Arduino UNO R4 - contrôle la voiture via le Web
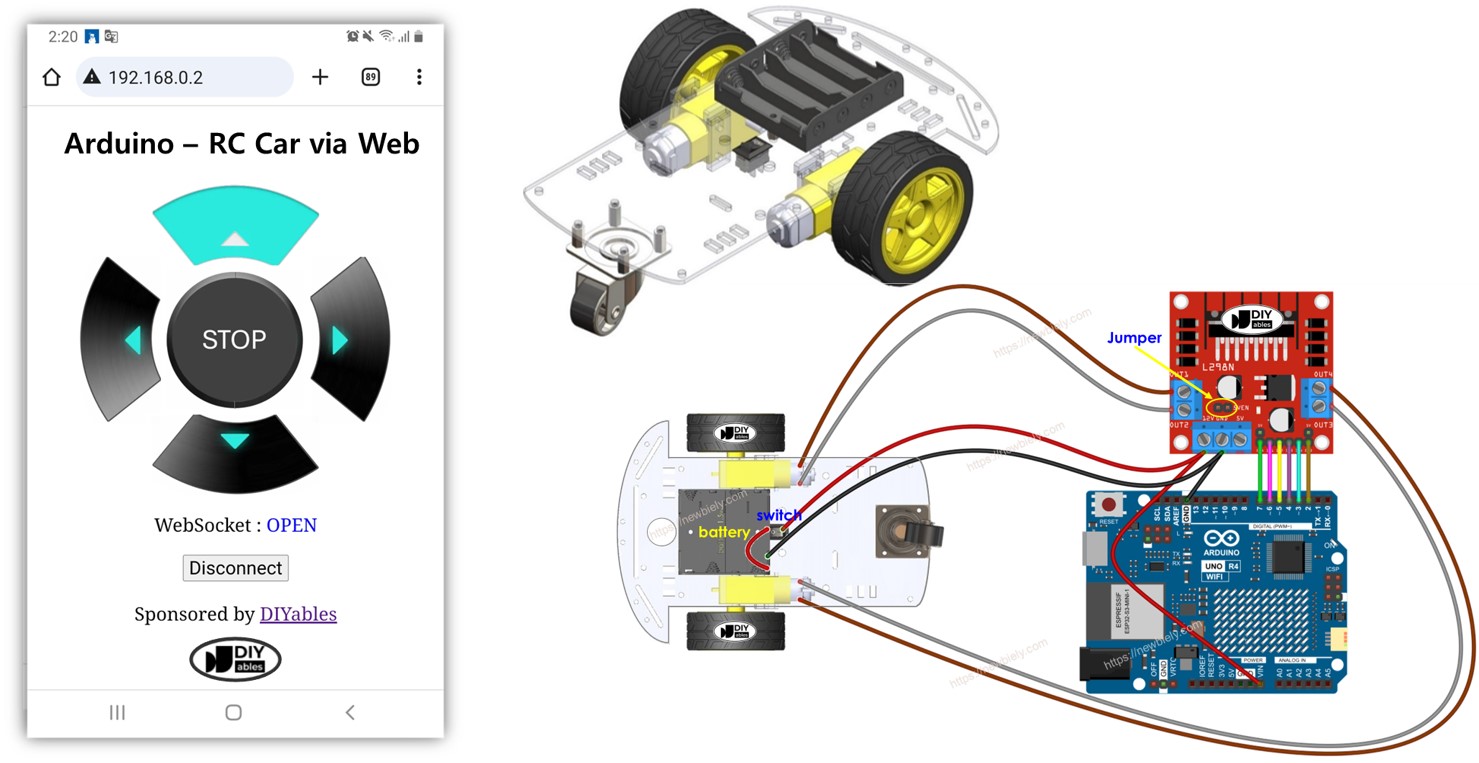
Ce tutoriel vous explique comment contrôler une voiture-robot RC à deux roues motrices via le web en utilisant l'Arduino Uno R4 WiFi. Dans ce guide, nous vous guiderons à travers les étapes pour configurer et contrôler votre voiture-robot à distance, en utilisant les puissantes capacités de l'Arduino Uno R4 avec WiFi intégré. À la fin de ce tutoriel, vous apprendrez :
- Pourquoi WebSocket est nécessaire pour contrôler la voiture RC.
