Arduino UNO R4 - Capteur de mouvement - Servomoteur
Bienvenue ! Ce tutoriel vous guidera dans l'utilisation d'un Arduino UNO R4 avec un capteur de mouvement et un servomoteur. C’est clair et simple, idéal pour les débutants. Le capteur de mouvement détecte les mouvements, et le servomoteur tourne à un angle précis. Vous pouvez utiliser cela pour contrôler des éléments tels qu'un portail, une caméra ou un petit bras robotique. À la fin, vous apprendrez à :
- Tourner le servomoteur à 90 degrés lorsque le capteur de mouvement détecte un mouvement.
- Ramener le servomoteur à 0 degré lorsqu'il n'y a pas de mouvement.
Vous comprendrez comment programmer l'Arduino UNO R4 pour lire le capteur de mouvement et contrôler le servomoteur. Connectez le servomoteur à un appareil, et le capteur de mouvement s'en chargera. Ce projet est parfait pour tous ceux qui débutent avec Arduino et qui veulent créer des projets amusants et interactifs. Commençons !
Préparation du matériel
Ou vous pouvez acheter les kits suivants:
| 1 | × | Kit de Démarrage DIYables STEM V4 IoT (Arduino inclus) | |
| 1 | × | Kit de Capteurs DIYables (18 capteurs/écrans) |
Note d'achat: Si vous utilisez plusieurs servomoteurs, nous recommandons d'utiliser le PCA9685 16 Channel PWM Servo Driver Module pour économiser les broches du MCU et faciliter le câblage.
À propos du servomoteur et du capteur de mouvement
Si vous n’êtes pas familiarisé avec les moteurs à servomoteur et les capteurs de mouvement (leurs branchements de broches, leurs fonctions et les méthodes de programmation), veuillez vous référer aux tutoriels ci-dessous :
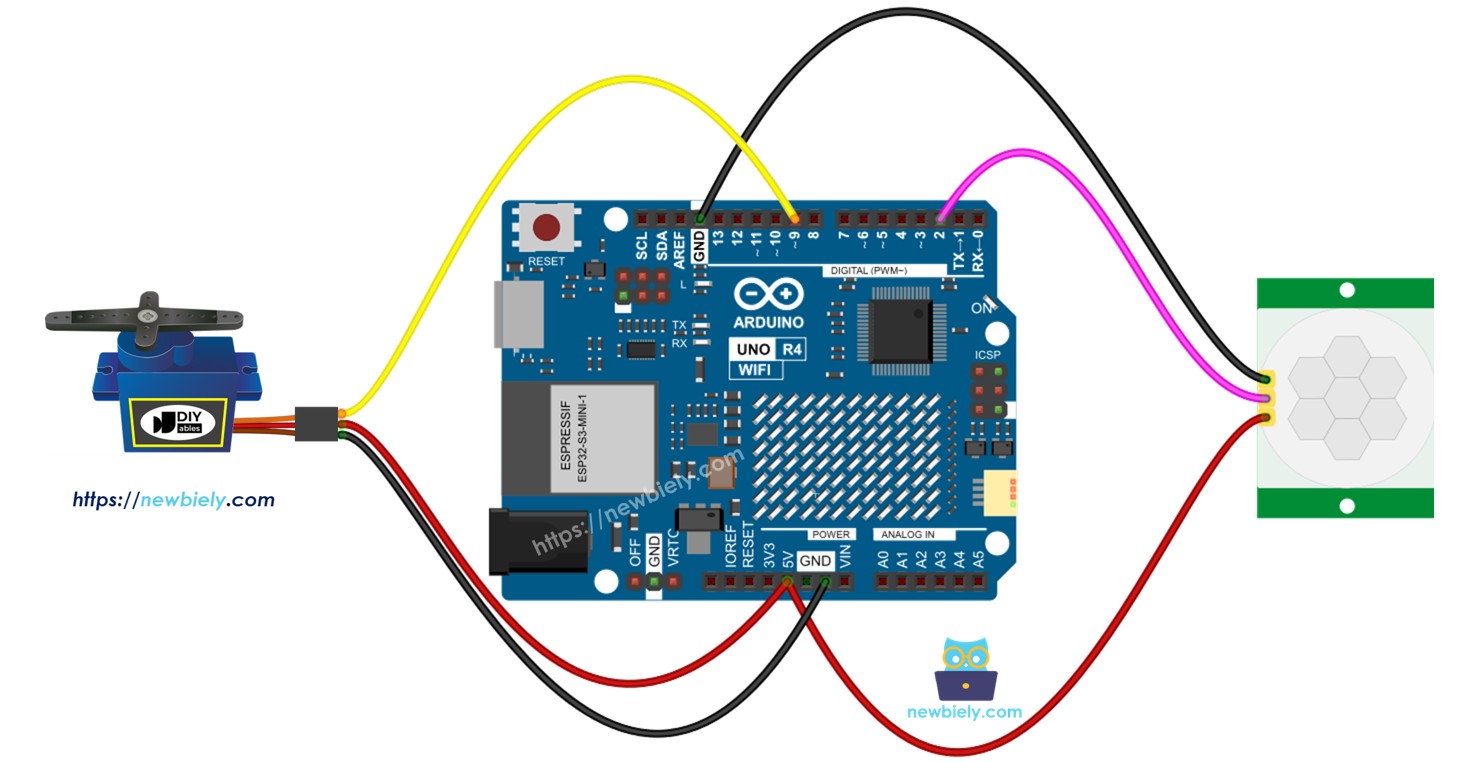
Diagramme de câblage
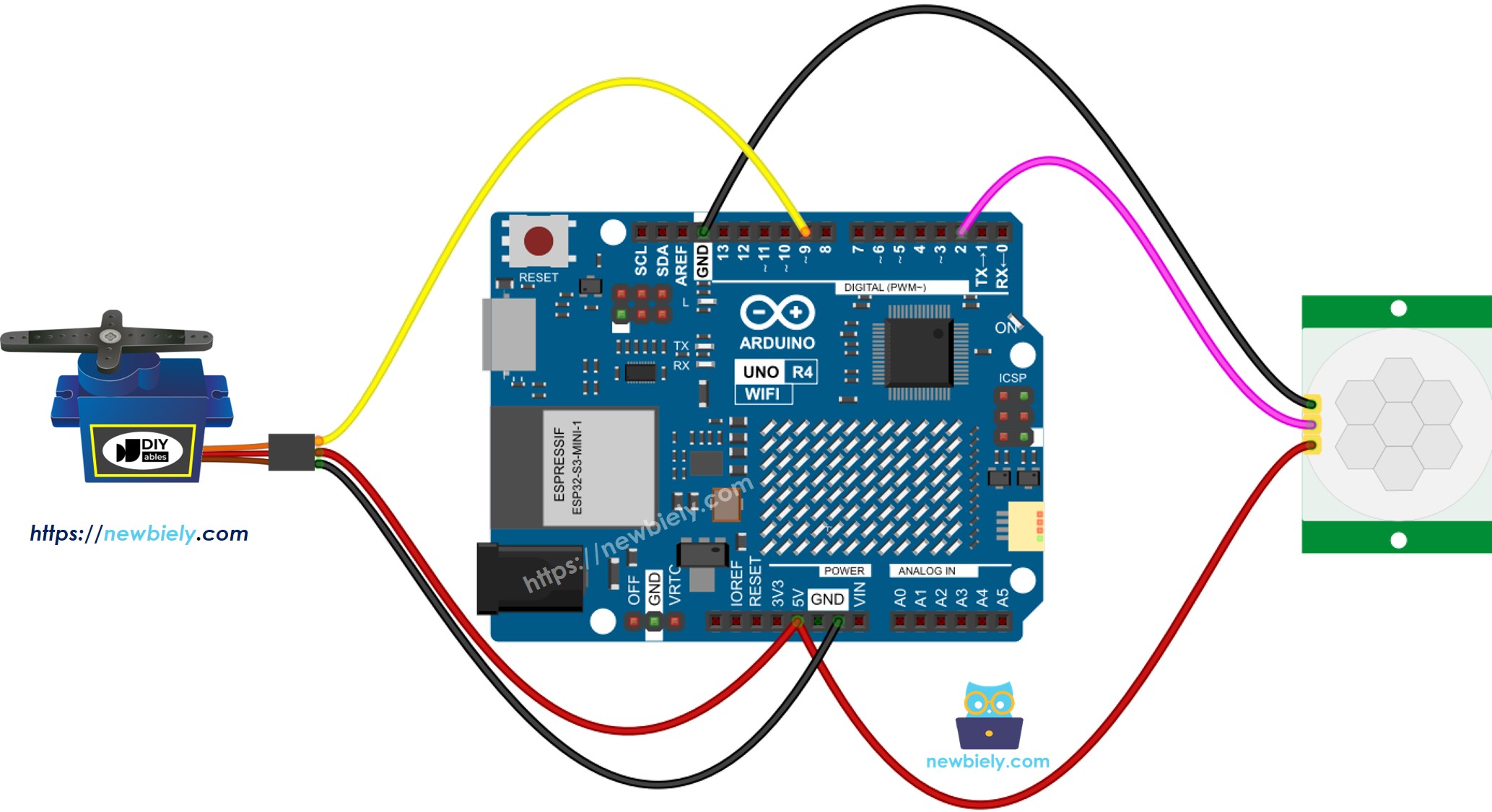
Cette image a été créée avec Fritzing. Cliquez pour agrandir l'image.
