Arduino UNO R4 - Capteur à ultrasons
Ce tutoriel vous explique comment utiliser le capteur ultrasonique et l'Arduino UNO R4 pour mesurer la distance à un objet. En détail, nous apprendrons :
- Comment connecter un capteur à ultrasons à l'Arduino UNO R4
- Comment programmer l'Arduino pour lire la valeur du capteur à ultrasons et la convertir en distance
- Comment éliminer le bruit dans les données de distance issues d'un capteur à ultrasons sur l'Arduino UNO R4
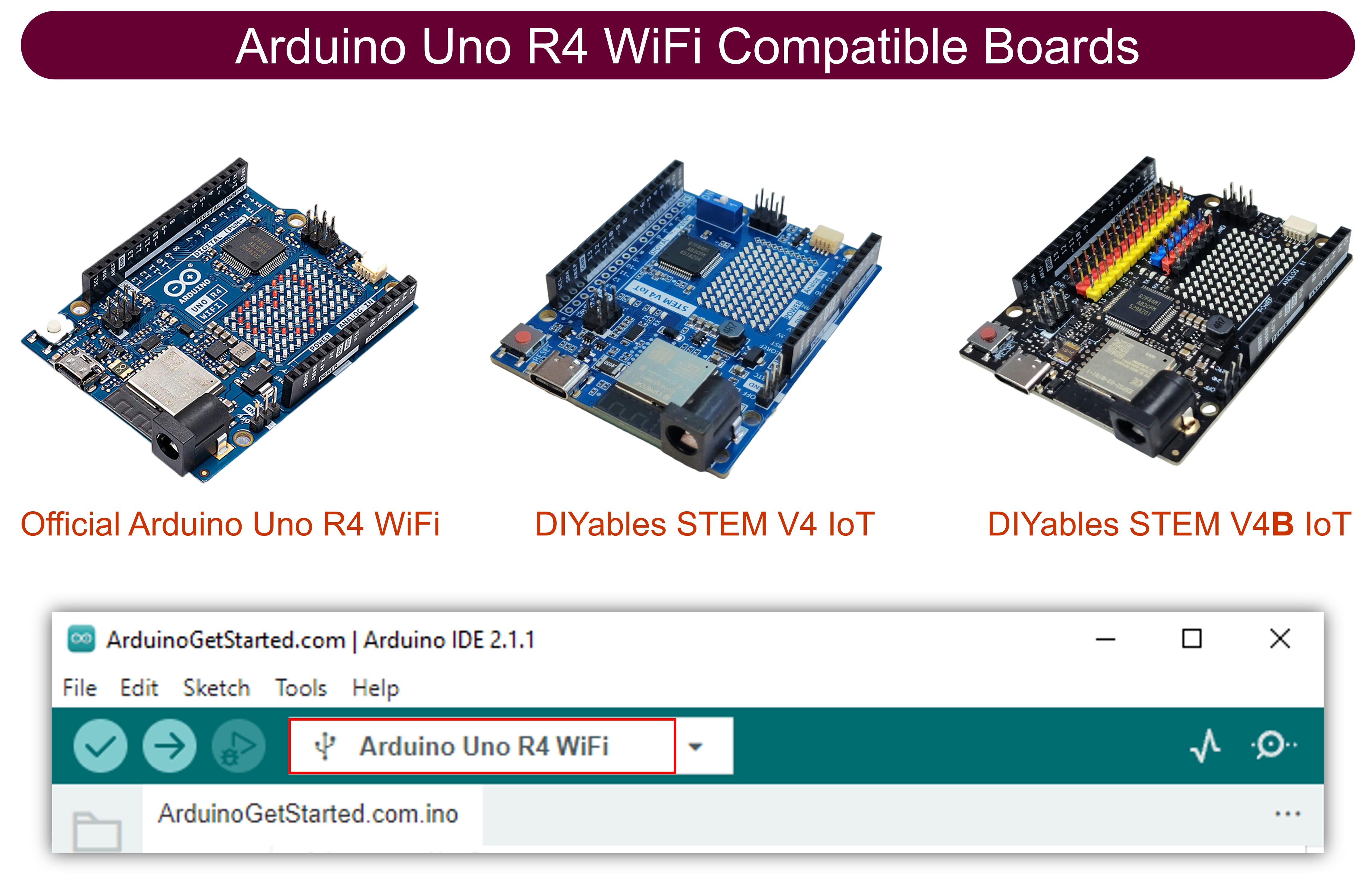
Préparation du matériel
