Raspberry Pi Pico - Interrupteur de fin de course
Ce guide vous montre comment utiliser un interrupteur de fin de course avec le Raspberry Pi Pico. Nous aborderons les détails suivants :
- Comment brancher le capteur de fin de course au Raspberry Pi Pico.
- Comment écrire du code pour le Raspberry Pi Pico afin de lire l'état du capteur de fin de course.
- Comment programmer le Raspberry Pi Pico pour détecter les états activé et désactivé du capteur de fin de course.
Préparation du matériel
Ou vous pouvez acheter les kits suivants:
| 1 | × | Kit de Capteurs DIYables (18 capteurs/écrans) |
À propos de l'interrupteur de fin de course
On l'appelle Limit Switch car sa fonction principale est de détecter quand un objet en mouvement atteint son extrémité. Il est aussi connu sous le nom d'un interrupteur de déplacement. Il est aussi appelé l'interrupteur de déplacement.
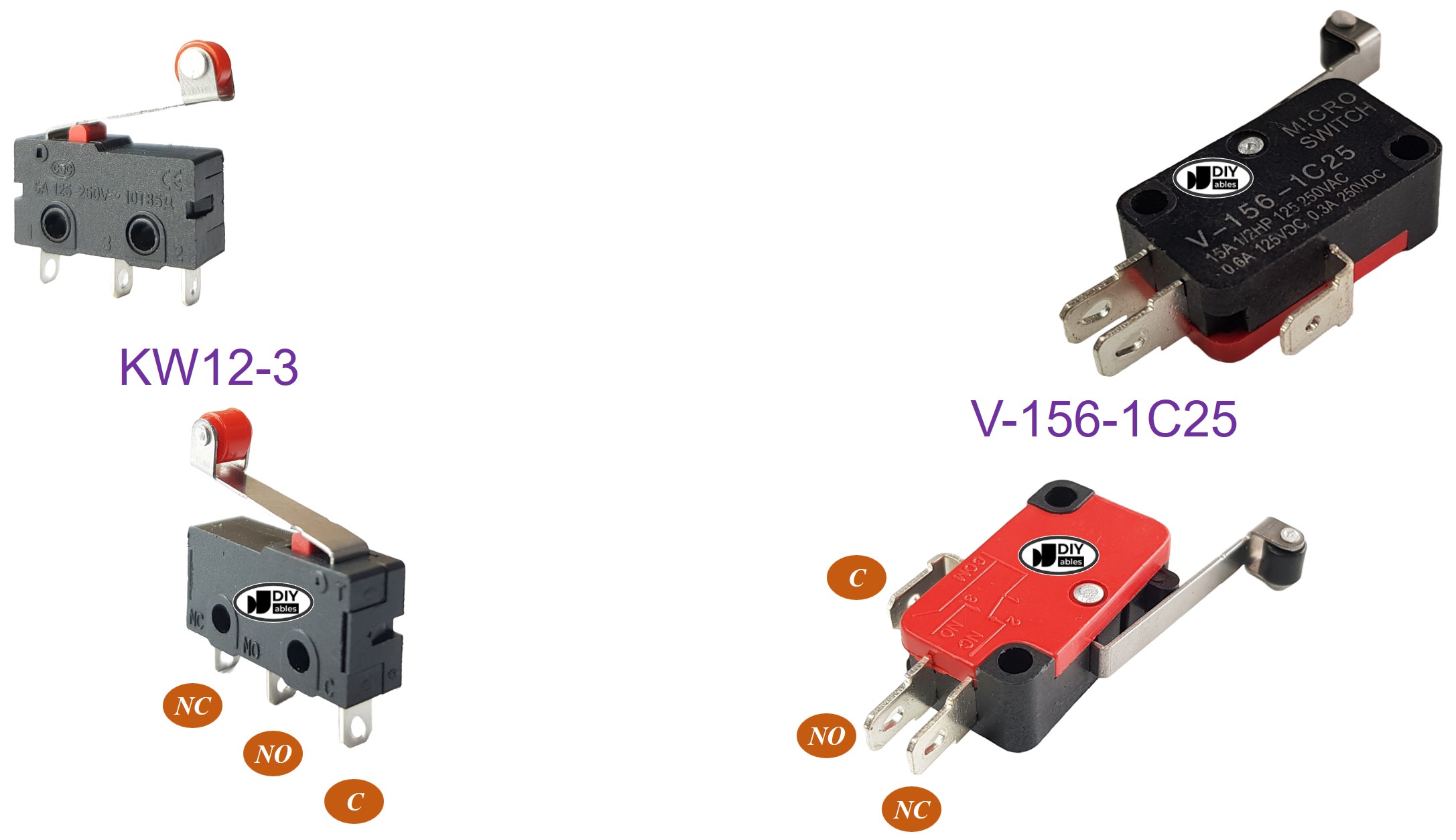
Schéma des broches
Différents types d'interrupteurs de fin de course sont couramment utilisés, tels que le KW12-3 et le V-156-1C25. Chaque modèle comprend 3 broches.
