Arduino Nano ESP32 Web Rotator avec la Bibliothèque DIYables ESP32 WebApps
Aperçu
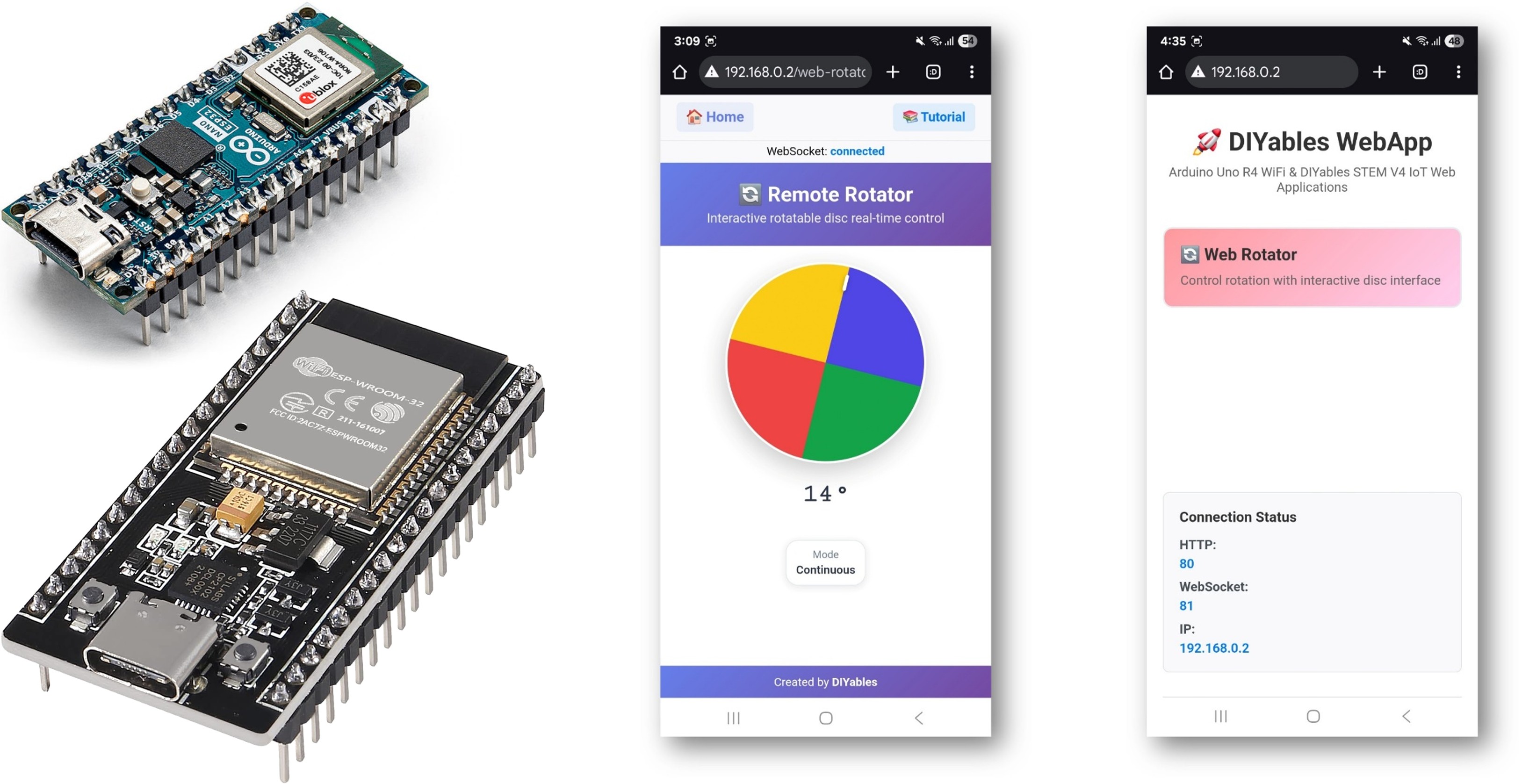
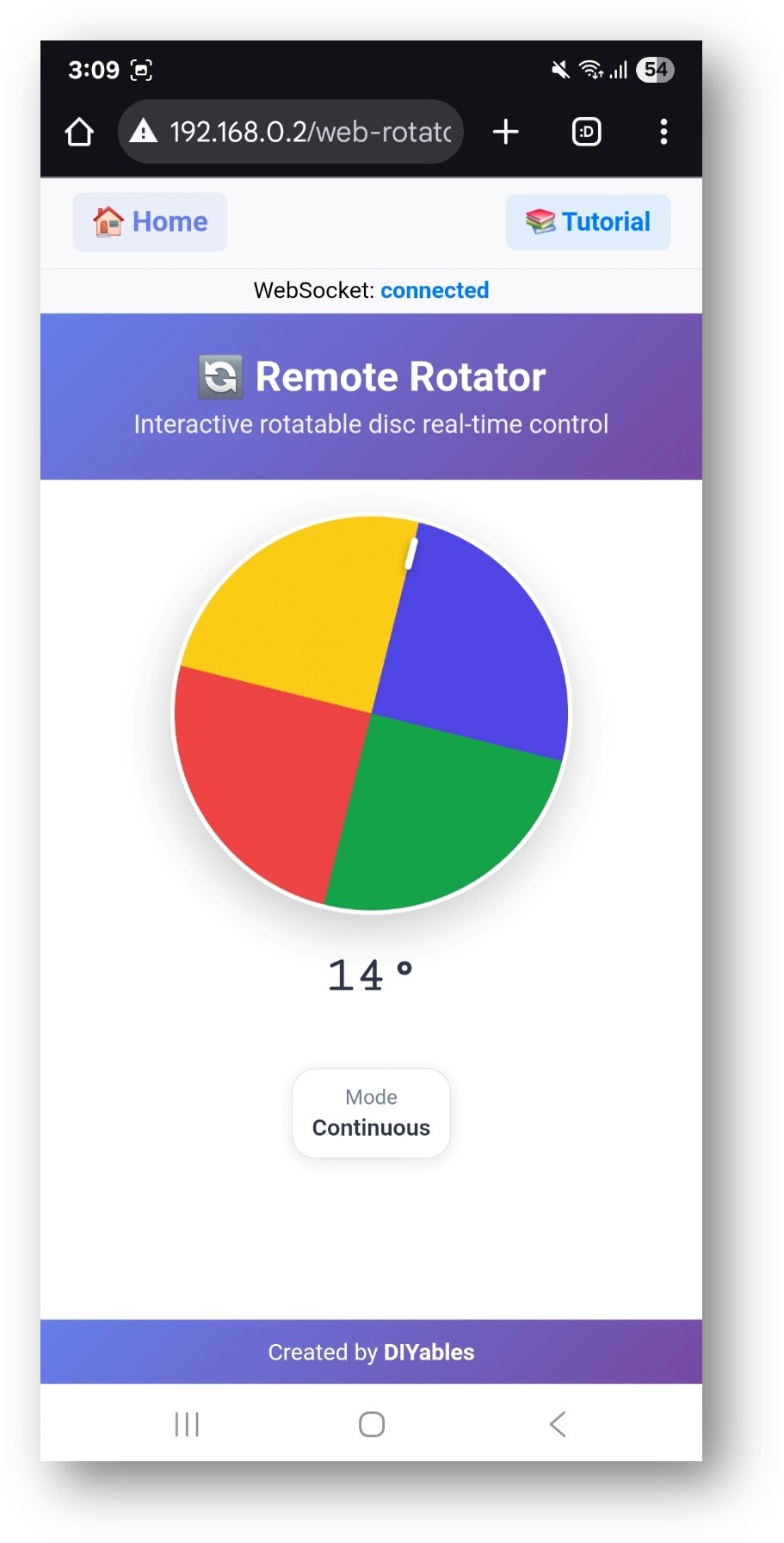
Ce tutoriel couvre la classe DIYablesWebRotatorPage de la bibliothèque DIYables ESP32 WebApps. La page du navigateur affiche un disque déplaçable qui rapporte son angle actuel à l'Arduino Nano ESP32 via WebSocket. Le disque fonctionne soit en mode continu (0–360°), soit en mode à plage limitée. La configuration est définie dans le constructeur et envoyée automatiquement au navigateur lors de la connexion.
