Arduino UNO R4 - Actionneur
Découvrez comment utiliser l'Arduino Uno R4 pour contrôler un actionneur linéaire dans ce tutoriel facile ! Parfait pour les débutants, ce guide vous montre comment utiliser un pilote L298N pour des projets de bricolage amusants. Voici ce que vous allez apprendre :
- Ce qu'est un actionneur linéaire et comment il se déplace
- Des étapes simples pour étendre ou rétracter l'actionneur
- Câblage facile avec le pilote L298N
- Un code Arduino clair pour piloter l'actionneur
- Comment modifier la vitesse de l'actionneur pour qu'il se déplace plus vite ou plus lentement
Ce tutoriel porte sur les actionneurs linéaires sans rétroaction. Si vous souhaitez en savoir plus sur les actionneurs linéaires avec rétroaction, consultez notre guide Arduino UNO R4 - Actionneur avec rétroaction.. Suivez ce projet Arduino facile pour construire votre propre système d'automatisation intelligent !
Préparation du matériel
Ou vous pouvez acheter les kits suivants:
| 1 | × | Kit de Démarrage DIYables STEM V4 IoT (Arduino inclus) | |
| 1 | × | Kit de Capteurs DIYables (18 capteurs/écrans) |
À propos de l'actionneur linéaire
Schéma des broches de l'actionneur linéaire
Un actionneur linéaire est livré avec deux fils.
- Fil positif : souvent rouge
- Fil négatif : souvent noir

Comment cela fonctionne
Lors de l'achat d'un actionneur linéaire, il est important de comprendre sur quelle tension il fonctionne. Par exemple, considérez un actionneur linéaire qui utilise 12 volts.
Lorsque vous connectez l'actionneur linéaire de 12 V à une alimentation de 12 V :
- Connectez 12 V au fil positif et la masse au fil négatif : l'actionneur linéaire se déploie complètement à grande vitesse jusqu'à ce qu'il atteigne sa fin de course.
- Connectez 12 V au fil négatif et la masse au fil positif : l'actionneur linéaire se rétracte complètement à grande vitesse jusqu'à ce qu'il atteigne sa fin de course.
Lorsque vous coupez l'alimentation de l'actionneur en reliant les fils positifs et négatifs à la masse, l'actionneur cessera de se déplacer vers l'intérieur ou vers l'extérieur.
※ Note:
Pour les moteurs à courant continu, les servomoteurs et les moteurs pas à pas sans engrenages, ils ne peuvent pas maintenir leur position lorsque l'alimentation est coupée et qu'ils portent une charge. Cependant, un actionneur peut maintenir sa position même sans alimentation lorsqu'il porte une charge.
Si nous utilisons une tension inférieure à 12 V pour les actionneurs linéaires, ils fonctionnent toujours mais pas à leur vitesse maximale. Cela montre que faire varier la tension d'alimentation peut ajuster la vitesse de l'actionneur linéaire. Cependant, contrôler la tension avec précision est difficile, donc cette méthode n'est pas couramment utilisée. Au lieu de cela, la tension est maintenue constante et la vitesse de l'actionneur linéaire est contrôlée à l'aide d'un signal PWM. Lorsque le rapport cyclique du PWM est plus élevé, l'actionneur linéaire se déplace plus rapidement.

Comment contrôler un actionneur linéaire avec Arduino Uno R4
Pour contrôler un actionneur linéaire, nous voulons généralement :
- Faites-le s’étendre (se déployer) à pleine vitesse
- Faites-le se rétracter (revenir vers l’intérieur) à pleine vitesse
- (Optionnel) Contrôlez la vitesse à laquelle il se déplace vers l’extérieur ou vers l’intérieur
L'Arduino peut envoyer des signaux de contrôle, mais ces signaux sont trop faibles (en tension et en courant) pour actionner directement l'actionneur. C’est pourquoi nous avons besoin d’un driver entre l’Arduino et l’actionneur.
Le chauffeur accomplit deux tâches principales :
- Cela amplifie le signal de l'Arduino afin de pouvoir alimenter l'actionneur.