Ou vous pouvez acheter les kits suivants:
| 1 | × | Kit de Démarrage DIYables STEM V4 IoT (Arduino inclus) | |
| 1 | × | Kit de Capteurs DIYables (18 capteurs/écrans) |
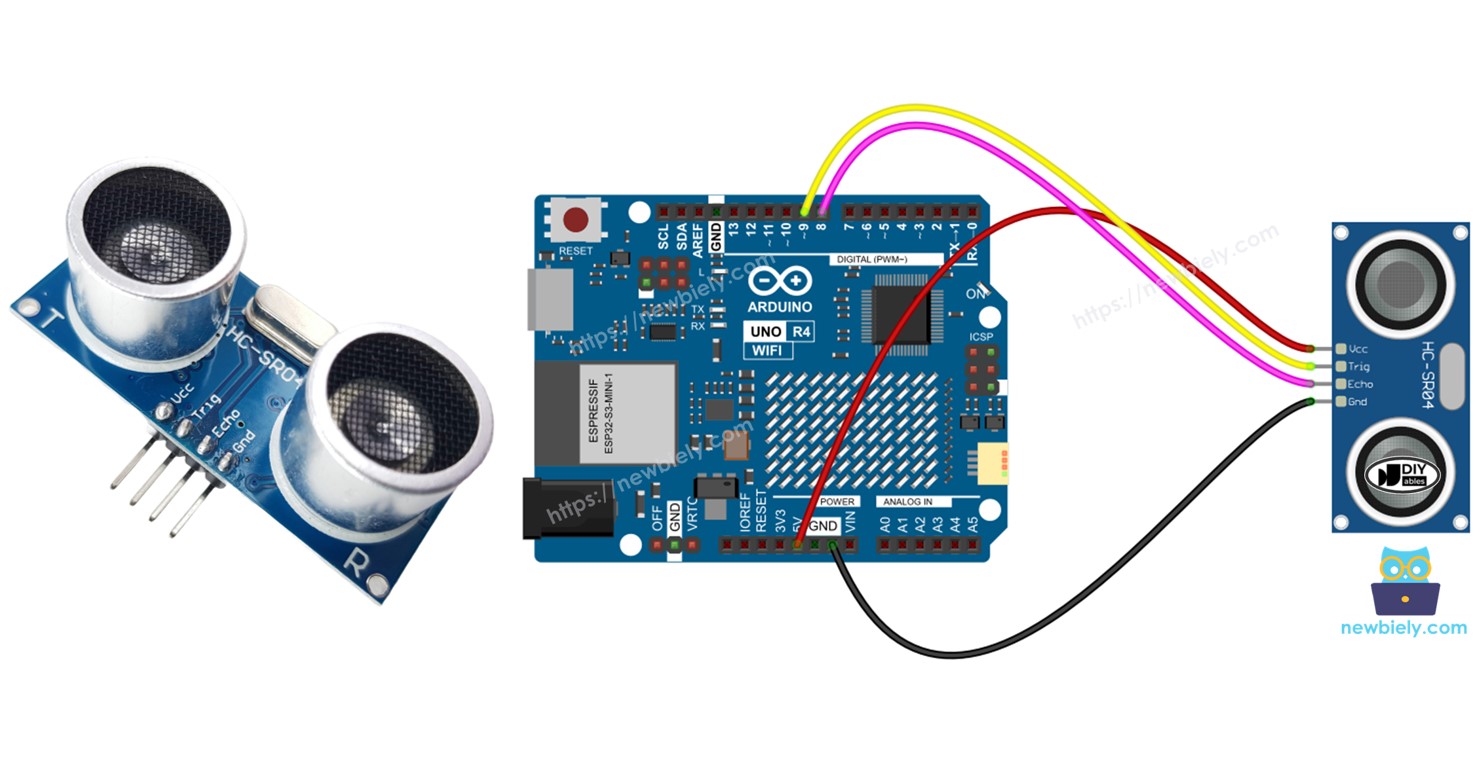
À propos du capteur à ultrasons
Le capteur ultrasonique HC-SR04 mesure la distance des objets en utilisant des ondes sonores. Il émet une onde sonore inaudible pour l’homme, puis écoute l’écho lorsque l’onde rebondit sur un objet. En mesurant le temps nécessaire au retour de l’onde sonore, le capteur peut calculer la distance à laquelle se trouve l’objet.