Regardez ce tutoriel vidéo étape par étape montrant comment utiliser un servomoteur avec l'application Web Rotator :
Ce que ce Tutoriel Couvre
- Sélectionner entre les modes de rotation continu et à plage limitée
- Recevoir les valeurs d'angle dans un callback du sketch
- Piloter un servomoteur depuis l'angle rapporté
- Fournir l'angle actuel aux navigateurs nouvellement connectés
Matériel Requis
Ou vous pouvez acheter les kits suivants:
| 1 | × | Kit de Capteurs DIYables (18 capteurs/écrans) |
Note d'achat: Si vous utilisez plusieurs servomoteurs, nous recommandons d'utiliser le PCA9685 16 Channel PWM Servo Driver Module pour économiser les broches du MCU et faciliter le câblage.
Étapes
Suivez ces instructions étape par étape :
- Si c'est la première fois que vous utilisez l'Arduino Nano ESP32, consultez le tutoriel sur Installation du logiciel Arduino Nano ESP32..
- Connectez la carte Arduino Nano ESP32 à votre ordinateur avec un câble USB.
- Lancez l'IDE Arduino sur votre ordinateur.
- Sélectionnez la carte appropriée (ex. Arduino Nano ESP32) et le port COM.
- Naviguez vers l'icône Bibliothèques dans la barre gauche de l'IDE Arduino.
- Cherchez "DIYables ESP32 WebApps", puis trouvez la bibliothèque DIYables ESP32 WebApps de DIYables
- Cliquez sur le bouton Installer pour installer la bibliothèque.
- Search for DIYables ESP32 WebApps created by DIYables and click the Install button.
- On vous demandera d'installer d'autres dépendances de bibliothèques
- Cliquez sur le bouton Installer tout pour installer toutes les dépendances de bibliothèques.
- Dans l'IDE Arduino, allez dans Fichier Exemples DIYables ESP32 WebApps WebRotator, ou copiez le code ci-dessus et collez-le dans l'éditeur de l'IDE Arduino