- Broche C : Il s'agit de la broche commune. Elle est utilisée aussi bien dans les configurations ouvertes que fermées.
- Broche NO : Cela signifie la broche normalement ouverte. Elle est utilisée lorsque le réglage est ouvert.
- Broche NC : Cela signifie la broche normalement fermée. Elle est utilisée lorsque le réglage est fermé.
Comment cela fonctionne
L'interrupteur de fin de course possède trois broches, mais généralement seules deux broches sont utilisées : la broche C et l'une des deux autres broches. Il existe quatre façons de connecter l'interrupteur de fin de course. Voici un tableau montrant le câblage de l'interrupteur de fin de course et ses lectures sur le Raspberry Pi Pico pour les quatre méthodes :
| C pin | NO pin | NC pin | Raspberry Pi Pico Input Pin's State | |
|---|---|---|---|---|
| 1 | GND | Raspberry Pi Pico Input Pin (with pull-up) | NOT connected | HIGH when untouched, LOW when touched |
| 2 | GND | NOT connected | Raspberry Pi Pico Input Pin (with pull-up) | LOW when untouched, HIGH when touched |
| 3 | VCC | Raspberry Pi Pico Input Pin (with pull-down) | NOT connected | LOW when untouched, HIGH when touched |
| 4 | VCC | NOT connected | Raspberry Pi Pico Input Pin (with pull-down) | HIGH when untouched, LOW when touched |