Schéma des broches
Le capteur ultrasonique HC-SR04 est livré avec quatre broches :
- Broche VCC : Connectez cette broche au VCC (5V).
- Broche GND : Connectez cette broche au GND (0V).
- Broche TRIG : Connectez cette broche à l'Arduino UNO R4 pour envoyer des signaux de contrôle (impulsions).
- Broche ECHO : Cette broche envoie des signaux (impulsions) vers l'Arduino UNO R4. L'Arduino UNO R4 calcule ensuite la durée de ces impulsions pour déterminer la distance.

Diagramme de câblage
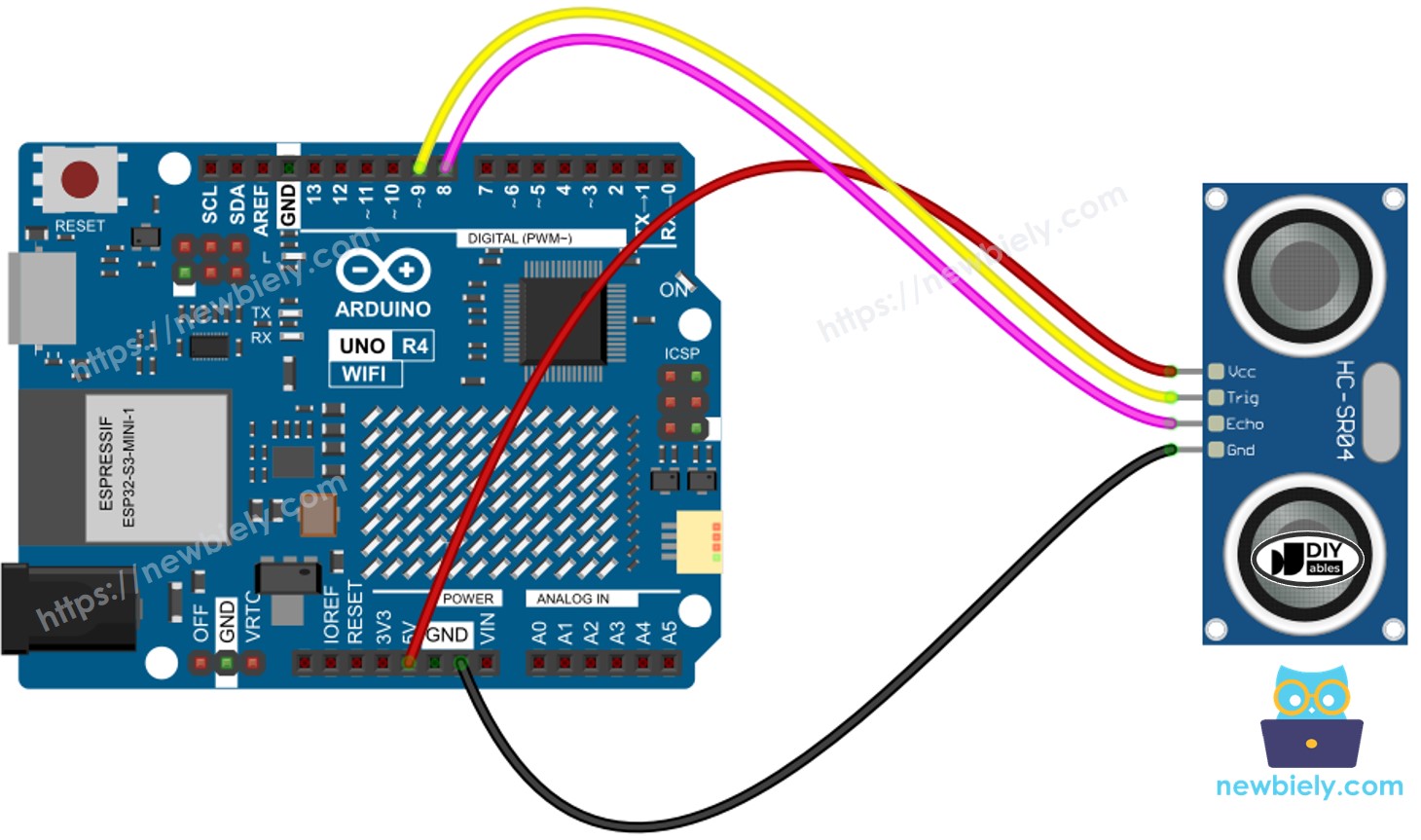
Cette image a été créée avec Fritzing. Cliquez pour agrandir l'image.
Code pour Arduino UNO R4
Étapes rapides
Suivez ces instructions étape par étape :
- Si c'est votre première utilisation de l'Arduino Uno R4 WiFi/Minima, reportez-vous au tutoriel sur Arduino UNO R4 - Installation du logiciel..
- Connectez les composants selon le schéma fourni.
- Connectez la carte Arduino Uno R4 à votre ordinateur à l'aide d'un câble USB.
- Lancez l'IDE Arduino sur votre ordinateur.
- Sélectionnez la carte Arduino Uno R4 appropriée (par exemple, Arduino Uno R4 WiFi) et le port COM.
- Copiez le code ci-dessus et ouvrez-le avec l'IDE Arduino
- Cliquez sur le bouton Upload dans l'IDE Arduino pour envoyer le code vers Arduino UNO R4

- Ouvrez le moniteur série.
- Agitez votre main devant le capteur ultrasonique.
