Raspberry Pi Pico - servomoteur
Ce guide vous montre comment faire fonctionner un servomoteur avec un Raspberry Pi Pico. Nous allons couvrir :
- Programmer le Raspberry Pi Pico pour faire fonctionner un servomoteur
- Utiliser le Raspberry Pi Pico pour ajuster la vitesse d'un servomoteur
- Fournir une alimentation externe aux servomoteurs
Préparation du matériel
| 1 | × | Raspberry Pi Pico W | |
| 1 | × | Raspberry Pi Pico Alternativement: | |
| 1 | × | Câble Micro USB | |
| 1 | × | Servo-moteur | |
| 1 | × | Fils de connexion | |
| 1 | × | Recommandé: Carte d'extension à bornier à vis pour Raspberry Pi Pico |
Ou vous pouvez acheter les kits suivants:
| 1 | × | Kit de Capteurs DIYables (18 capteurs/écrans) |
Note d'achat: Si vous utilisez plusieurs servomoteurs, nous recommandons d'utiliser le PCA9685 16 Channel PWM Servo Driver Module pour économiser les broches du MCU et faciliter le câblage.
À propos du servomoteur
Un servomoteur est une pièce qui peut faire tourner son arbre, généralement de 0 à 180 degrés. Il est utilisé pour ajuster la position d'un objet.
Schéma des broches
Cet exemple montre comment utiliser un servomoteur qui possède trois broches :
- Broche VCC : Branchez le fil rouge sur VCC (5 volts).
- Broche GND : Branchez le fil noir ou brun sur GND (0 volts).
- Broche de signal : Branchez le fil jaune ou orange pour obtenir le signal de commande PWM à partir d'une broche du Raspberry Pi Pico.
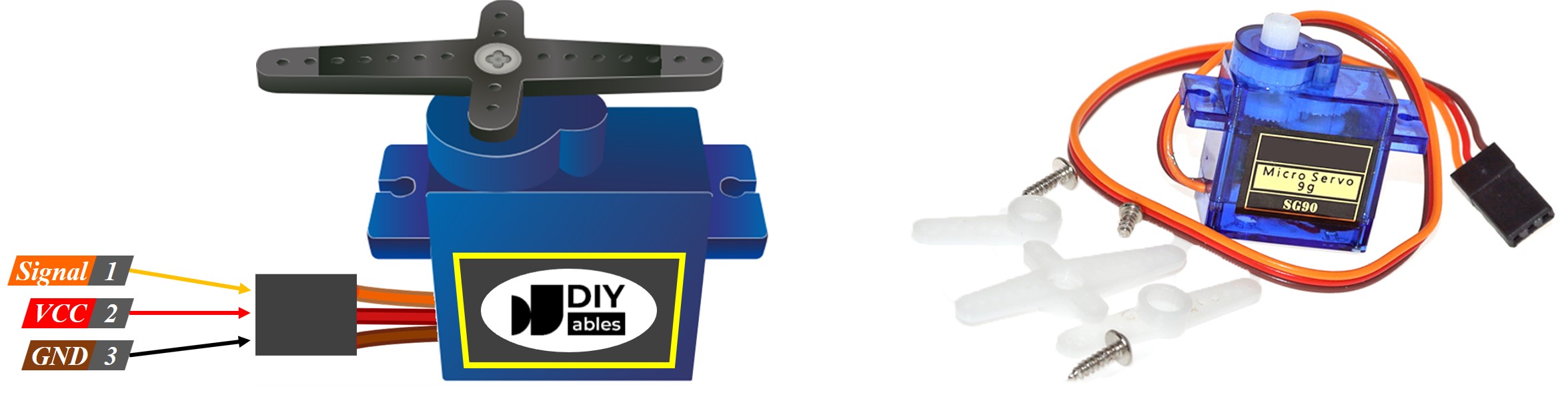
Diagramme de câblage
Des schémas en ligne pourraient montrer une connexion entre la broche VCC d'un servomoteur et la broche VBUS de la carte Raspberry Pi Pico. Évitez de le faire car cela peut endommager la carte Raspberry Pi Pico.