Nous pouvons changer les positions de la broche GND et de la broche d'entrée sur le Raspberry Pi Pico pour chaque méthode. Cela nous donne 8 méthodes différentes pour connecter le Raspberry Pi Pico à un interrupteur de fin de course.
Nous n'avons besoin que de choisir l'une des quatre méthodes mentionnées plus tôt. Pour ce tutoriel, nous utiliserons la première méthode.
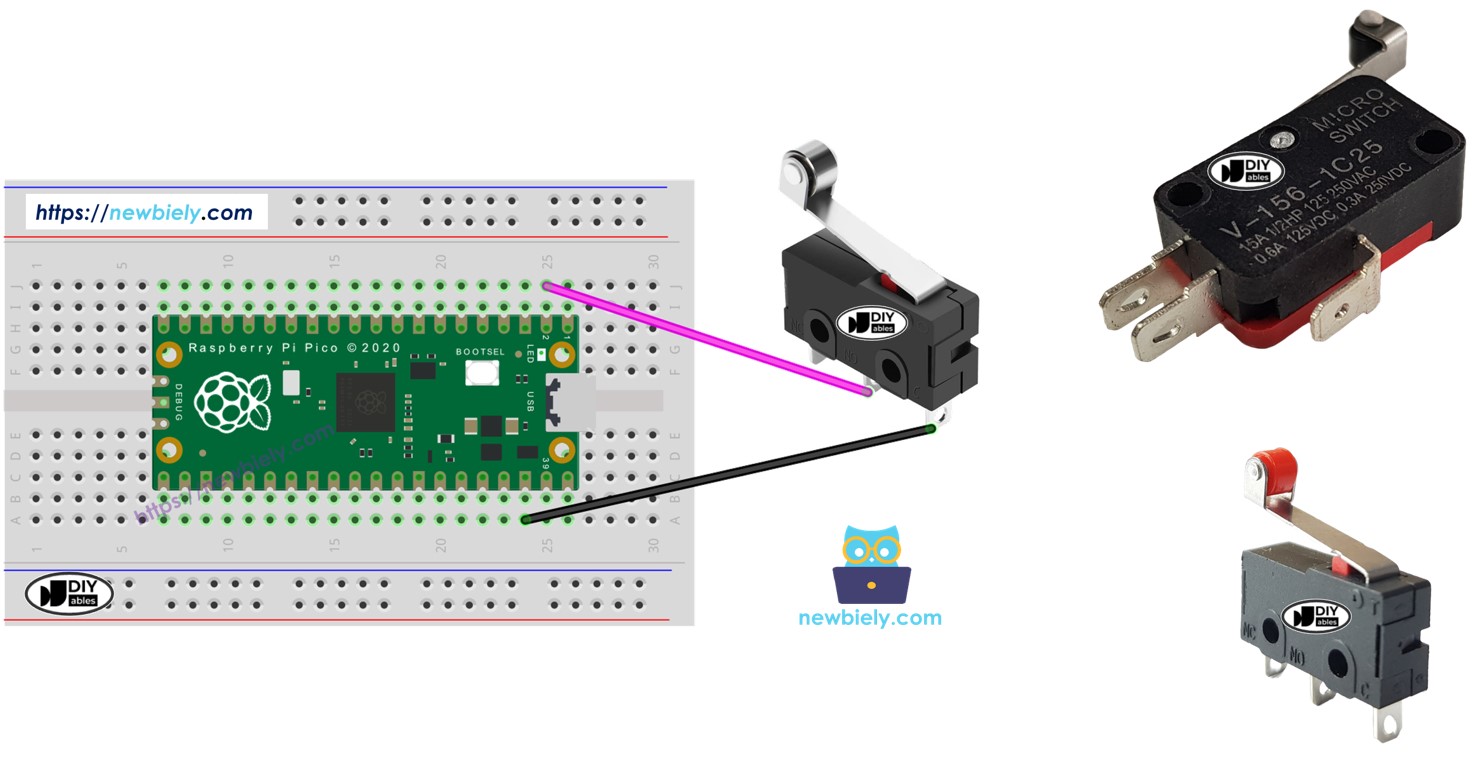
Diagramme de câblage
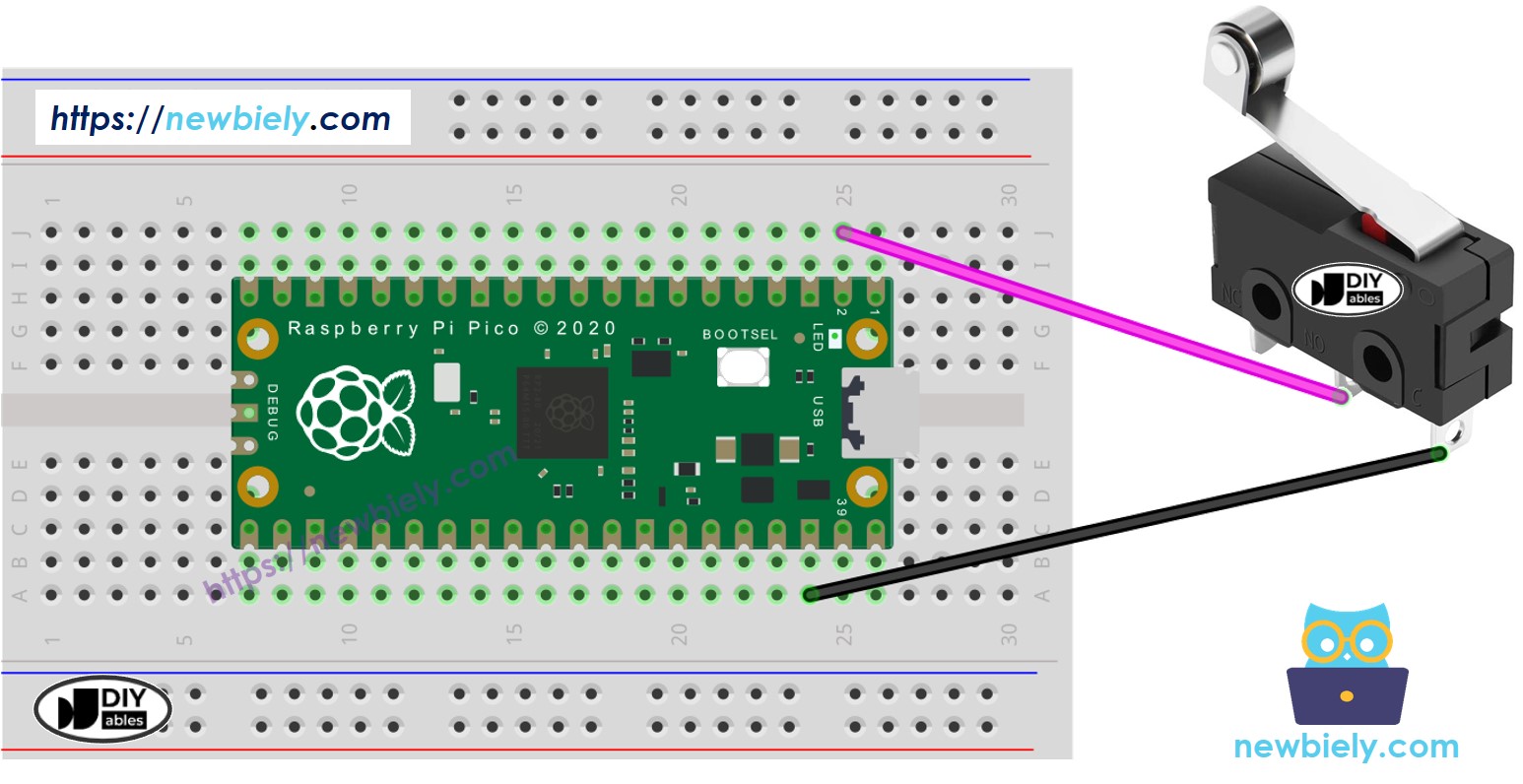
Cette image a été créée avec Fritzing. Cliquez pour agrandir l'image.
Code pour Raspberry Pi Pico - Interrupteur de fin de course
Un interrupteur de fin de course, semblable à un bouton, nécessite un anti-rebond pour fonctionner correctement. L'anti-rebond peut rendre le code plus complexe. Heureusement, la DIYables_MicroPython_Button library offre une fonction d'anti-rebond et comprend une résistance de tirage interne, ce qui simplifie le processus de programmation.
Voici deux situations habituelles :
- Le premier : Si l'interrupteur est touché, faites quelque chose. S'il n'est pas touché, faites l'inverse.
- Le deuxième : Si l'interrupteur passe de non touché à touché ou de touché à non touché, faites quelque chose.
