Arduino UNO R4 WiFi Bluetooth Joystick - Contrôle Directionnel 2D via BLE Tutoriel
Aperçu
L'exemple Bluetooth Joystick fournit un contrôle joystick 2D interactif accessible via l'application DIYables Bluetooth STEM. Conçu pour Arduino UNO R4 WiFi utilisant BLE (Bluetooth Low Energy) pour recevoir les coordonnées X/Y en temps réel (-100 à +100) pour le contrôle directionnel. Parfait pour la navigation de robots, servos pan-tilt, contrôle de moteurs et contrôleurs de jeux.
Remarque : L'Arduino UNO R4 WiFi ne supporte que BLE (Bluetooth Low Energy). Il ne supporte pas le Bluetooth classique. L'application DIYables Bluetooth supporte à la fois BLE et Bluetooth classique sur Android, et BLE sur iOS. Puisque cette carte utilise BLE, l'application fonctionne sur Android et iOS.

Fonctionnalités
- Contrôle 2D : Axes X et Y avec plage -100 à +100
- Sensibilité Configurable : Seuil de mouvement minimum pour déclencher les mises à jour
- Option Auto-Retour : Le joystick peut se recentrer automatiquement quand relâché
- Valeurs Temps Réel : Mises à jour continues de position pendant le glissement
- Fonctionne sur Android & iOS : BLE est supporté sur les deux plateformes
- Pas d'Appairage Requis : BLE se connecte automatiquement sans appairage manuel
- Faible Consommation : BLE consomme moins d'énergie que le Bluetooth classique
Matériel Requis
Ou vous pouvez acheter les kits suivants:
| 1 | × | Kit de Démarrage DIYables STEM V4 IoT (Arduino inclus) | |
| 1 | × | Kit de Capteurs DIYables (18 capteurs/écrans) |
Code Arduino UNO R4 WiFi
Étapes Rapides
Suivez ces instructions étape par étape :
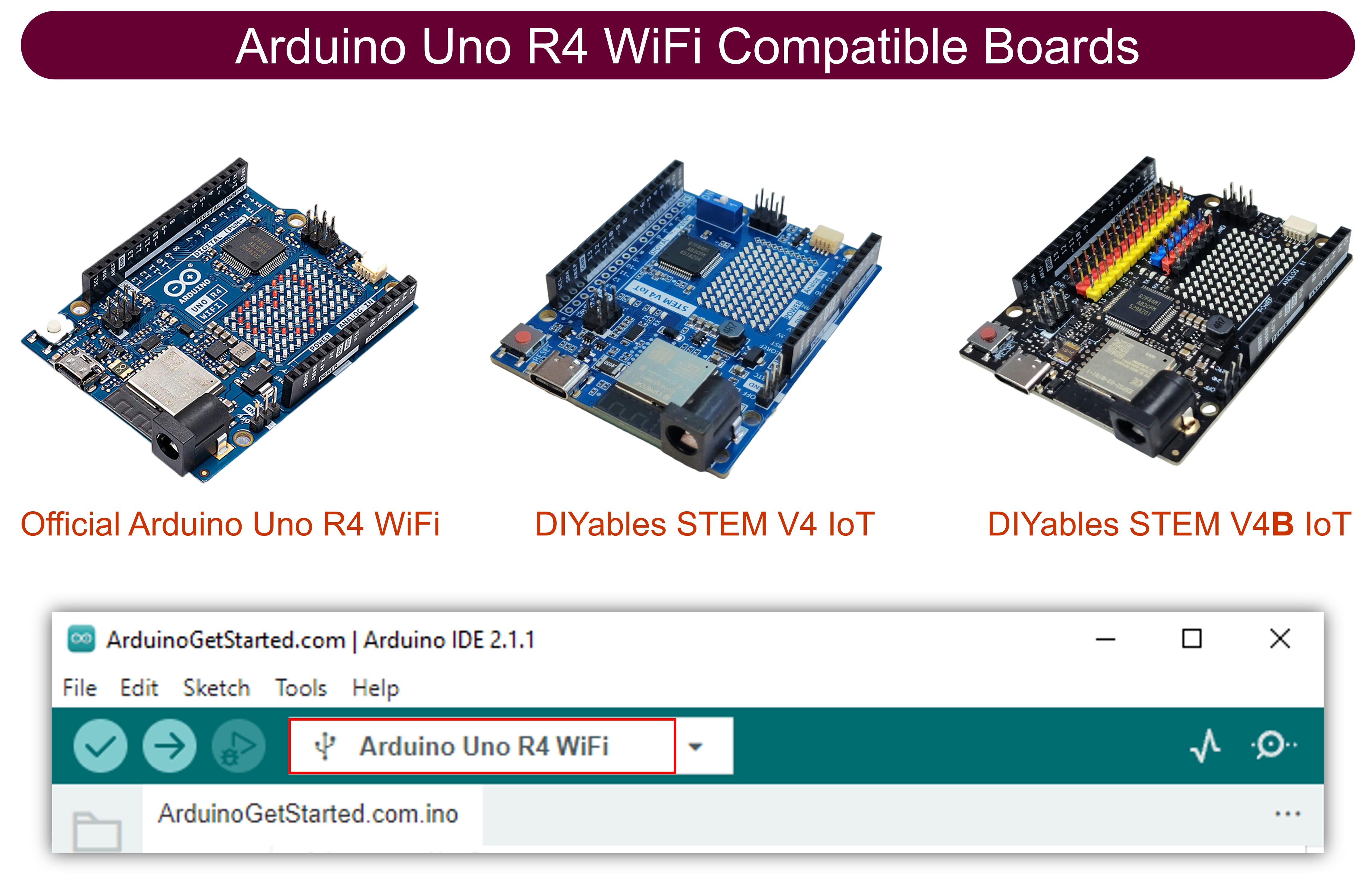
- Si c'est votre première fois avec l'Arduino UNO R4 WiFi, consultez le Arduino UNO R4 - Installation du logiciel..
- Connectez la carte Arduino UNO R4 WiFi à votre ordinateur avec un câble USB.