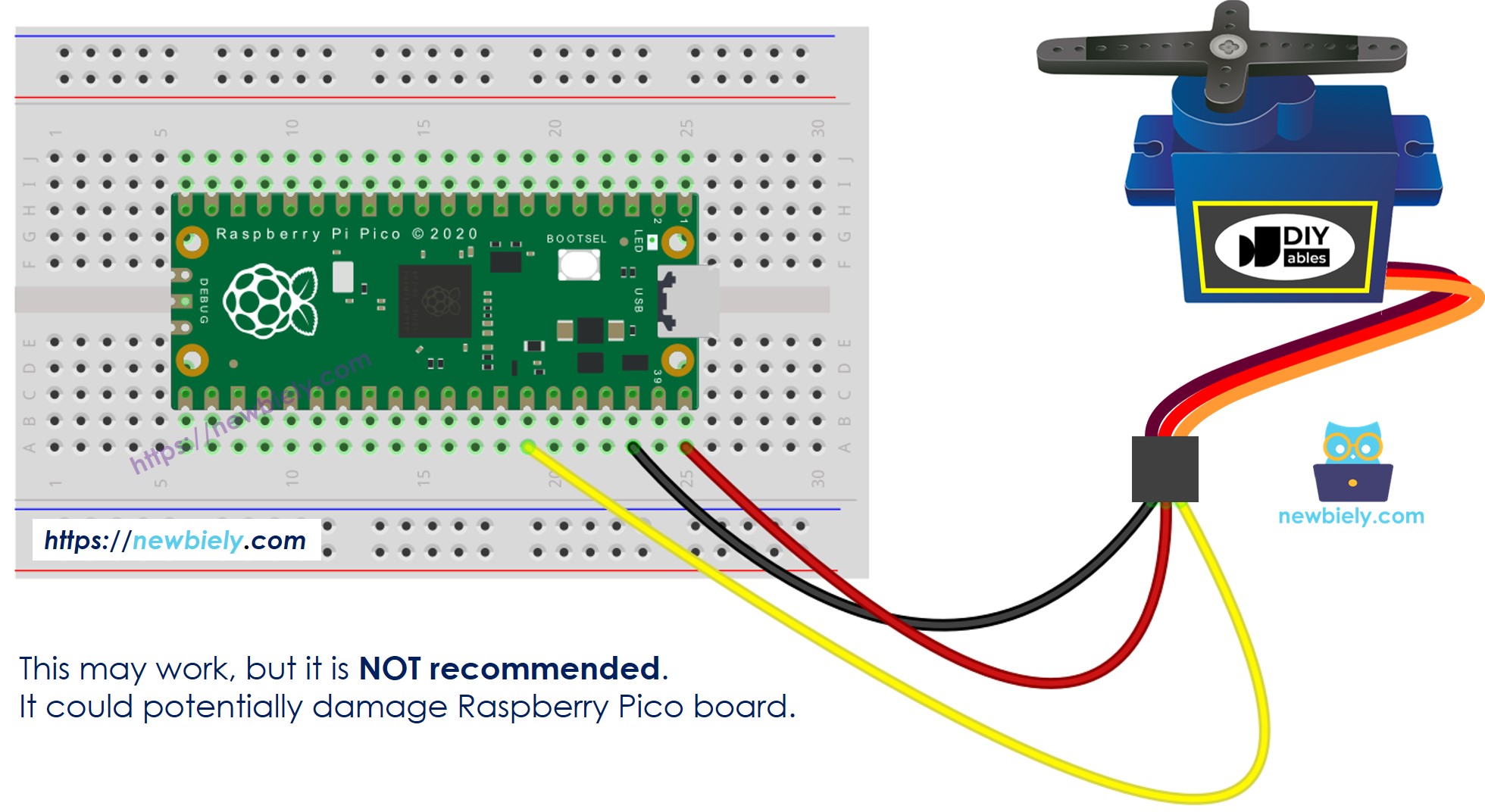
Cette image a été créée avec Fritzing. Cliquez pour agrandir l'image.