- Comment connecter votre voiture robotisée à deux roues motrices (2WD) à l'Arduino Uno R4 WiFi.
- Comment programmer l'Arduino Uno R4 WiFi pour fournir une interface Web qui vous permet de faire tourner votre voiture robotisée vers la gauche ou la droite, et de la faire avancer ou reculer.
Ce tutoriel est parfait pour les amateurs, les étudiants et toute personne intéressée par la robotique et les systèmes de contrôle basés sur le web. Que vous soyez débutant ou que vous ayez une certaine expérience avec Arduino, nos instructions étape par étape vous aideront à atteindre votre objectif de contrôler à distance votre voiture RC à deux roues motrices.
Commençons ce voyage passionnant qui associe la robotique et la technologie web !
Préparation du matériel
Ou vous pouvez acheter les kits suivants:
| 1 | × | Kit de Démarrage DIYables STEM V4 IoT (Arduino inclus) | |
| 1 | × | Kit de Capteurs DIYables (18 capteurs/écrans) |
Pourquoi faut-il WebSocket pour contrôler la voiture RC ?
- Sans WebSocket, vous devrez actualiser la page à chaque fois que vous voudrez changer la direction de la voiture. Cette méthode n'est pas très efficace.
- Avec WebSocket, une connexion dédiée est créée entre la page Web et l'Arduino UNO R4. Cette configuration vous permet d'envoyer des commandes à l'Arduino UNO R4 sans avoir à actualiser la page. En conséquence, la voiture-robot répond rapidement et avec fluidité. N'est-ce pas incroyable ?
Pour résumer, WebSocket vous permet de contrôler le robot de manière fluide et en temps réel.
Nous proposons des guides détaillés sur l'utilisation de WebSocket avec l'Arduino UNO R4. Pour en savoir plus, consultez les liens fournis : Arduino UNO R4 - WebSocket. tutoriel
Comment cela fonctionne
Le code Arduino UNO R4 crée un serveur Web et un serveur WebSocket. Voici comment cela fonctionne :
- Lorsque vous saisissez l'adresse IP de l'Arduino UNO R4 dans un navigateur, il demande la page Web de l'interface utilisateur à partir de l'Arduino UNO R4. Le serveur Web sur l'Arduino UNO R4 répond en renvoyant le contenu de la page composé de HTML, CSS et JavaScript. Votre navigateur affiche ensuite cette page. Le code JavaScript