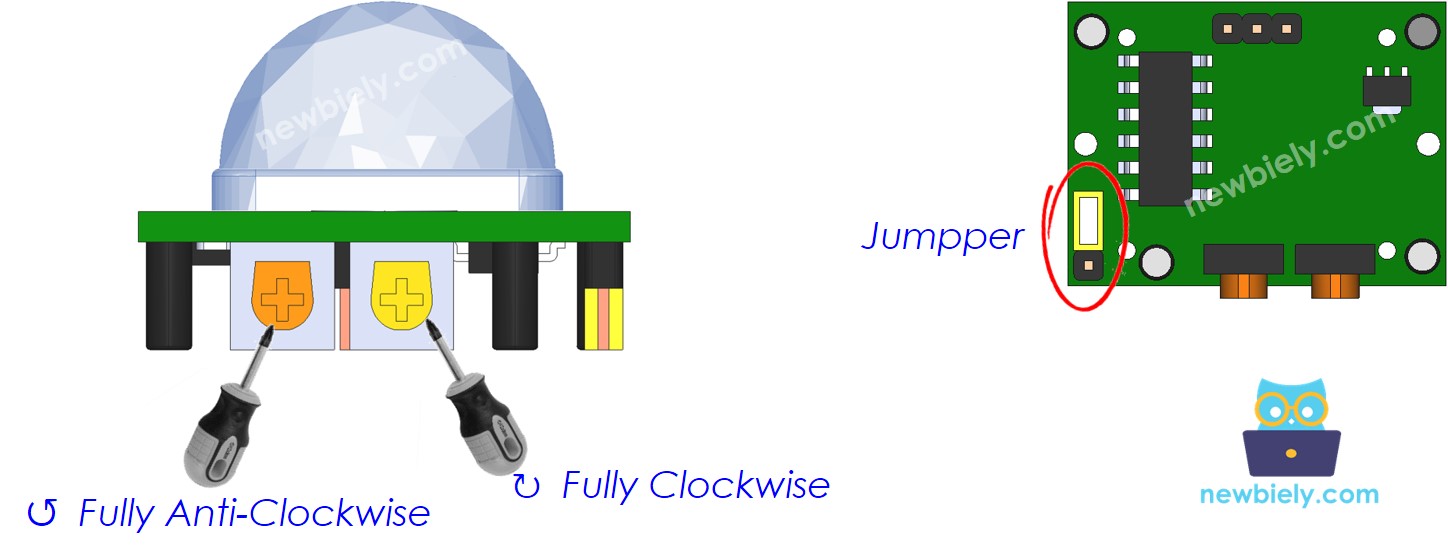
Paramètre initial
| Time Delay Adjuster | Screw it in anti-clockwise direction fully. |
| Detection Range Adjuster | Screw it in clockwise direction fully. |
| Repeat Trigger Selector | Put jumper as shown on the image. |
Code Arduino UNO R4 - Le capteur de mouvement contrôle le servomoteur
Étapes rapides
Suivez ces instructions étape par étape :
- Si c'est la première fois que vous utilisez l'Arduino Uno R4 WiFi/Minima, consultez le tutoriel sur Arduino UNO R4 - Installation du logiciel..
- Reliez les composants selon le schéma fourni.
- Connectez la carte Arduino Uno R4 à votre ordinateur à l'aide d'un câble USB.
- Lancez l'IDE Arduino sur votre ordinateur.