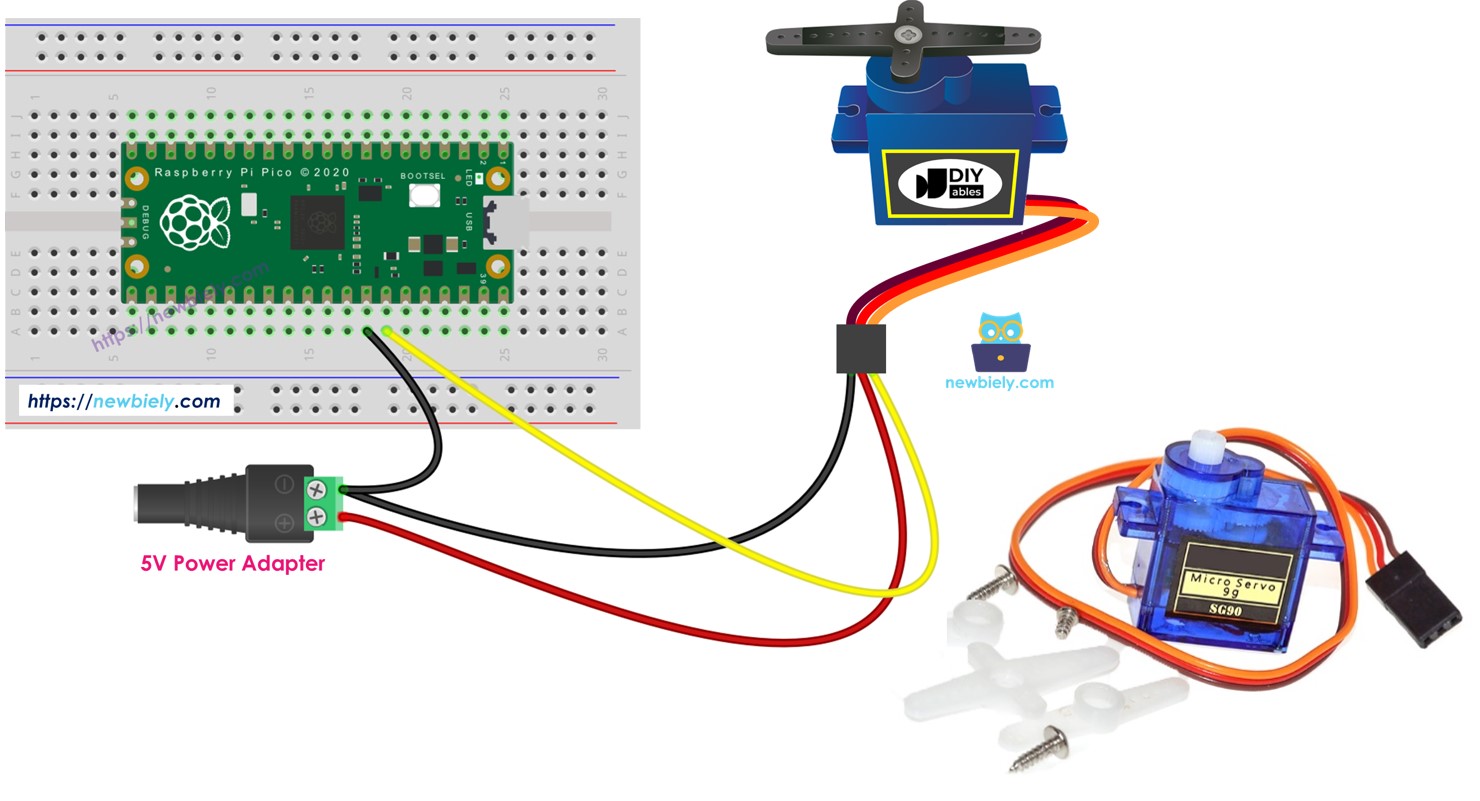
Pour assurer la sécurité de votre Raspberry Pi Pico, utilisez une alimentation séparée pour le servomoteur. Le schéma ci-dessous explique comment connecter le servomoteur à cette source d'alimentation.
