Arduino Nano ESP32 - Potentiomètre Moteur Servo
Ce tutoriel vous explique comment utiliser l'Arduino Nano ESP32 pour contrôler l'angle d'un moteur servo en fonction de la valeur entrée par un potentiomètre. En détail, nous allons apprendre :
- Comment connecter le potentiomètre et le moteur servo à Arduino Nano ESP32
- Comment programmer Arduino Nano ESP32 pour lire la valeur d'un potentiomètre et contrôler un moteur servo en conséquence.
Préparation du matériel
Ou vous pouvez acheter les kits suivants:
| 1 | × | Kit de Capteurs DIYables (18 capteurs/écrans) |
Note d'achat: Si vous utilisez plusieurs servomoteurs, nous recommandons d'utiliser le PCA9685 16 Channel PWM Servo Driver Module pour économiser les broches du MCU et faciliter le câblage.
À propos du servomoteur et du potentiomètre
Si vous n'êtes pas familier avec les moteurs servo et les potentiomètres, y compris le brochage, le fonctionnement et la programmation, les tutoriels suivants vous seront utiles :
Diagramme de câblage
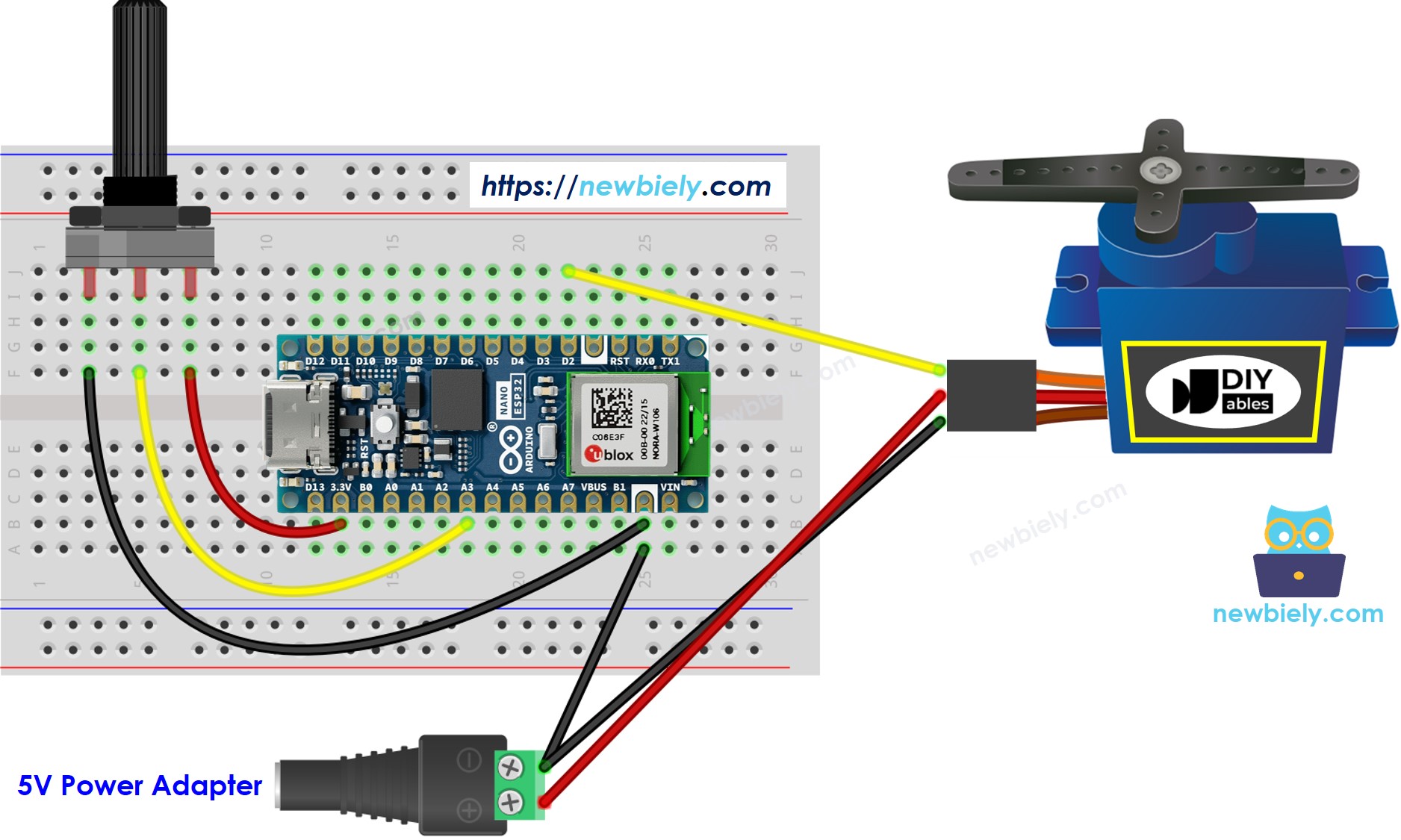
Cette image a été créée avec Fritzing. Cliquez pour agrandir l'image.
Comment programmer
- Lisez la valeur du potentiomètre (allant de 0 à 1023)
- Convertissez-le en un angle compris entre 0 et 180 degrés.
- Contrôlez le servo à l'angle spécifié.
Code Arduino Nano ESP32
Étapes rapides
- Si vous êtes nouveau avec l'Arduino Nano ESP32, consultez le tutoriel sur Installation du logiciel Arduino Nano ESP32..
- Câblez les composants comme indiqué dans le schéma.
- Connectez la carte Arduino Nano ESP32 à votre ordinateur à l'aide d'un câble USB.
- Ouvrez l'Arduino IDE sur votre ordinateur.
- Choisissez la bonne carte Arduino Nano ESP32, telle que (par exemple NodeMCU 1.0 (Module ESP-12E)), et son port COM respectif.
- Connectez votre Arduino Nano ESP32 à votre ordinateur à l'aide d'un câble USB.
- Lancez l'Arduino IDE, sélectionnez la carte et le port appropriés.
- Copiez le code ci-dessus et ouvrez-le dans l'Arduino IDE.
- Cliquez sur le bouton Upload dans l'Arduino IDE pour transférer le code à l'Arduino Nano ESP32.

- Ouvrez le moniteur série
- Tournez le potentiomètre
- Vérifiez la rotation du moteur servo
- Consultez le résultat dans le moniteur série
Explication du code
Découvrez l'explication ligne par ligne contenue dans les commentaires du code source !