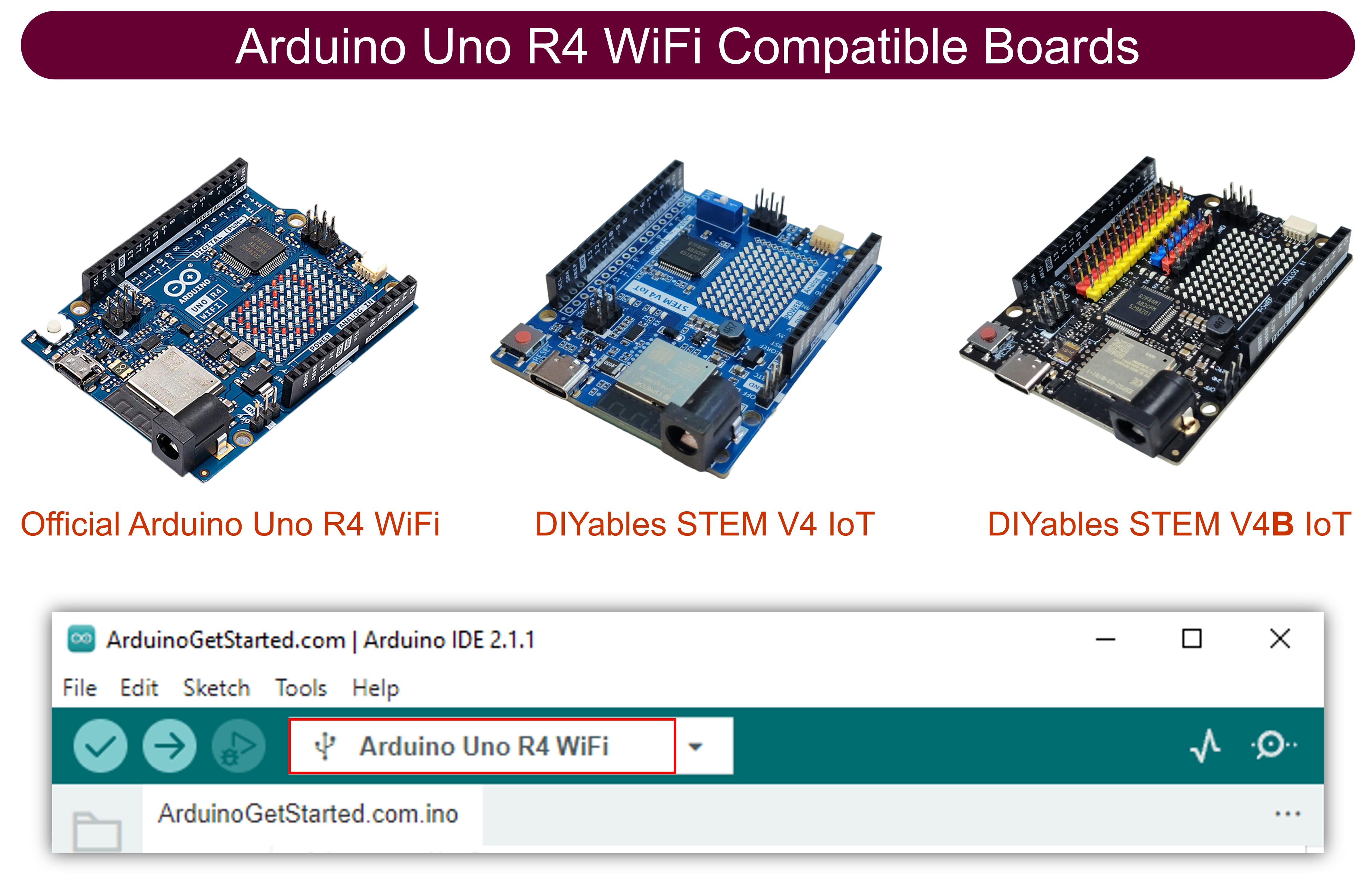
- Sélectionnez la carte Arduino Uno R4 appropriée (par exemple, Arduino Uno R4 WiFi) et le port COM.
- Connectez l'Arduino UNO R4 sur votre ordinateur à l'aide du câble USB.
- Démarrez l'IDE Arduino, choisissez la carte et le port corrects.
- Collez le code fourni dans l'IDE Arduino.
- Appuyez sur le bouton Upload dans l'IDE Arduino pour téléverser le code vers l'Arduino UNO R4.
- Faites bouger votre main devant le capteur.
- Observez le servomoteur bouger en réponse.
Vidéo
La vidéo ci-dessous est un tutoriel pas à pas montrant comment utiliser le capteur de mouvement HC-SR501 avec l'Arduino UNO R4. À la fin de la vidéo, vous verrez comment réaliser un système d'ouverture automatique de porte avec un servo et un buzzer à l'aide du code ci-dessous :