de la page démarre une connexion WebSocket avec le serveur WebSocket de l'Arduino UNO R4. Lorsque cette connexion WebSocket est opérationnelle, toute pression ou relâchement de boutons sur la page envoie des commandes à l'Arduino UNO R4 via cette connexion. Le serveur WebSocket sur l'Arduino UNO R4 reçoit ces commandes et contrôle la voiture robotisée comme indiqué.
Voici un tableau qui affiche les commandes envoyées depuis la page Web vers l'Arduino UNO R4, en fonction de ce que fait l'utilisateur :
| User's Action | Button | Command | Car Action |
|---|---|---|---|
| PRESS | UP | 1 | MOVE FORWARD |
| PRESS | DOWN | 2 | MOVE BACKWARD |
| PRESS | LEFT | 4 | TURN LEFT |
| PRESS | RIGHT | 8 | TURN RIGHT |
| PRESS | STOP | 0 | STOP |
| RELEASE | UP | 0 | STOP |
| RELEASE | DOWN | 0 | STOP |
| RELEASE | LEFT | 0 | STOP |
| RELEASE | RIGHT | 0 | STOP |
| RELEASE | STOP | 0 | STOP |
Schéma de câblage entre une voiture RC à deux roues motrices et Arduino UNO R4
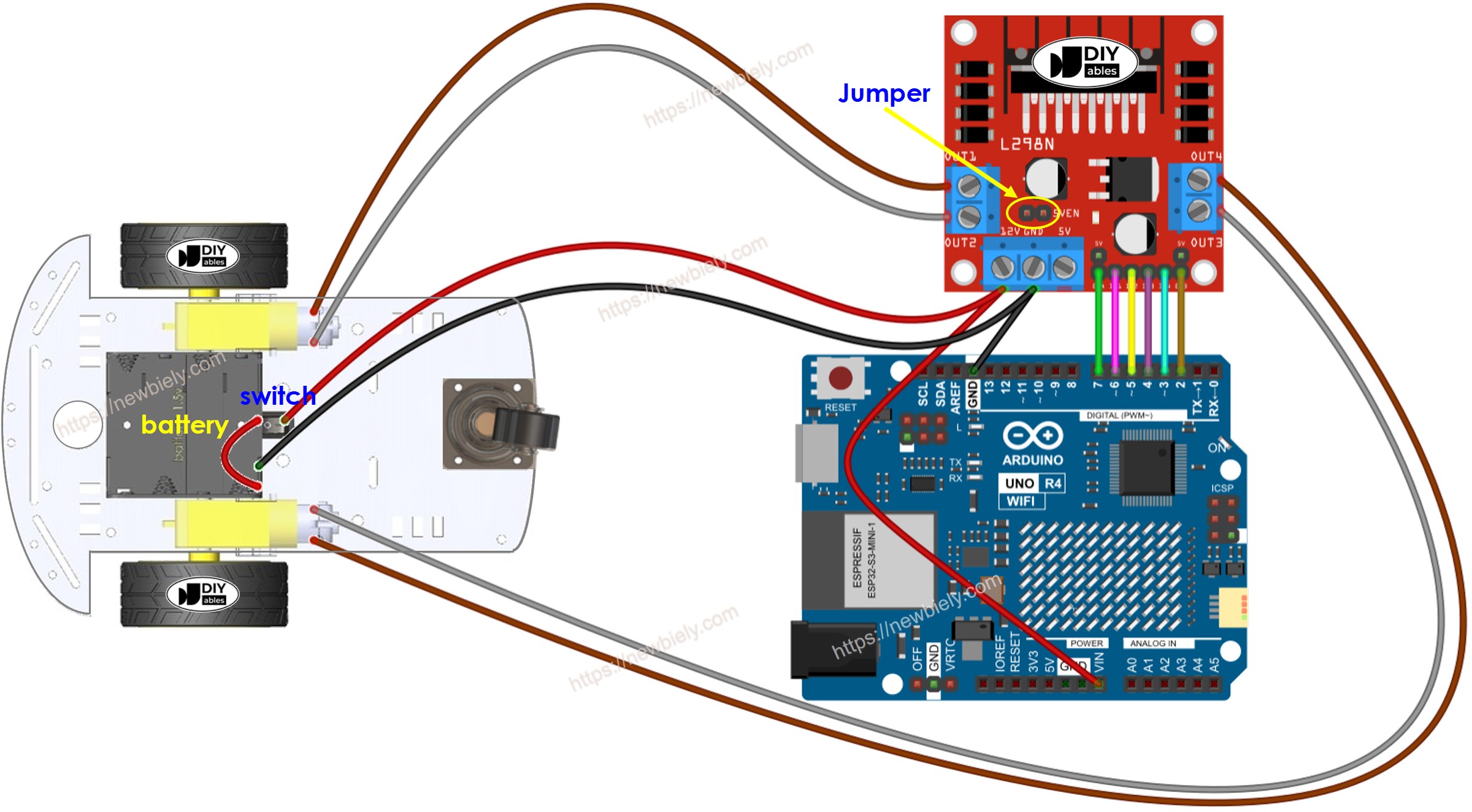
Cette image a été créée avec Fritzing. Cliquez pour agrandir l'image.
Voir Comment alimenter l'Arduino UNO R4..
Normalement, vous auriez besoin de deux sources d'alimentation différentes:
- Un pour le moteur.
- Un autre pour la carte Arduino UNO R4 et le module L298N, qui est utilisé comme pilote de moteur.
Vous pouvez simplifier ce montage en utilisant une seule source d'alimentation - quatre piles de 1,5 V pour obtenir un total de 6 V. Voici comment faire :
- Branchez les batteries sur le module L298N comme indiqué dans les instructions.
- Retirez les deux cavaliers des broches ENA et ENB.
- Placez un cavalier marqué 5VEN (indiqué par un cercle jaune sur le schéma).
- Connectez la broche 12V du module L298N à la broche Vin de l'Arduino UNO R4. Cela alimentera l'Arduino UNO R4 à partir des batteries.
La voiture RC à deux roues motrices dispose d'un interrupteur marche/arrêt. Cela permet de connecter ou déconnecter la batterie à l'aide de l'interrupteur, ce qui met l'alimentation de la voiture sous tension ou hors tension lorsque cela est nécessaire. Si vous préférez quelque chose de plus simple, vous pouvez éviter d'utiliser l'interrupteur.