- Lancez l'IDE Arduino sur votre ordinateur.
- Sélectionnez la carte Arduino UNO R4 WiFi et le port COM approprié.
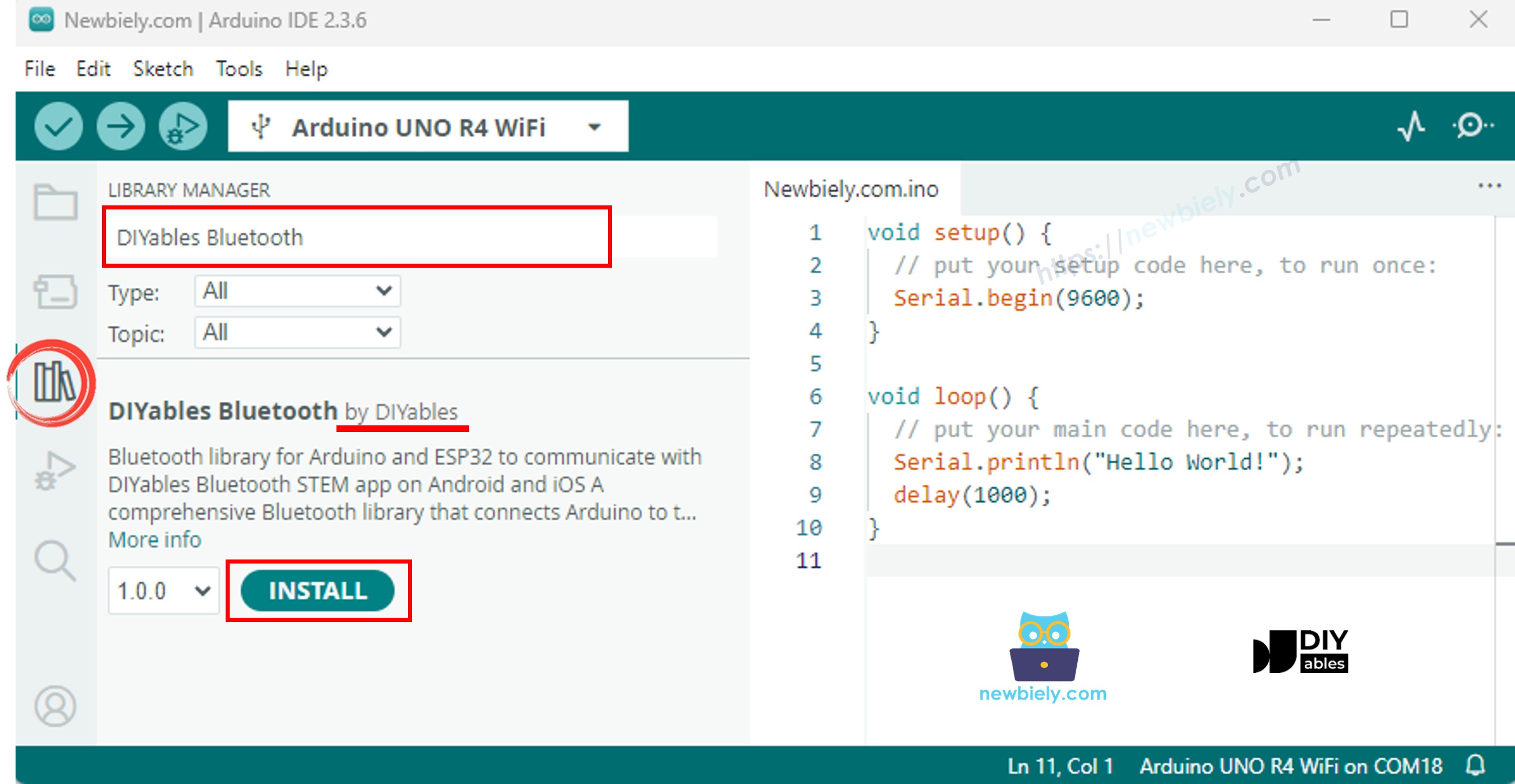
- Naviguez vers l'icône Libraries dans la barre de gauche de l'IDE Arduino.
- Recherchez "DIYables Bluetooth", puis trouvez la bibliothèque DIYables Bluetooth par DIYables
- Cliquez sur le bouton Install pour installer la bibliothèque.
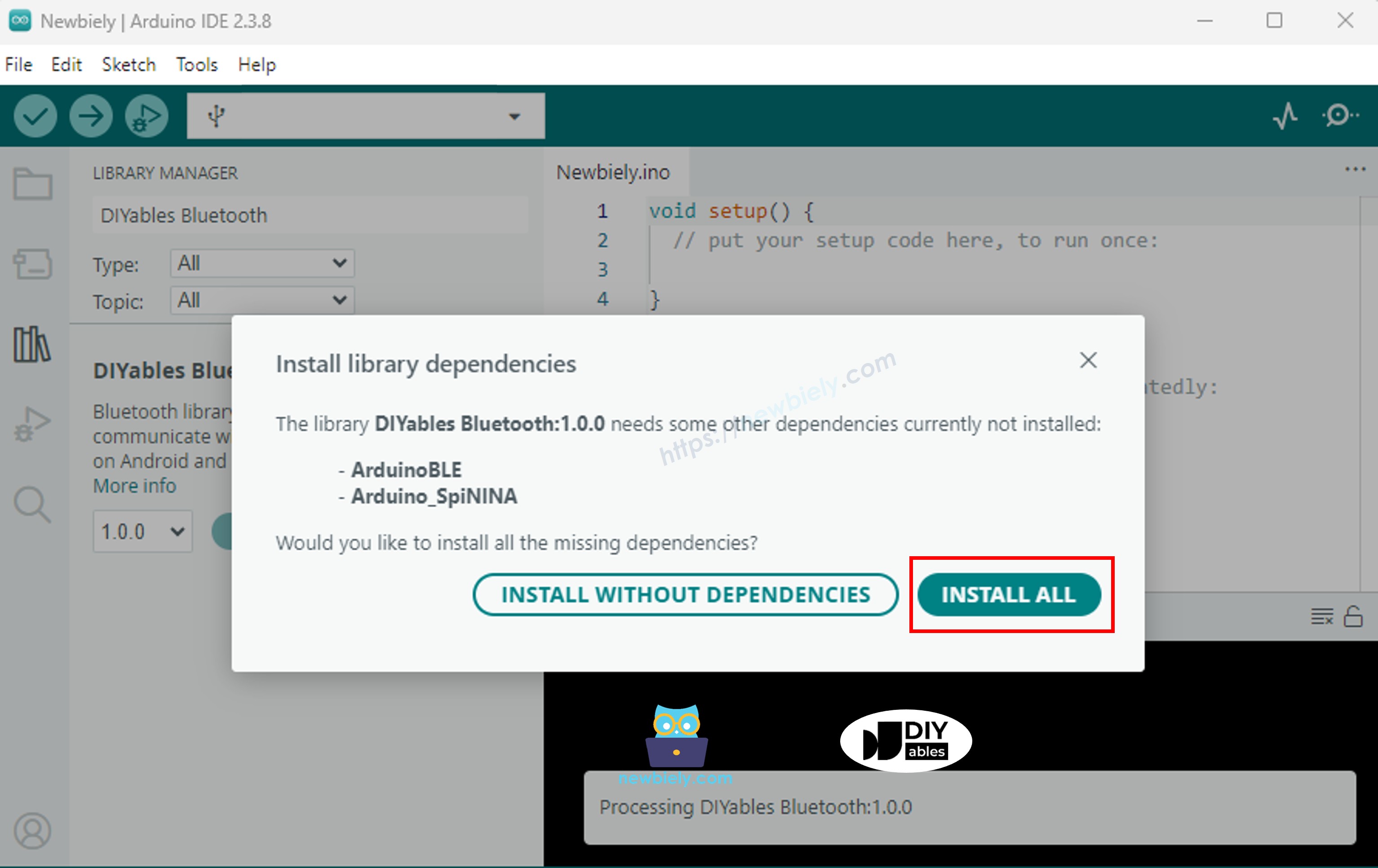
- Il vous sera demandé d'installer d'autres dépendances de bibliothèque
- Cliquez sur le bouton Install All pour installer toutes les dépendances de bibliothèque.
Code BLE
- Dans l'IDE Arduino, allez à File Examples DIYables Bluetooth ArduinoBLE_Joystick exemple, ou copiez le code ci-dessus et collez-le dans l'éditeur de l'IDE Arduino
- Cliquez sur le bouton Upload dans l'IDE Arduino pour téléverser le code vers Arduino UNO R4 WiFi
- Ouvrez le Moniteur Série
- Vérifiez le résultat sur le Moniteur Série. Cela ressemble à ceci :
Application Mobile
Remarque : L'application DIYables Bluetooth supporte à la fois BLE et Bluetooth classique sur Android, et BLE sur iOS. Puisque l'Arduino UNO R4 WiFi utilise BLE, l'application fonctionne sur Android et iOS. Aucun appairage manuel n'est nécessaire pour BLE — scannez et connectez simplement.
- Ouvrez l'application DIYables Bluetooth
- Lors de la première ouverture de l'application, elle demandera des permissions. Veuillez accorder les suivantes :
- Permission Appareils à Proximité (Android 12+) / Permission Bluetooth (iOS) - requise pour scanner et se connecter aux appareils Bluetooth
- Permission Localisation (Android 11 et antérieur seulement) - requise par les anciennes versions Android pour scanner les appareils BLE
- Assurez-vous que le Bluetooth est activé sur votre téléphone
- Sur l'écran d'accueil, appuyez sur le bouton Connect. L'application scannera les appareils BLE.