- Cela inverse la direction du courant (en changeant la polarité) en fonction d'un autre signal de l'Arduino — cela contrôle si l'actionneur se déploie ou se rétracte.
※ Note:
- Vous pouvez utiliser ce guide pour tout actionneur linéaire. Nous prenons comme exemple un actionneur linéaire de 12 V.
- Lors de l'utilisation d'un actionneur linéaire de 5 V avec un Arduino UNO R4, bien que les deux fonctionnent sous 5 V, vous devez ajouter un pilote. C'est parce que l'Arduino UNO R4 ne peut pas fournir suffisamment de courant pour l'actionneur.
Ce guide utilise le pilote L298N, mais il existe divers autres puces et modules, comme le L293D, qui peuvent aussi contrôler des actionneurs linéaires.
À propos du pilote L298N
Le pilote L298N peut contrôler des dispositifs tels que des actionneurs linéaires, des moteurs à courant continu et des moteurs pas à pas. Dans ce tutoriel, nous allons montrer comment l'utiliser pour contrôler un actionneur linéaire.
Schéma des broches du pilote L298N
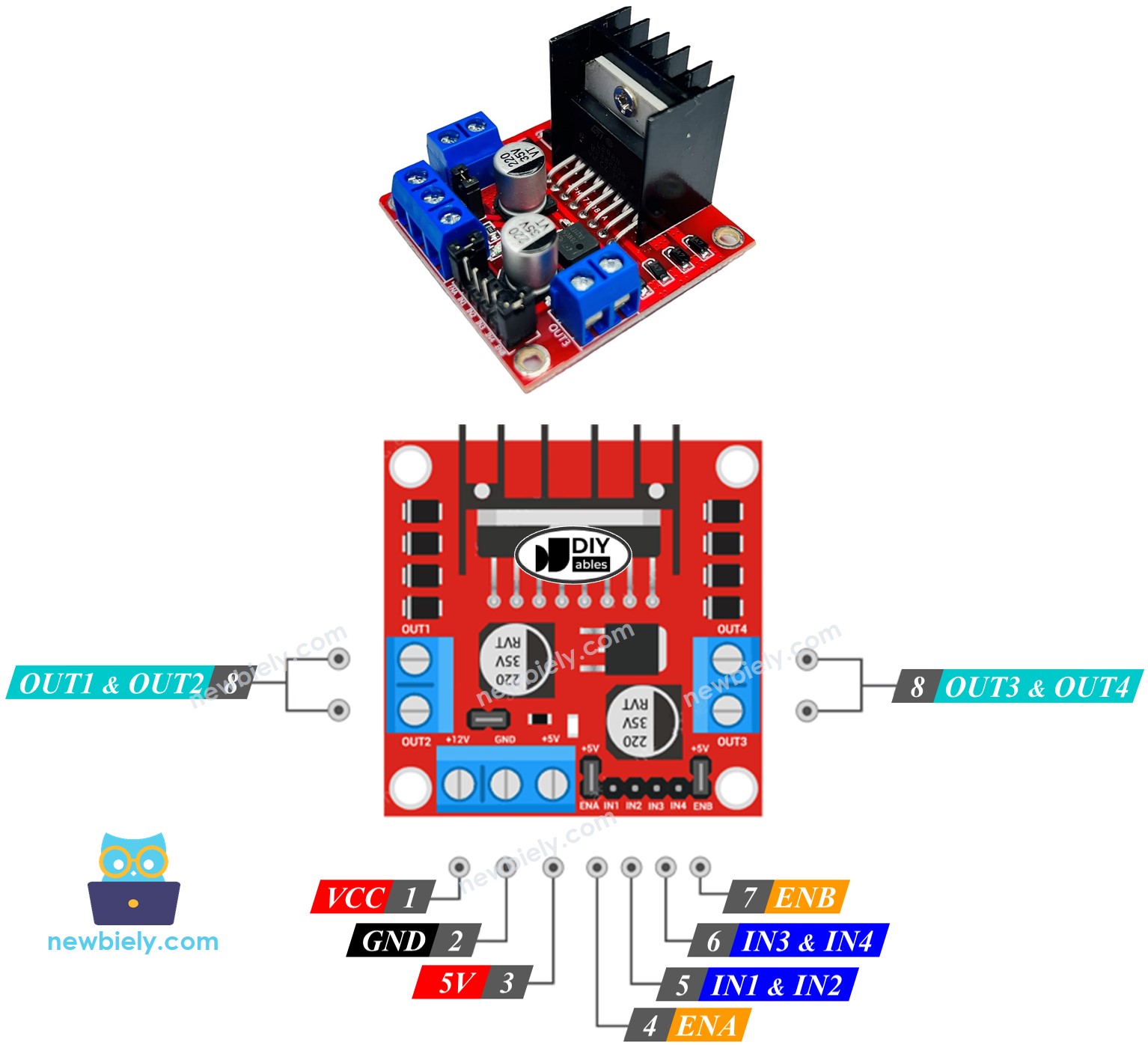
Le pilote L298N dispose de deux canaux distincts, appelés canal A et canal B. Cette configuration permet au pilote L298N de gérer deux actionneurs linéaires différents de manière indépendante et simultanée. Supposons que l'actionneur linéaire A soit connecté au canal A et que l'actionneur linéaire B soit connecté au canal B. Le pilote L298N comporte 13 broches.
Les broches communes aux deux canaux:
- Broche VCC : alimente l'actionneur linéaire. Elle accepte une plage de 5 à 35 V.
- Broche GND : sert de masse commune et doit être reliée à GND (0 V).
- Broche 5V : alimente le module L298N. Vous pouvez utiliser du 5 V provenant d'un Arduino UNO R4 pour cela.
Épingles du canal A:
- Broches ENA : aident à gérer la vitesse à laquelle l'actionneur linéaire A se déplace. Si vous débranchez le cavalier et reliez cette broche à une entrée PWM, vous pouvez ajuster la vitesse à laquelle il s'étend ou se rétracte.