Arduino UNO R4 Code
Le contenu de la page web (HTML, CSS, JavaScript) est enregistré dans un fichier séparé appelé index.h. Par conséquent, nous utiliserons deux fichiers de code dans l'IDE Arduino.
- Un fichier .ino est un code Arduino UNO R4 qui crée un serveur Web et un serveur WebSocket pour contrôler la voiture.
- Un fichier .h contient le contenu de la page Web.
Étapes rapides
Suivez ces instructions étape par étape :
- Si c'est la première fois que vous utilisez l'Arduino Uno R4 WiFi/Minima, consultez le tutoriel sur Arduino UNO R4 - Installation du logiciel..
- Connectez la carte Arduino Uno R4 à votre ordinateur à l'aide d'un câble USB.
- Lancez l'IDE Arduino sur votre ordinateur.
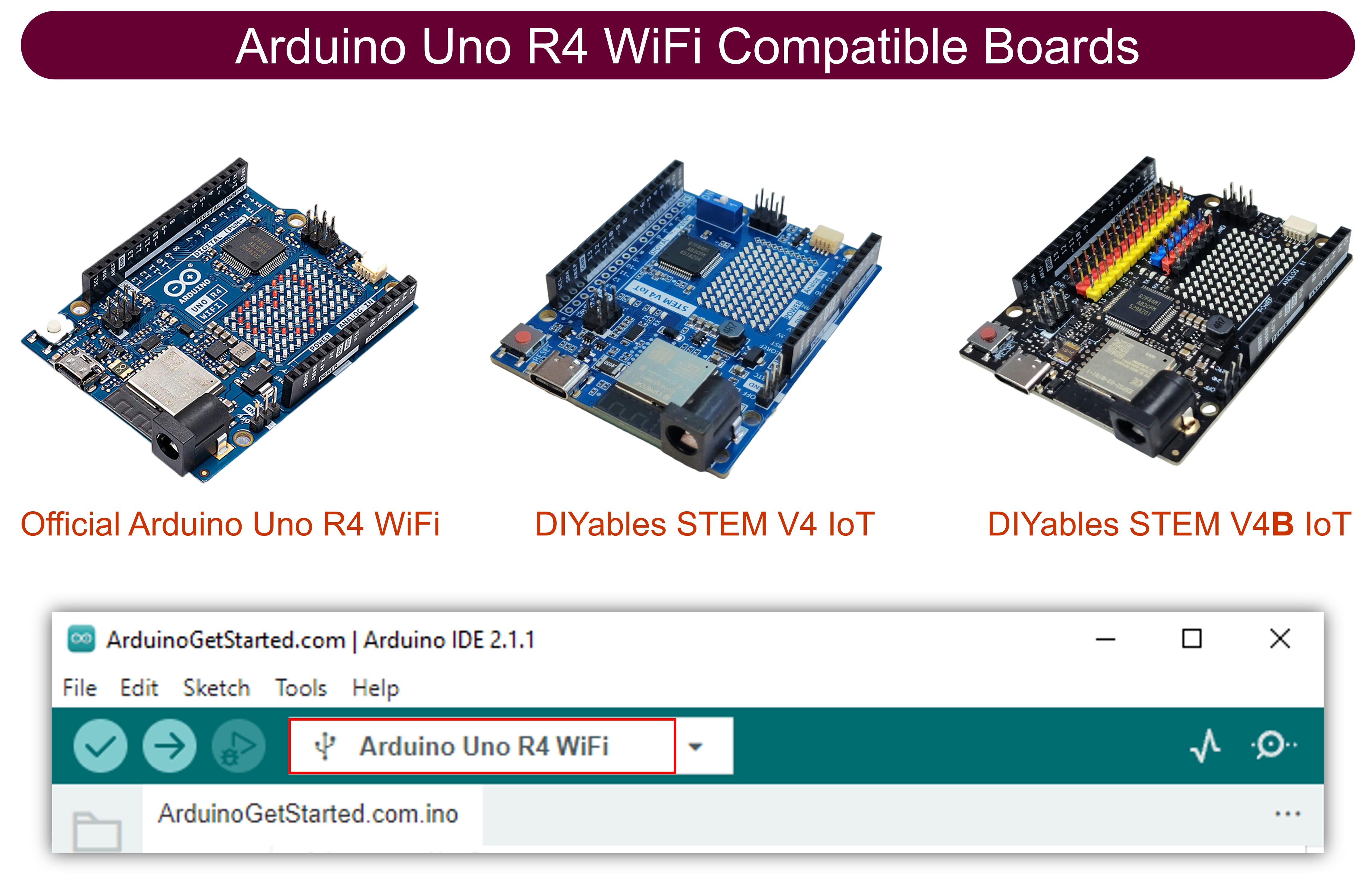
- Sélectionnez la carte Arduino Uno R4 appropriée (par exemple, Arduino Uno R4 WiFi) et le port COM.
