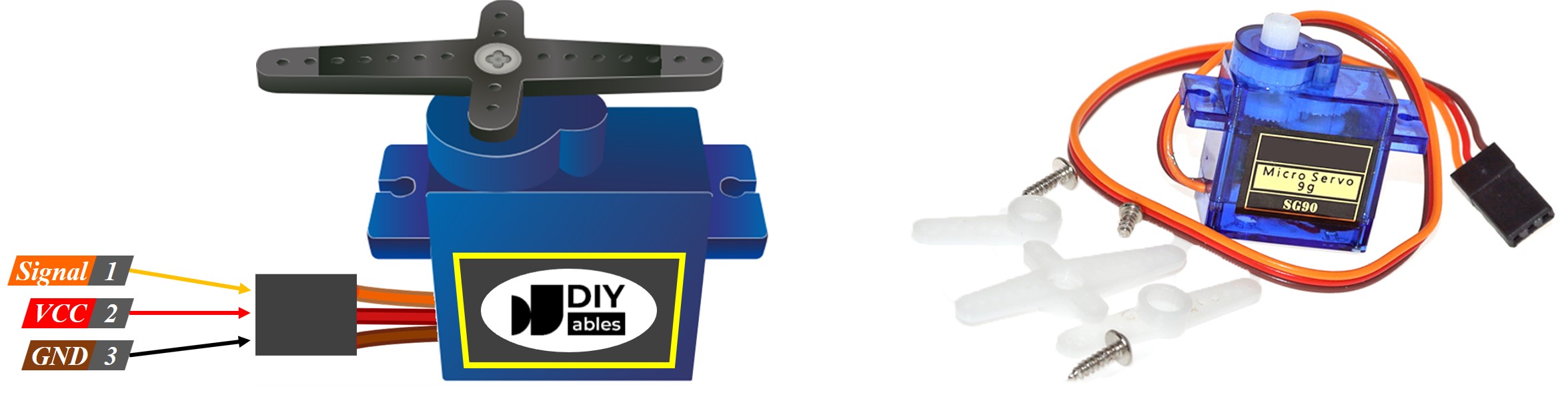
Diagramme de câblage
Parfois, vous pouvez voir des schémas de câblage en ligne montrant une connexion entre la broche VCC d'un servomoteur et la broche 5V de la carte Arduino UNO R4. Il est préférable d'éviter cette méthode, car elle pourrait endommager la carte Arduino UNO R4.
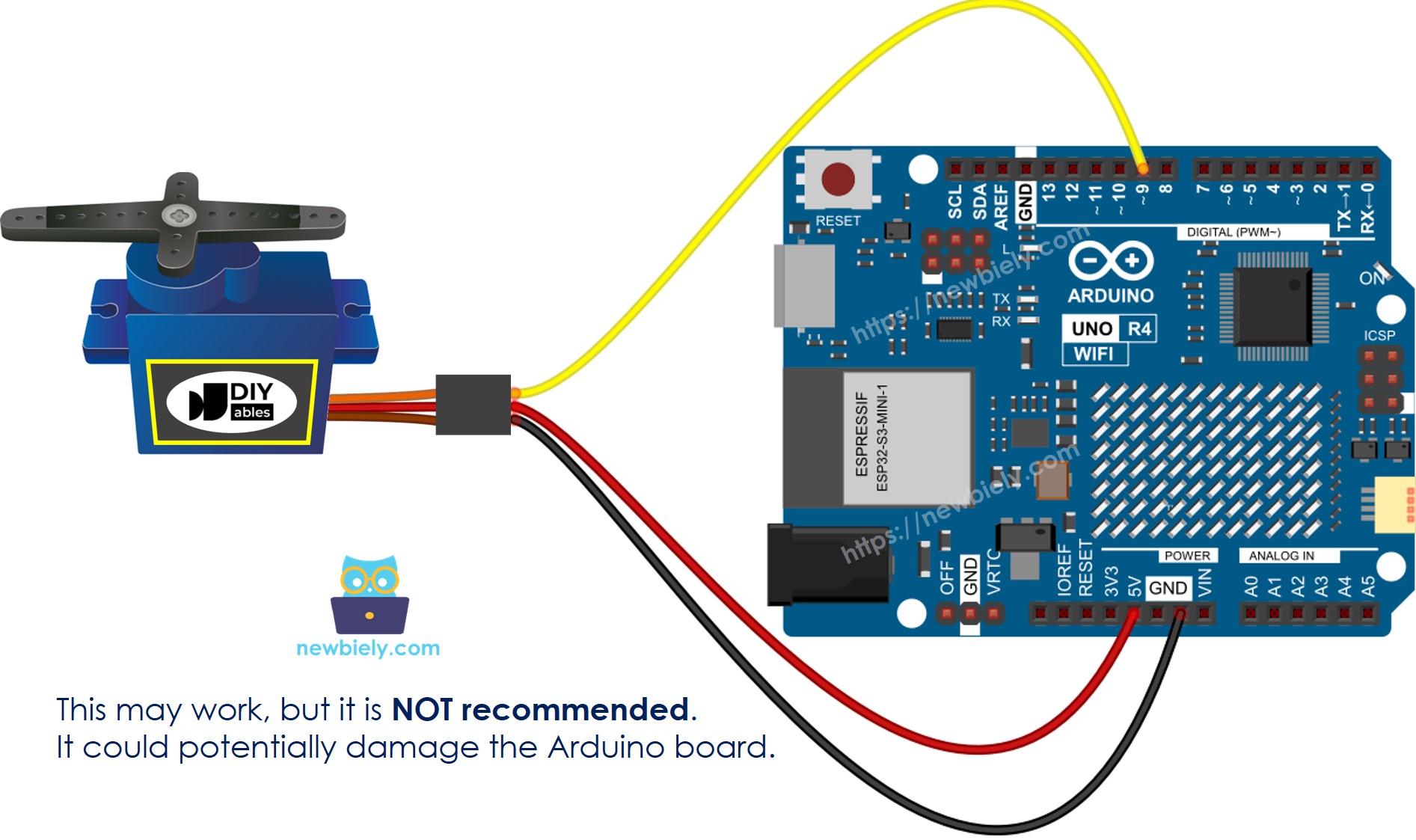
Cette image a été créée avec Fritzing. Cliquez pour agrandir l'image.
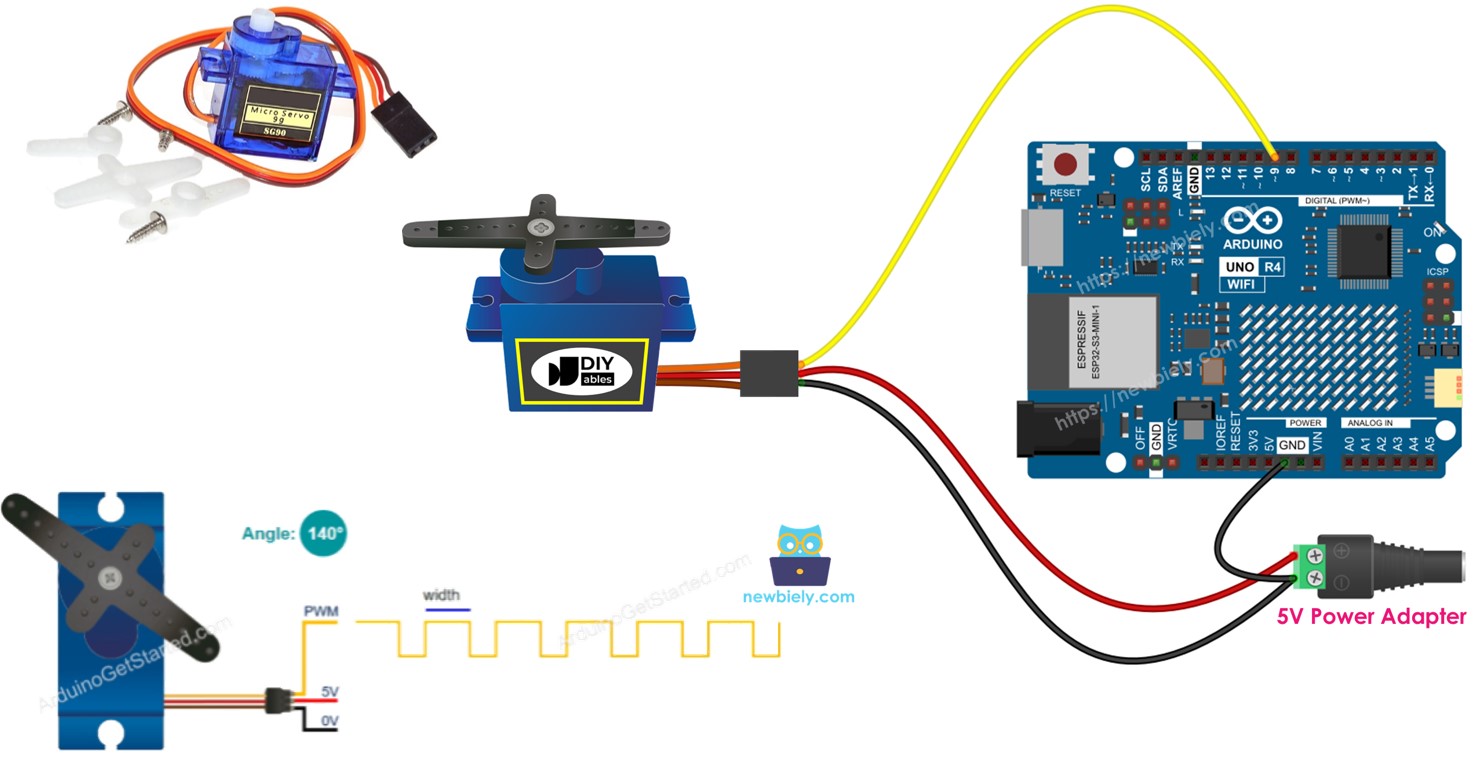
Pour protéger votre carte Arduino UNO R4, il est préférable d'utiliser une alimentation externe pour le servomoteur. Le schéma de câblage ci-dessous montre comment connecter le servomoteur à une source d'alimentation externe.