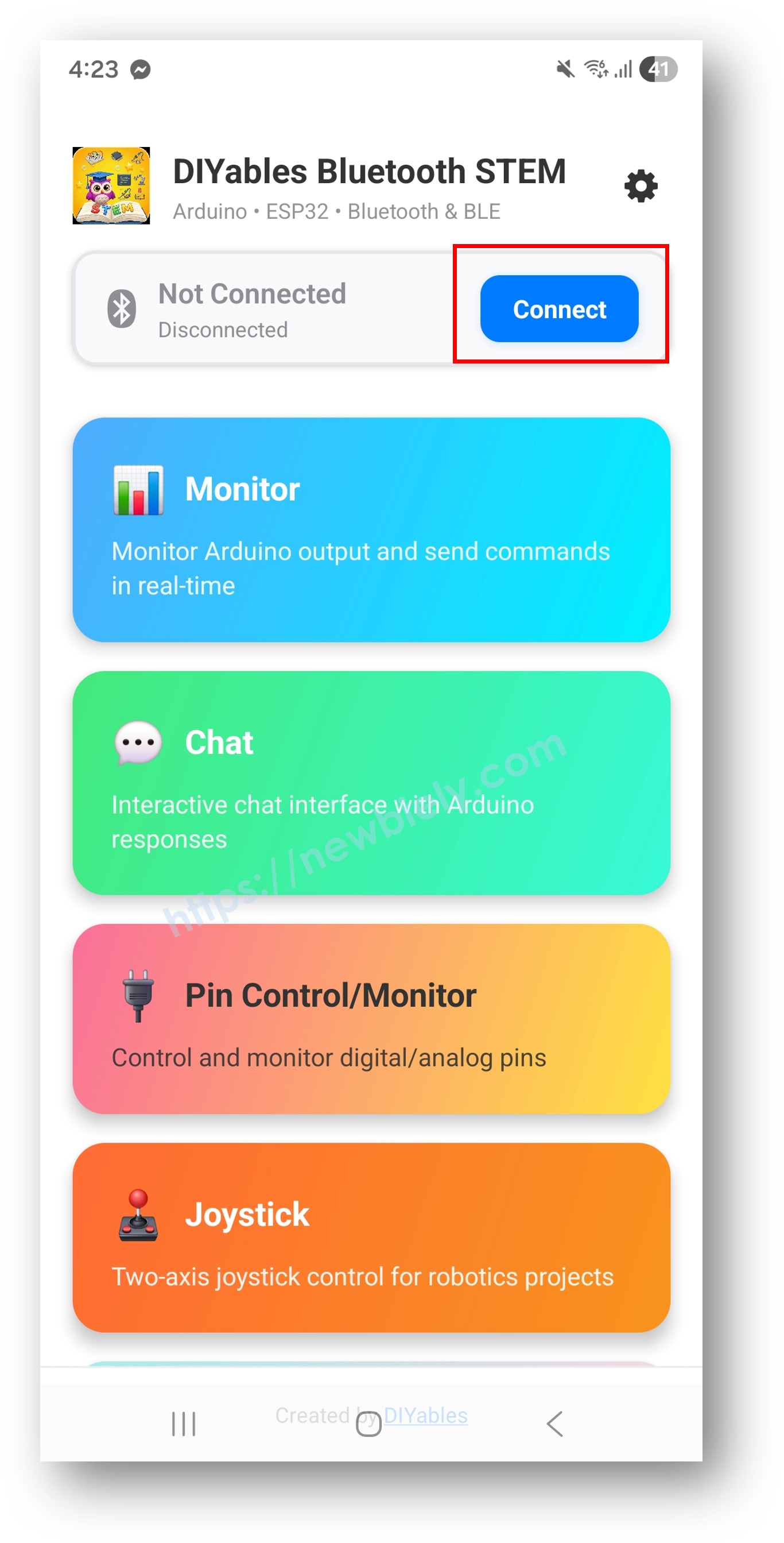
- Trouvez et appuyez sur "Arduino_Joystick" dans les résultats du scan pour vous connecter.
- Une fois connecté, l'application retourne automatiquement à l'écran d'accueil. Sélectionnez l'application Joystick dans le menu des applications.