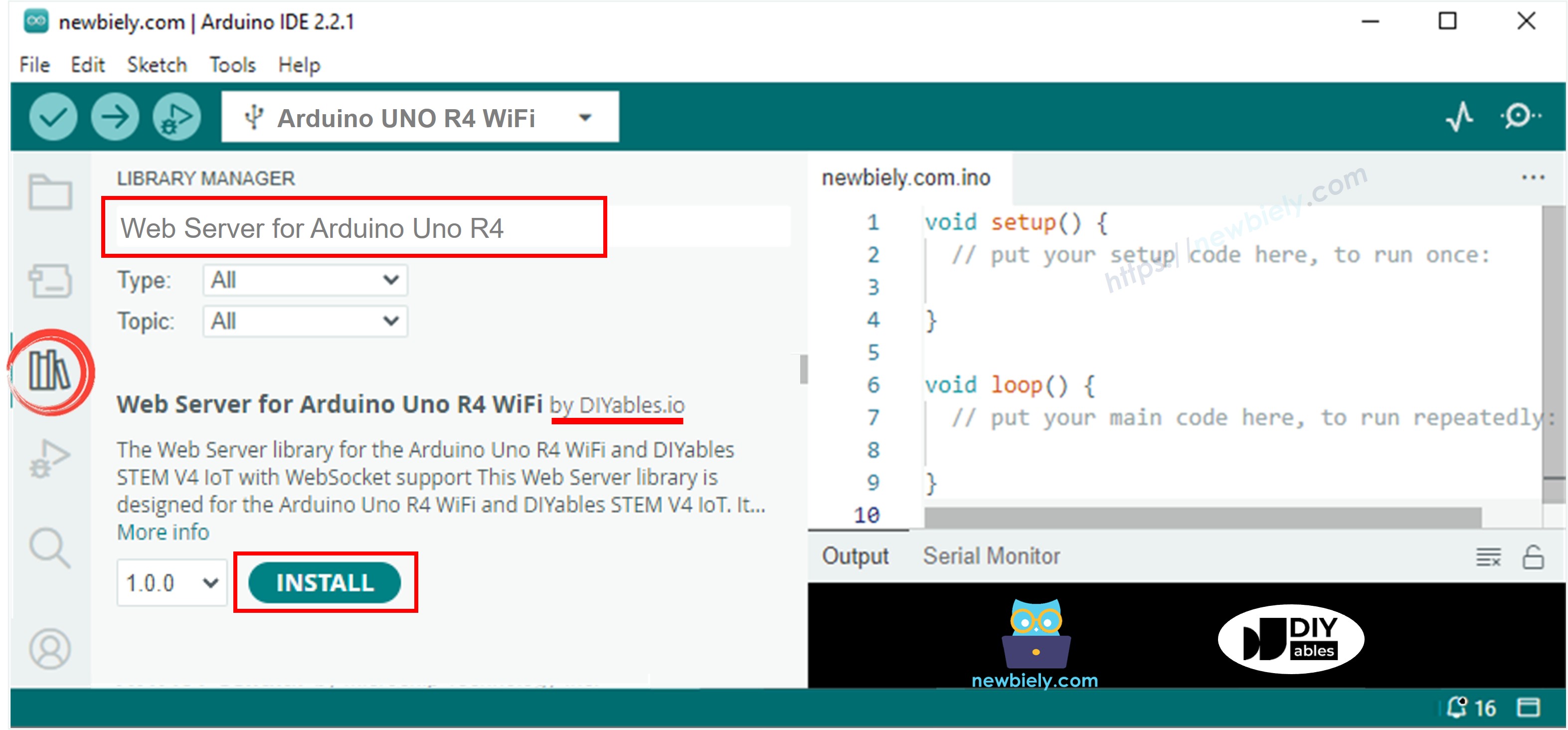
- Ouvrez le Gestionnaire de bibliothèques en cliquant sur l'icône Gestionnaire de bibliothèques sur le côté gauche de l'IDE Arduino.