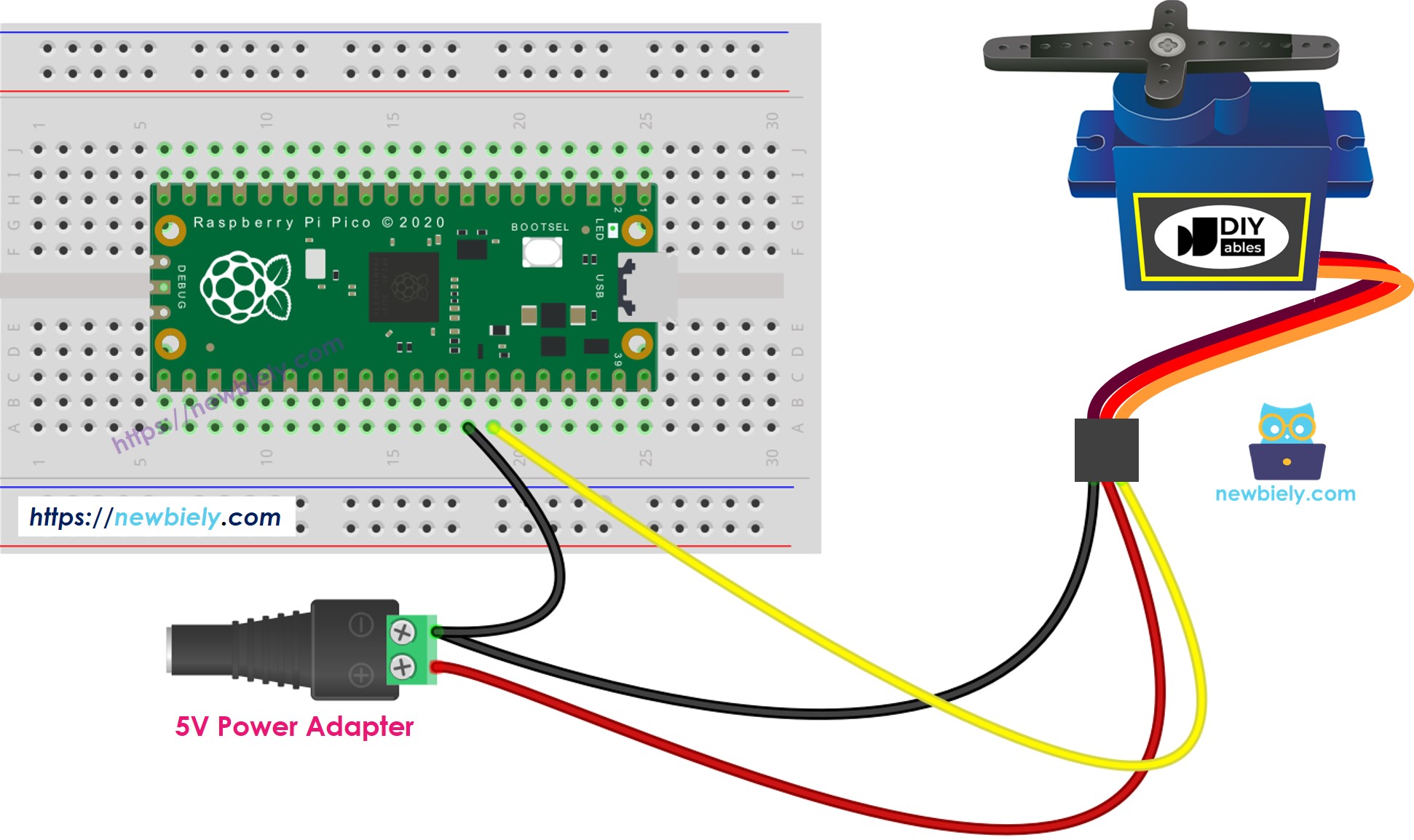
Cette image a été créée avec Fritzing. Cliquez pour agrandir l'image.
Assurez-vous de connecter la masse (GND) de l'alimentation externe à la masse de la carte Raspberry Pi Pico. Cela est crucial pour son bon fonctionnement.
Code du Raspberry Pi Pico
Étapes rapides
Veuillez suivre ces instructions étape par étape :
- Assurez-vous que l’IDE Thonny est installé sur votre ordinateur.
- Assurez-vous que le firmware MicroPython est installé sur votre Raspberry Pi Pico.
- Si c’est la première fois que vous utilisez un Raspberry Pi Pico, reportez-vous au tutoriel Raspberry Pi Pico - Premiers pas. pour des instructions détaillées.
- Connectez le Raspberry Pi Pico au servomoteur selon le schéma fourni.
- Connectez le Raspberry Pi Pico à votre ordinateur avec un câble USB.
- Lancez l’IDE Thonny sur votre ordinateur.
- Dans l’IDE Thonny, sélectionnez l’interpréteur MicroPython (Raspberry Pi Pico) en naviguant vers Outils Options.
- Dans l’onglet Interpréteur, sélectionnez MicroPython (Raspberry Pi Pico) dans le menu déroulant.
- Assurez-vous que le port correct est sélectionné. L’IDE Thonny détectera automatiquement le port, mais vous devrez peut-être le sélectionner manuellement (par exemple COM3 sur Windows ou /dev/ttyACM0 sur Linux).