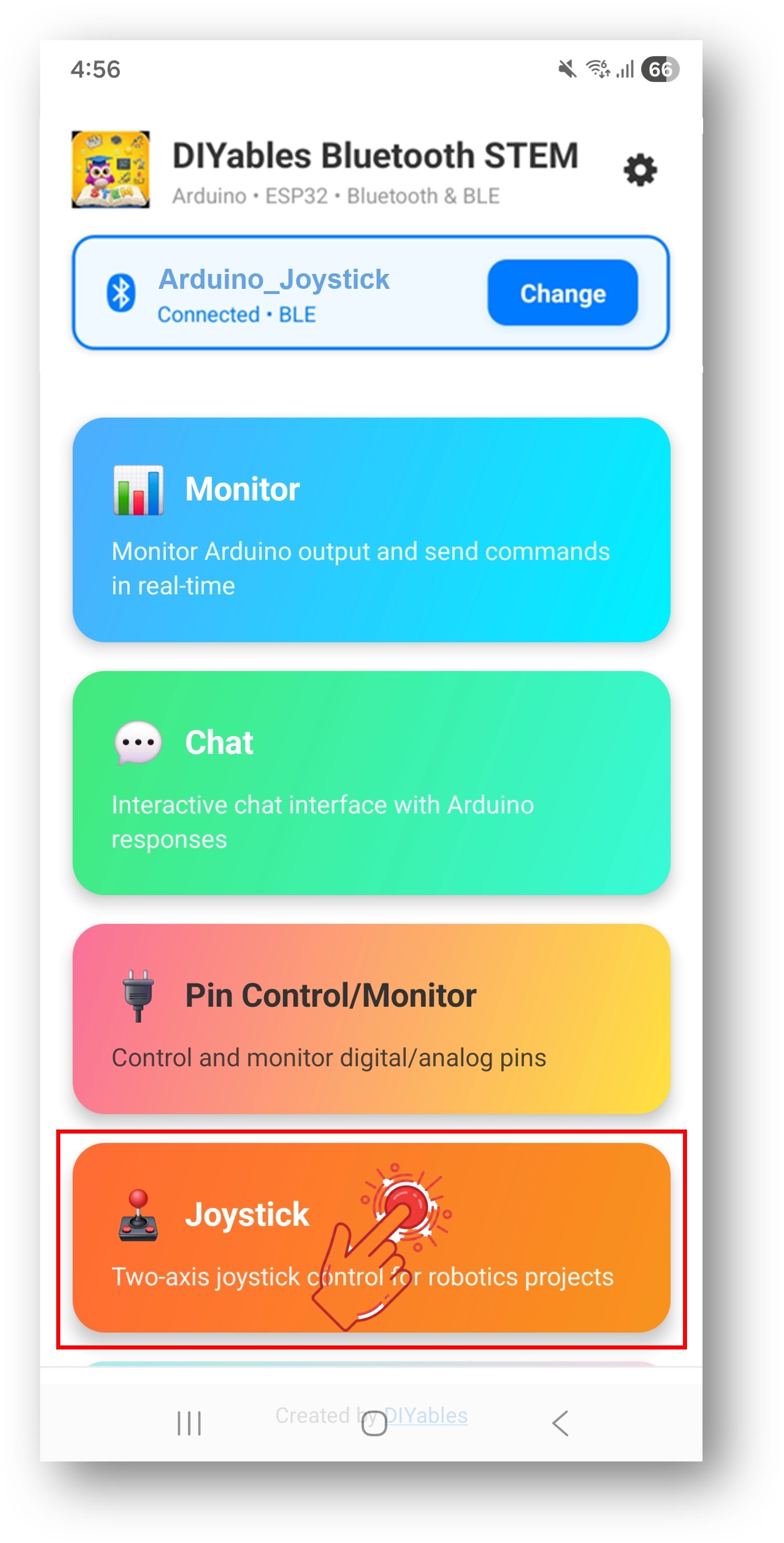
Remarque : Vous pouvez appuyer sur l'icône de paramètres sur l'écran d'accueil pour cacher/afficher les applications sur l'écran d'accueil. Pour plus de détails, consultez le Manuel Utilisateur de l'Application DIYables Bluetooth.