- Recherchez Web Server for Arduino Uno R4 WiFi et localisez la bibliothèque Web Server créée par DIYables.
- Cliquez sur le bouton Install pour installer la bibliothèque Web Server.
- Dans l'IDE Arduino, créez un nouveau sketch et nommez-le, par exemple, newbiely.com.ino
- Copiez le code suivant et ouvrez-le avec l’IDE Arduino
- Modifiez les paramètres WiFi (SSID et mot de passe) dans le programme pour utiliser les informations de votre réseau.
- Créez le fichier nommé index.h dans l'IDE Arduino en effectuant l'une des actions suivantes :
- Cliquez sur le bouton situé sous l'icône du moniteur série et sélectionnez Nouvel onglet, ou appuyez sur Ctrl+Shift+N sur votre clavier.
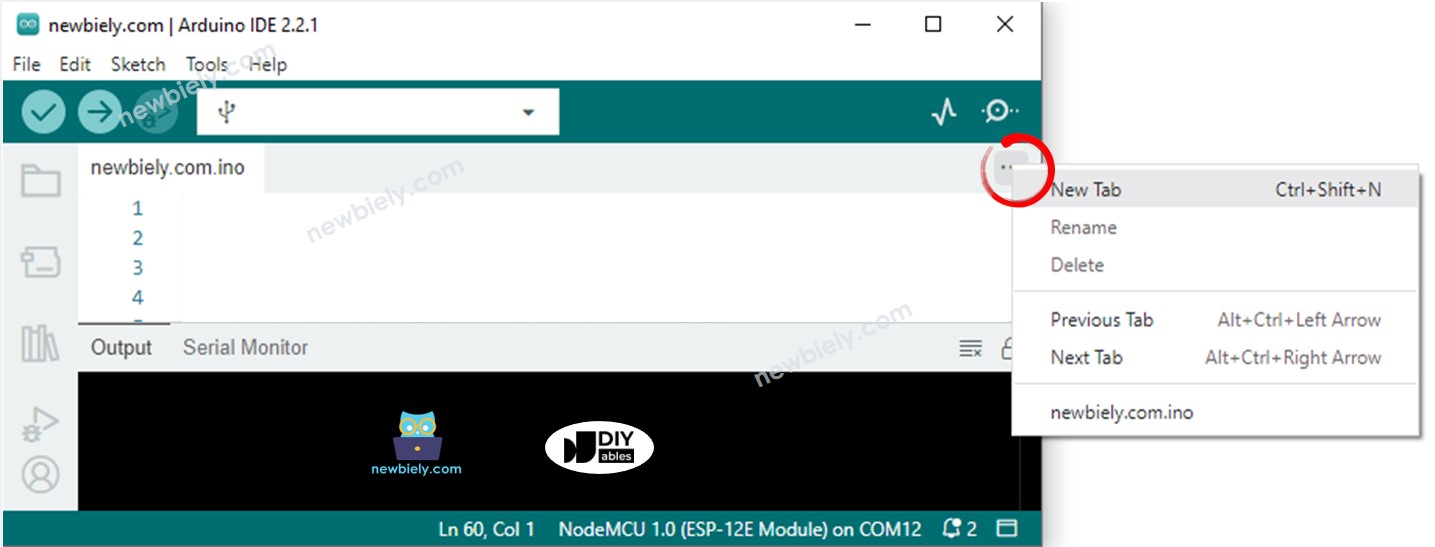
- Nommez le fichier index.h et appuyez sur le bouton OK.