- Broches IN1 et IN2 : déterminent la direction dans laquelle l'actionneur linéaire se déplace. Si l'une des broches est à un niveau élevé et l'autre à un niveau bas, l'actionneur s'étendra ou se rétractera. Si les deux broches sont à un niveau élevé ou à un niveau bas, l'actionneur cesse de bouger.
- Broches OUT1 et OUT2 : sont reliées à l'actionneur linéaire A.
Broches du Canal B:
- Broches ENB : Ces broches ajustent la vitesse de l'actionneur linéaire B. Débranchez le cavalier et utilisez une entrée PWM avec cette broche pour contrôler la vitesse à laquelle l'actionneur linéaire B s'étend ou se rétracte.
- Broches IN3 et IN4 : Ces broches déterminent la direction du mouvement de l'actionneur linéaire. Si l'une des broches est à un niveau logique élevé et l'autre à un niveau logique bas, l'actionneur linéaire s'étendra ou se rétractera. Si les deux broches sont à un niveau logique élevé ou à un niveau logique bas, l'actionneur linéaire s'arrêtera.
- Broches OUT3 et OUT4 : Elles sont connectées à un actionneur linéaire.
Le pilote L298N dispose de deux types d'alimentation d'entrée:
- Pour l'actionneur linéaire (broches VCC et GND) : de 5 à 35 V.
- Pour le fonctionnement interne du module L298N (broches 5V et GND) : de 5 à 7 V.
Le module L298N est livré avec trois cavaliers pour des usages spéciaux ou différents. Pour simplifier, veuillez retirer tous les cavaliers du module L298N.
Nous pouvons gérer deux actionneurs linéaires de manière indépendante et simultanée en utilisant une carte Arduino UNO R4 et un pilote L298N. Pour faire fonctionner chaque actionneur linéaire, il faut seulement trois broches de l'Arduino UNO R4.
※ Note:
Cette partie du guide explique comment utiliser le canal A pour contrôler un actionneur linéaire. Le contrôle d'un autre actionneur linéaire fonctionne de manière similaire.