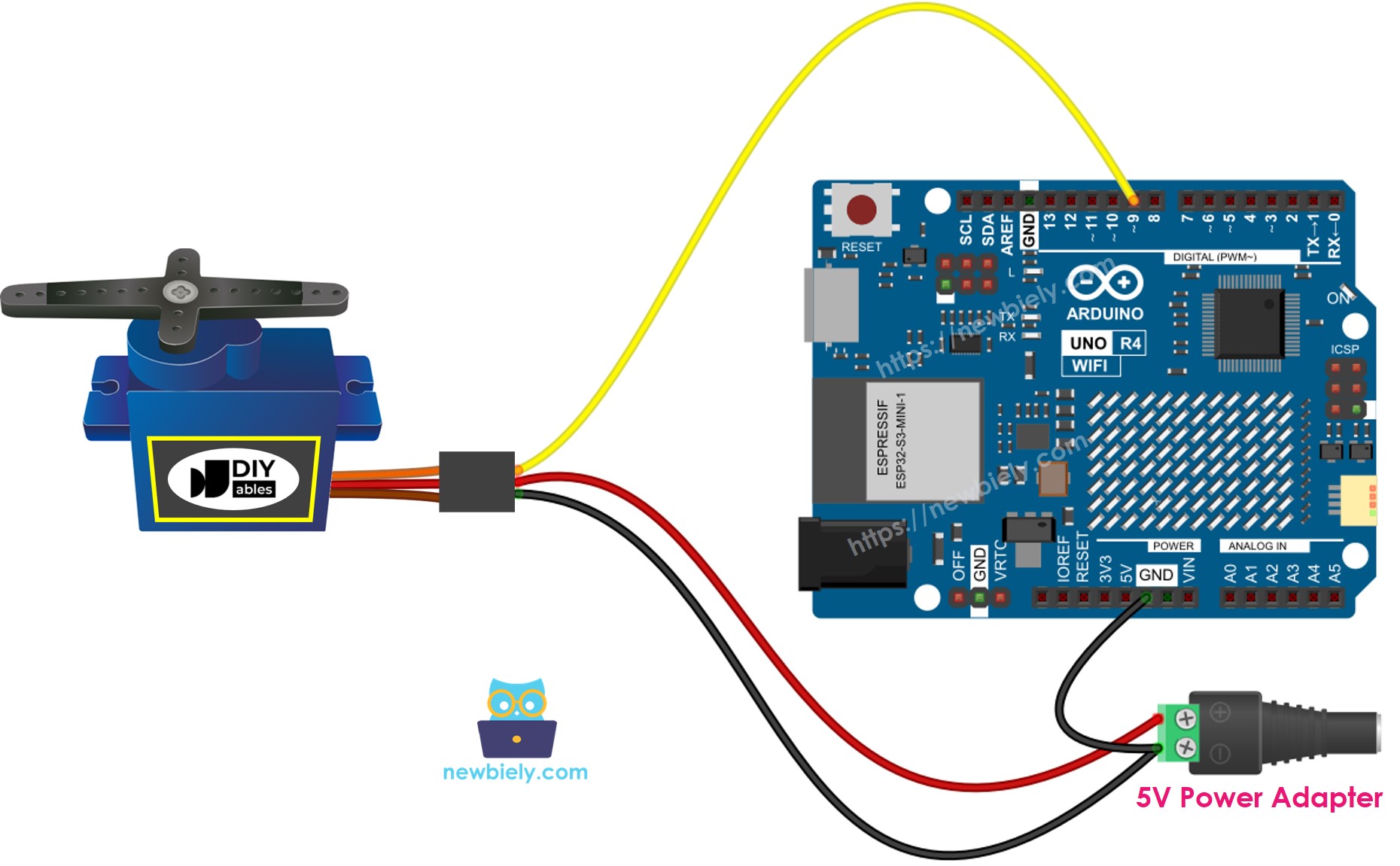
Cette image a été créée avec Fritzing. Cliquez pour agrandir l'image.
Voir Comment alimenter l'Arduino UNO R4..
Assurez-vous de connecter la masse (GND) de l’alimentation externe à la masse (GND) de la carte Arduino UNO R4. Cette étape est très importante pour son bon fonctionnement.
Comment programmer pour un servomoteur
- Inclure la bibliothèque:
- Créer un objet Servo :
Si vous gérez plusieurs servomoteurs, déclarez simplement des objets Servo supplémentaires.