- Faites glisser le joystick dans n'importe quelle direction
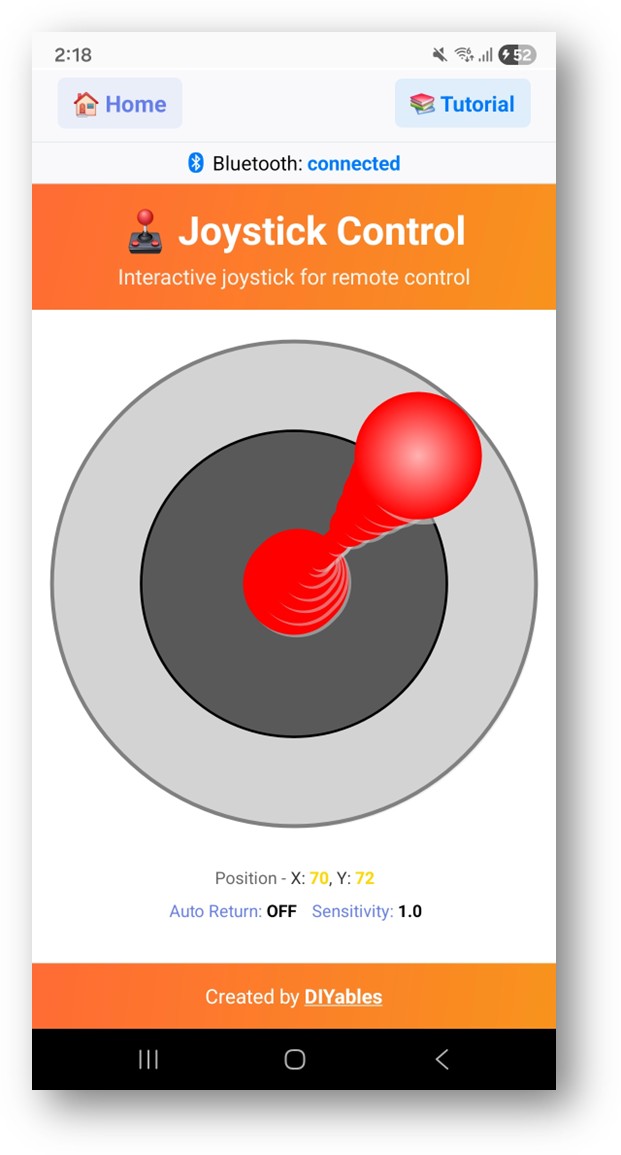
Maintenant regardez le Moniteur Série dans l'IDE Arduino. Vous verrez :
Personnalisation Créative - Adaptez le Code à Votre Projet
Gérer les Valeurs du Joystick
Configurer les Paramètres du Joystick
Gérer la Demande de Configuration
Exemples de Programmation
Robot à Conduite Différentielle
Servo Pan-Tilt
Direction avec Zone Morte
Dépannage
Problèmes Courants
1. Impossible de trouver l'appareil dans l'application
- Assurez-vous que l'Arduino UNO R4 WiFi est alimenté et le sketch téléversé
- Vérifiez que le Bluetooth de votre téléphone est activé
- Sur Android 11 et antérieur, activez aussi les services de localisation
2. Le joystick ne répond pas
- Vérifiez le statut de connexion Bluetooth dans l'application
- Vérifiez que le callback onJoystickValue est configuré correctement
- Vérifiez le Moniteur Série pour les messages de connexion
3. Le mouvement semble lent
- Réduisez la valeur de sensibilité pour des mises à jour plus fréquentes
- Assurez-vous que bluetoothServer.loop() est appelé sans longs délais
4. Les valeurs sautent ou sont incohérentes
- Ajoutez un filtre de zone morte pour les petits mouvements
- Vérifiez le paramètre de sensibilité
5. La connexion se coupe fréquemment
- Rapprochez-vous de l'Arduino (réduire la distance)
- Assurez-vous d'une alimentation USB stable
6. Le téléversement échoue ou la carte n'est pas reconnue
- Installez la dernière version du package de carte Arduino UNO R4 via le Gestionnaire de Cartes
- Essayez un autre câble USB ou port
Idées de Projets
- Contrôleur de robot sans fil
- Support pan-tilt pour caméra
- Contrôle 2-axes de bras robotique
- Contrôleur de position pour matrice LED
- Contrôleur de jeu pour jeux Arduino
Prochaines Étapes
Après avoir maîtrisé l'exemple Bluetooth Joystick, essayez :
- Bluetooth Slider - Pour le contrôle de valeur linéaire
- Bluetooth Rotator - Pour le contrôle angulaire
- Bluetooth Monitor - Pour le retour de statut
- Applications Bluetooth Multiples - Combiner joystick avec d'autres contrôles
Support
Pour une aide supplémentaire :
- Consultez la documentation de référence API
- Visitez tutoriels DIYables
- Forums de la communauté Arduino