Commenter un actionneur linéaire
Nous allons apprendre à utiliser le pilote L298N pour contrôler un actionneur linéaire.
Schéma de câblage
Avant de commencer le câblage, retirez les trois cavaliers du module L298N.
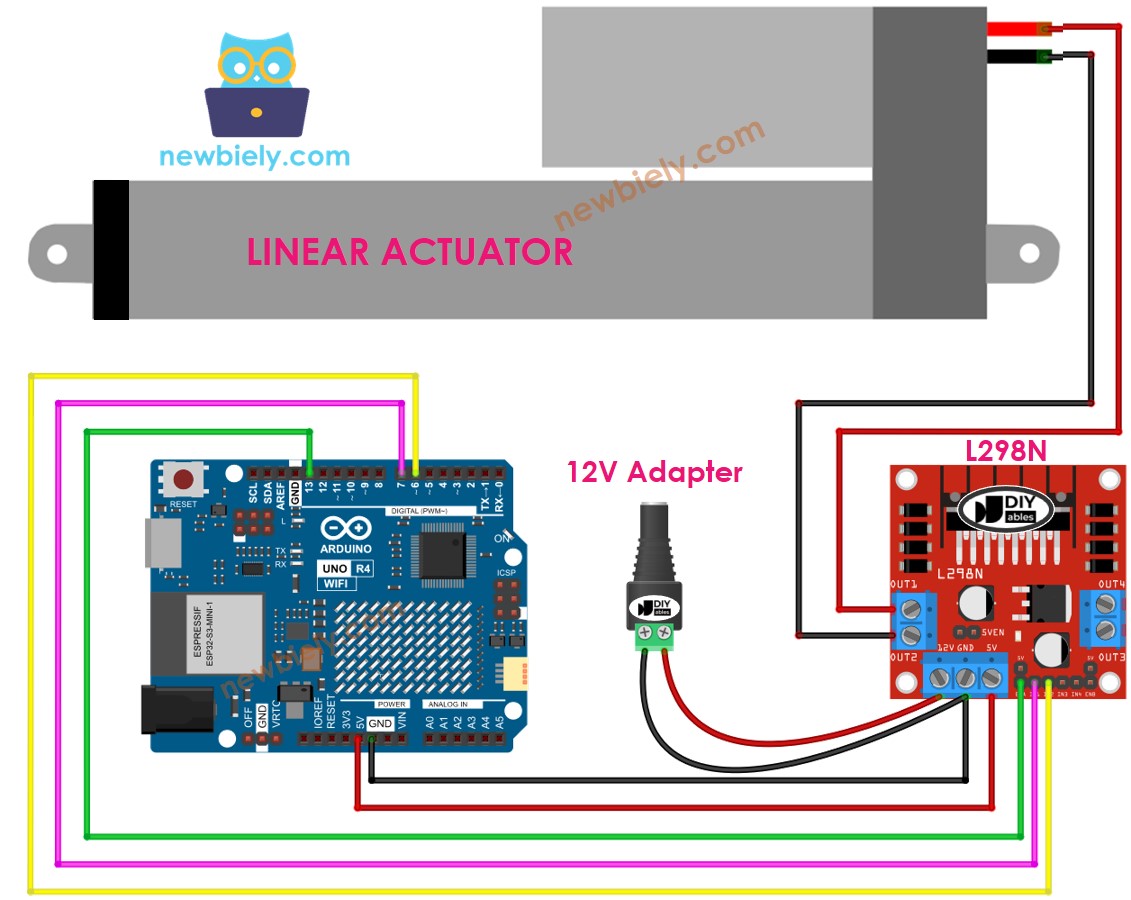
Cette image a été créée avec Fritzing. Cliquez pour agrandir l'image.
Voir Comment alimenter l'Arduino UNO R4..
Comment faire étendre/rétracter un actionneur linéaire
Vous pouvez contrôler la direction d'un actionneur linéaire en configurant les broches IN1 et IN2 sur HIGH ou LOW. Le tableau ci-dessous montre comment faire cela pour les deux canaux.
| IN1 pin | IN2 pin | Direction |
|---|---|---|
| LOW | LOW | Linear Actuator A stops |
| HIGH | HIGH | Linear Actuator A stops |
| HIGH | LOW | Linear Actuator A extends |
| LOW | HIGH | Linear Actuator A retracts |
- Allonge l'actionneur linéaire A
- L'actionneur linéaire A se rétracte.