- Connectez la broche de commande de l'Arduino UNO R4 à la broche de signal du servomoteur, par exemple la broche 9.
- Enfin, tournez le servomoteur à l'angle dont vous avez besoin, par exemple 90 degrés.
Code Arduino UNO R4
Étapes rapides
Suivez ces instructions étape par étape :
- Si c'est la première fois que vous utilisez l'Arduino Uno R4 WiFi/Minima, consultez le tutoriel sur Arduino UNO R4 - Installation du logiciel..
- Connectez les composants selon le schéma fourni.
- Connectez la carte Arduino Uno R4 à votre ordinateur à l'aide d'un câble USB.
- Lancez l'IDE Arduino sur votre ordinateur.
- Sélectionnez la carte Arduino Uno R4 appropriée (par exemple, Arduino Uno R4 WiFi) et le port COM.
- Collez le code ci-dessus dans l'IDE Arduino.
- Appuyez sur le bouton Upload dans l'IDE Arduino pour envoyer le code à l'Arduino UNO R4.

- Regardez ce qui se passe : le servomoteur tourne lentement de 0 à 180 degrés, puis revient lentement de 180 à 0 degrés.
Explication du code
Vous pouvez voir l'explication dans la section des commentaires du code Arduino ci-dessus.
Comment contrôler la vitesse du servomoteur
L'utilisation des fonctions map() et millis() nous permet d'ajuster en douceur la vitesse d'un servomoteur tout en laissant le reste du code s'exécuter sans interruptions.