- Mettez à jour les identifiants WiFi dans le sketch :
- Cliquez sur le bouton Téléverser dans l'IDE Arduino pour téléverser le code sur l'Arduino Nano ESP32
- Ouvrez le Moniteur Série
- La sortie du Moniteur Série devrait ressembler à ceci :
- Si rien n'apparaît, appuyez sur le bouton de réinitialisation de la carte.
- Entrez l'adresse IP du Moniteur Série dans un navigateur sur le même réseau.
- Exemple : http://192.168.0.2
- La page d'accueil affiche une carte pour l'application de rotateur :
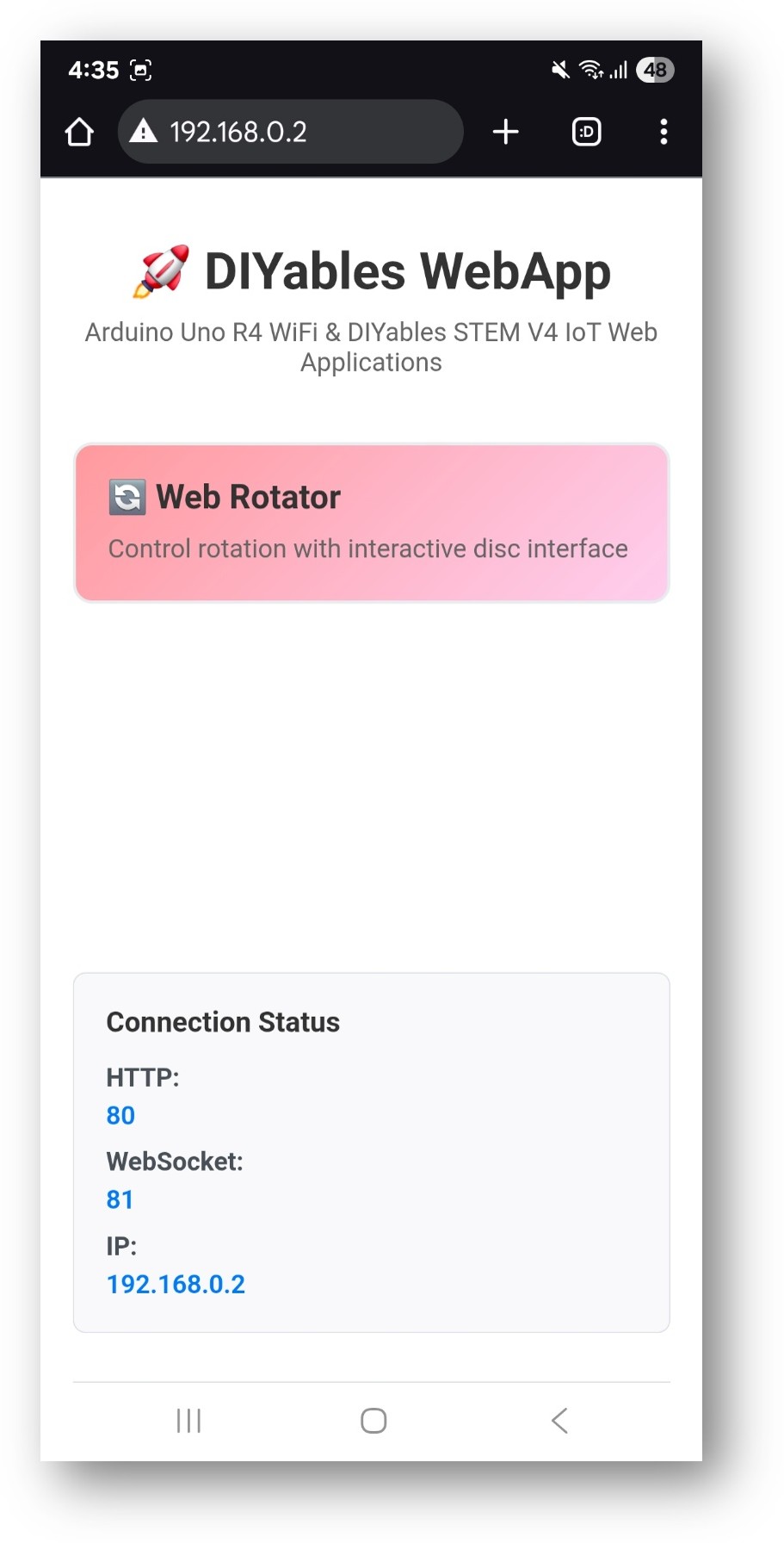
- Sélectionnez la carte Web Rotator pour ouvrir la page de contrôle du disque :
- La page est également directement accessible à http://192.168.0.2/web-rotator.
- Faites glisser le disque et observez l'angle rapporté dans le Moniteur Série.
Modes de Rotation
Mode Continu (360° complet)
Mode à Plage Limitée
Callbacks
Réception des Mises à Jour d'Angle
Appelé chaque fois que l'utilisateur fait tourner le disque :
Fourniture de l'Angle au Navigateur
Appelé quand un navigateur se connecte et demande l'angle actuel :
Exemple de Servomoteur
Mappez l'angle du navigateur (0–180°) à un servo standard :
Dépannage
L'angle du disque ne déclenche pas le callback
- Confirmez que onRotatorValueFromWeb est enregistré avant webAppsServer.begin()
- Vérifiez que le statut WebSocket dans le navigateur indique "connecté"
Le servo se déplace à la mauvaise position
- Vérifiez que la plage d'angles correspond à la plage physique du servo (typiquement 0–180°)
- Utilisez le mode à plage limitée quand la plage mécanique est inférieure à 360°
Page inaccessible
- Vérifiez l'adresse IP du Moniteur Série
- Assurez-vous que la carte et l'appareil du navigateur sont sur le même réseau WiFi 2,4 GHz