※ Note:
Si les broches OUT1 et OUT2 sont connectées à l'actionneur linéaire de manière incorrecte, la direction sera inversée. Pour corriger cela, il suffit d'inverser les positions des broches OUT1 et OUT2 ou de modifier les signaux de commande sur les broches IN1 et IN2 dans le programme.
Comment empêcher l'actionneur linéaire de s'allonger ou de se rétracter
L'actionneur linéaire cesse automatiquement de s'étendre ou de se rétracter lorsqu'il atteint son point maximal ou minimal. Nous pouvons également le configurer pour qu'il s'arrête avant d'atteindre ces points.
Il existe deux méthodes pour arrêter un actionneur linéaire.
- Mets la vitesse à zéro
- Place les broches IN1 et IN2 au même niveau (bas ou haut).
- Veuillez vérifier la grammaire et la ponctuation avant de publier ce document.
Comment contrôler la vitesse d'un actionneur linéaire via le pilote L298N
Pour ajuster facilement la vitesse de l'actionneur linéaire, utilisez un signal PWM sur la broche ENA plutôt que de le mettre à un niveau élevé. Voici comment vous pouvez le faire :
- Connectez une broche de l'Arduino UNO R4 à la broche ENA du module L298N.
- Utilisez la fonction analogWrite() pour envoyer un signal PWM à la broche ENA. Le pilote L298N augmentera ce signal pour contrôler l'actionneur linéaire.
La vitesse peut être n'importe quel nombre entre 0 et 255. À la vitesse 0, l'actionneur linéaire s'arrêtera. À la vitesse 255, il se déplace à sa vitesse maximale.
Exemple de code Arduino UNO R4
Ce code réalise les tâches suivantes :
- Sortez l'actionneur aussi rapidement que possible
- Arrêtez l'actionneur
- Rentrez l'actionneur aussi rapidement que possible
- Arrêtez l'actionneur
Étapes rapides
Suivez ces instructions étape par étape :
- Si c'est la première fois que vous utilisez l'Arduino Uno R4 WiFi/Minima, reportez-vous au tutoriel sur Arduino UNO R4 - Installation du logiciel..
- Reliez les composants selon le schéma fourni.
- Connectez la carte Arduino Uno R4 à votre ordinateur à l'aide d'un câble USB.
- Lancez l'IDE Arduino sur votre ordinateur.
- Sélectionnez la carte Arduino Uno R4 appropriée (par exemple, Arduino Uno R4 WiFi) et le port COM.
- Retirez les trois cavaliers du module L298N.
- Collez le code dans l'IDE Arduino.
- Appuyez sur le bouton Upload dans l'IDE Arduino pour transférer le code vers la carte Arduino Uno R4.
- Observez ce qui suit:
- L'actionneur linéaire se déploie et s'arrête lorsqu'il atteint sa limite.
- L'actionneur linéaire maintient sa position pendant un certain temps.
- L'actionneur linéaire se rétracte et s'arrête lorsqu'il atteint sa limite.
- L'actionneur linéaire maintient sa position pendant un certain temps.
- Cette séquence se répète continuellement.
Vidéo
Résumé
Dans ce tutoriel Arduino UNO R4, vous avez appris comment contrôler un actionneur linéaire avec un pilote L298N pour l'automatisation par bricolage. Ce guide facile vous a montré comment faire bouger l'actionneur linéaire dans les deux sens (extension et rétraction), câbler le pilote L298N et modifier sa vitesse à l'aide de la programmation Arduino. Axé sur les actionneurs linéaires sans rétroaction, ce projet Arduino simple vous aide à créer des systèmes d'automatisation intelligents. Maintenant, vous pouvez utiliser ces compétences pour créer vos propres projets de contrôle de mouvement avec Arduino UNO R4!