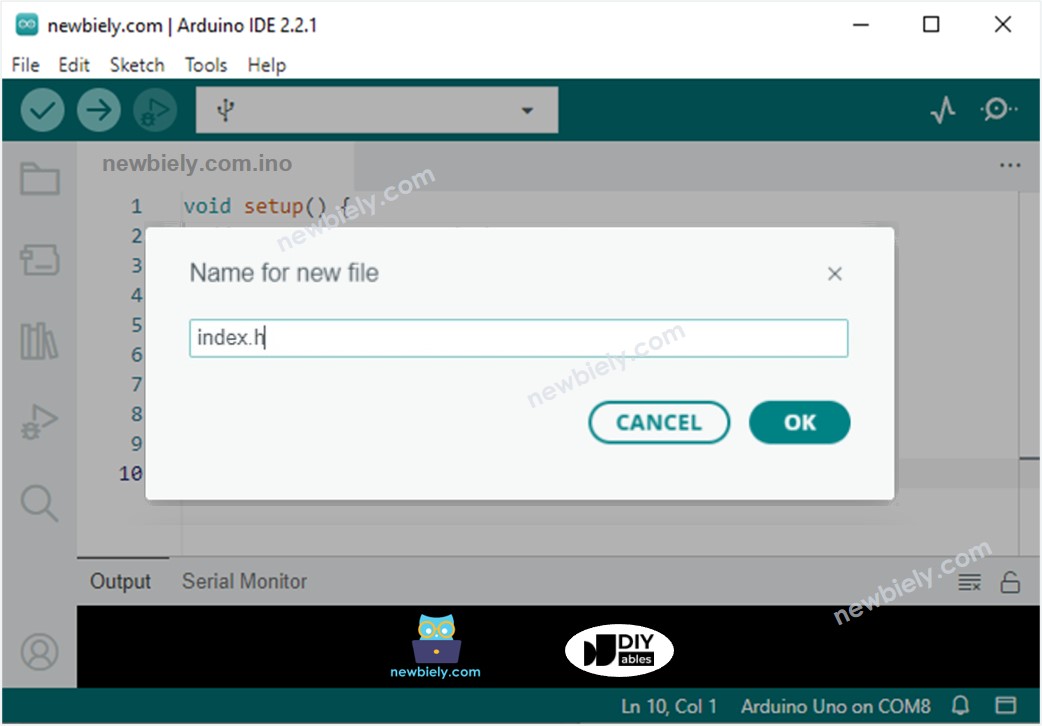
- Copiez le code suivant et collez-le dans le fichier index.h.
- Vous avez désormais le code dans deux fichiers nommés newbiely.com.ino et index.h.
- Cliquez sur le bouton Upload dans l'IDE Arduino pour charger votre code sur l'Arduino UNO R4.
- Ouvrez le Moniteur série.
- Regardez les résultats affichés sur le Moniteur série.
- Notez l'adresse IP affichée et saisissez-la dans la barre d'adresse d'un navigateur sur votre smartphone ou votre ordinateur.
- La page Web apparaîtra comme suit :
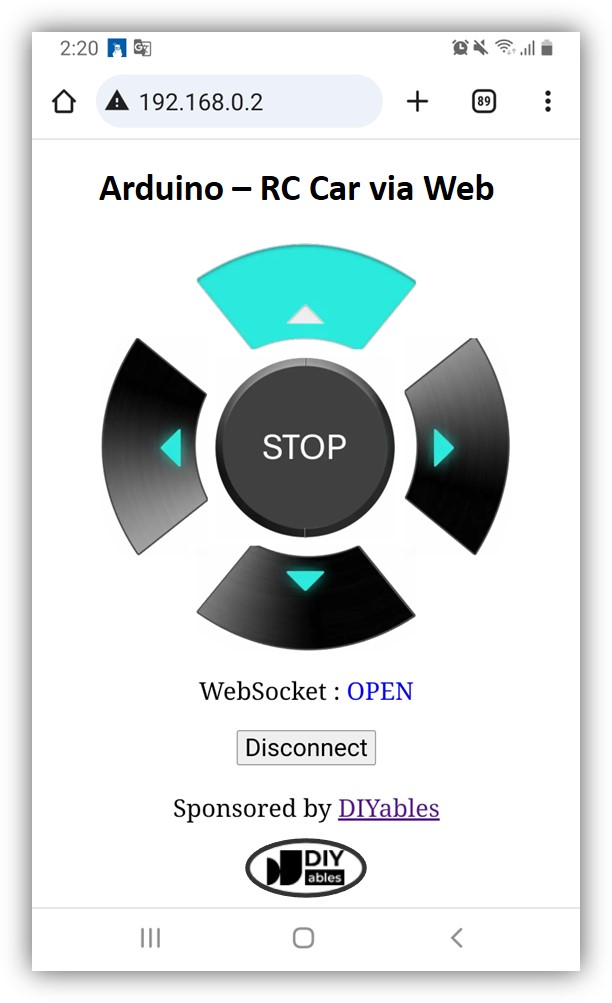
- Appuyez sur le bouton CONNECT pour établir la liaison entre la page Web et l'Arduino UNO R4 via WebSocket.