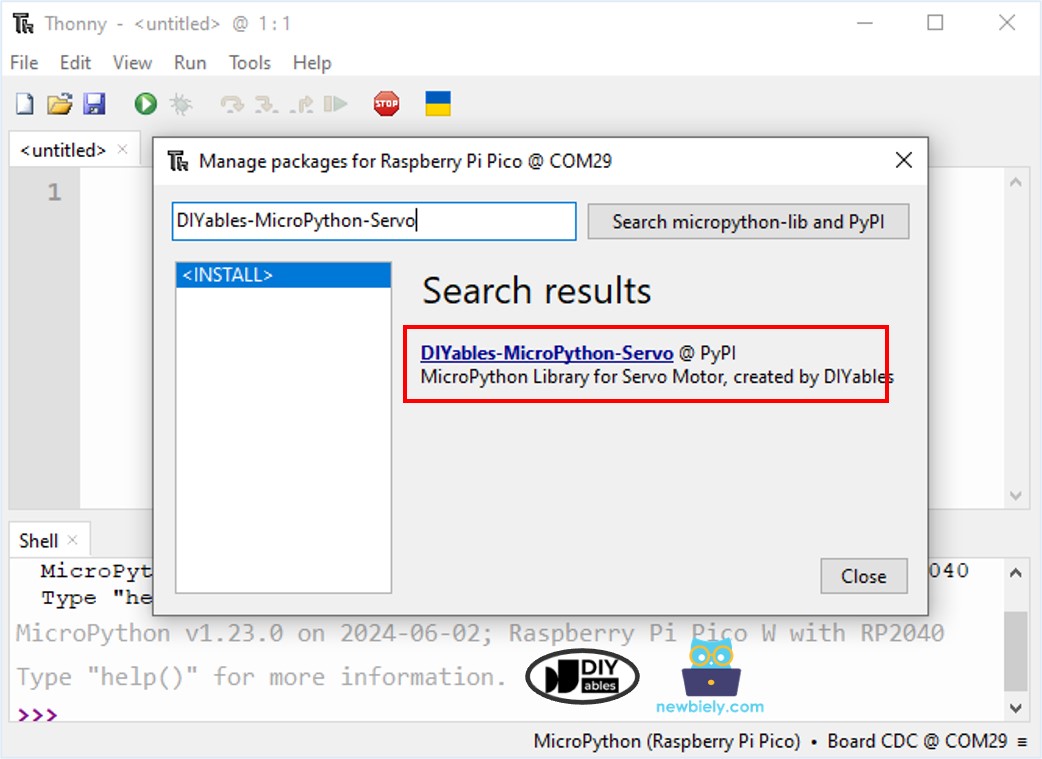
- Accédez à Outils Gérer les paquets dans l’IDE Thonny.
- Recherchez “DIYables-MicroPython-Servo”, puis trouvez la bibliothèque Servo Motor créée par DIYables.
- Cliquez sur DIYables-MicroPython-Servo, puis cliquez sur le bouton Install pour installer la bibliothèque Servo Motor.
- Copiez le code ci-dessus et collez-le dans l'éditeur de l'IDE Thonny.
- Enregistrez le script sur votre Raspberry Pi Pico en :
- Cliquez sur le bouton Enregistrer, ou utilisez les touches Ctrl+S.
- Dans la boîte de dialogue Enregistrer, vous verrez deux sections : Cet ordinateur et Raspberry Pi Pico. Sélectionnez Raspberry Pi Pico.
- Enregistrez le fichier sous main.py
- Cliquez sur le bouton vert Run (ou appuyez sur F5) pour exécuter le script. Le script s'exécutera.
- Observez l'action : le servomoteur tourne progressivement de 0 à 180 degrés, puis tourne progressivement de 180 à 0 degrés.
Si vous nommez votre script main.py et que vous le sauvegardez dans le répertoire racine du Raspberry Pi Pico, il s'exécutera automatiquement à chaque mise sous tension ou réinitialisation du Pico. Cela est utile pour les applications autonomes qui doivent démarrer immédiatement lors de la mise sous tension. Si vous nommez votre script sous un autre nom que main.py, vous devrez l'exécuter manuellement depuis le Shell de Thonnys.
Explication du code
Vous pouvez trouver l'explication dans la section des commentaires du code Raspberry Pi Pico ci-dessus.
Comment contrôler la vitesse du servomoteur
Le script MicroPython ci-dessous contrôle un servo sur le Raspberry Pi Pico pour effectuer une transition en douceur entre les angles sans bloquer l'exécution. Il utilise utime pour la temporisation et met à jour la position du servo périodiquement sans interrompre le programme. Cette approche permet à la boucle principale de rester réactive à d'autres opérations.