- Vérifiez la distance entre votre main et le capteur sur le moniteur série.
Explication du code
L'explication se trouve dans les commentaires du code Arduino ci-dessus.
Comment filtrer le bruit des mesures de distance d'un capteur à ultrasons
La lecture du capteur ultrasonique contient du bruit. Dans certains cas, ces données bruitées peuvent entraîner un mauvais fonctionnement. Nous pouvons éliminer le bruit en utilisant cette méthode :
- Prenez plusieurs mesures et enregistrez-les dans un tableau.
- Triez le tableau du plus petit au plus grand.
- Supprimez le bruit des données:
- Ignorez les valeurs les plus petites, car elles constituent du bruit.
- Ignorez les valeurs les plus grandes, car elles constituent du bruit.
- Calculez la moyenne en utilisant les valeurs centrales restantes.
- Ignorez les cinq plus petits échantillons et les cinq plus grands échantillons, car ils sont considérés comme du bruit. Calculez la moyenne des dix échantillons du milieu, du 5e au 14e.
Le code d'exemple ci-dessous effectue 20 mesures.
Vidéo
Voici le code complet utilisé dans cette vidéo:
Voici un tutoriel vidéo étape par étape montrant comment utiliser un capteur ultrasonique avec l'Arduino UNO R4:
Applications des capteurs ultrasoniques
- Évitement des collisions
- Détection du remplissage
- Mesure du niveau
- Détection de la proximité