- Vous pouvez désormais diriger la voiture pour tourner à gauche ou à droite, et avancer ou reculer en utilisant l'interface Web.
Les images des boutons de contrôle ne sont pas enregistrées sur l'Arduino UNO R4 afin d'économiser sa mémoire. Au lieu de cela, elles sont stockées en ligne. Par conséquent, votre téléphone ou votre ordinateur doit être connecté à Internet pour charger ces images sur la page de contrôle Web.
※ Note:
Si vous modifiez le HTML dans le fichier nommé index.h mais ne modifiez rien dans le fichier nommé newbiely.com.ino, alors lorsque vous compilez et téléversez le code vers l'Arduino UNO R4, l'IDE Arduino ne mettra pas à jour le contenu HTML. Pour que l'IDE Arduino mette à jour le contenu HTML, vous devez apporter un petit changement dans le fichier newbiely.com.ino, comme ajouter une ligne vide ou un commentaire.
Explication du code ligne par ligne
Le code Arduino UNO R4 fourni comprend des explications pour chaque ligne. Assurez-vous de lire les commentaires dans le code !
Dépannage pour Arduino Uno R4
Si le code ci-dessus fonctionne, veuillez mettre à jour la version la plus récente du module WiFi de l'Arduino UNO R4.
- Connectez votre Arduino Uno R4 WiFi à votre PC
- Ouvrez Arduino IDE 2
- Accédez à Outils Mise à jour du micrologiciel
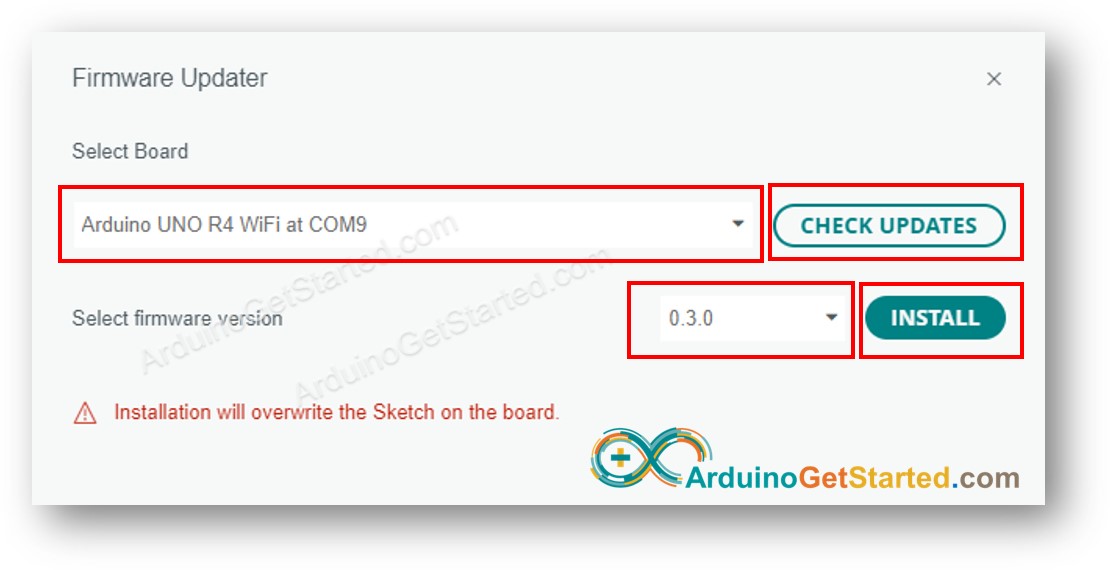
- Sélectionnez la carte Arduino Uno R4 WiFi et le port
- Cliquez sur le bouton VÉRIFIER LES MISES À JOUR
- Une liste des versions du firmware disponibles apparaîtra
- Sélectionnez la version la plus récente du firmware
- Cliquez sur le bouton INSTALLER
- Attendez que ce soit terminé
- Redémarrez votre Arduino Uno R4 WiFi
- Recompilez et téléversez votre code sur l'Arduino Uno R4 WiFi
- Vérifiez le résultat