Voyons comment écrire le script MicroPython dans les deux cas.
Code pour Raspberry Pi Pico - Lire l'état de l'interrupteur de fin de course
Étapes rapides
Veuillez suivre ces instructions étape par étape :
- Assurez-vous que l'IDE Thonny est installé sur votre ordinateur.
- Assurez-vous que le firmware MicroPython est installé sur votre Raspberry Pi Pico.
- Si c'est la première fois que vous utilisez un Raspberry Pico, reportez-vous au tutoriel Raspberry Pi Pico - Premiers pas. pour des instructions détaillées.
- Connectez le Raspberry Pi Pico à l'interrupteur de fin de course selon le diagramme fourni.
- Connectez le Raspberry Pi Pico à votre ordinateur à l'aide d'un câble USB.
- Lancez l'IDE Thonny sur votre ordinateur.
- Dans l'IDE Thonny, sélectionnez l'interpréteur MicroPython (Raspberry Pi Pico) en vous rendant dans Outils Options.
- Dans l'onglet Interpréteur, sélectionnez MicroPython (Raspberry Pi Pico) dans le menu déroulant.
- Assurez-vous que le port correct est sélectionné. L'IDE Thonny devrait détecter automatiquement le port, mais vous devrez peut-être le sélectionner manuellement (par exemple, COM3 sous Windows ou /dev/ttyACM0 sous Linux).
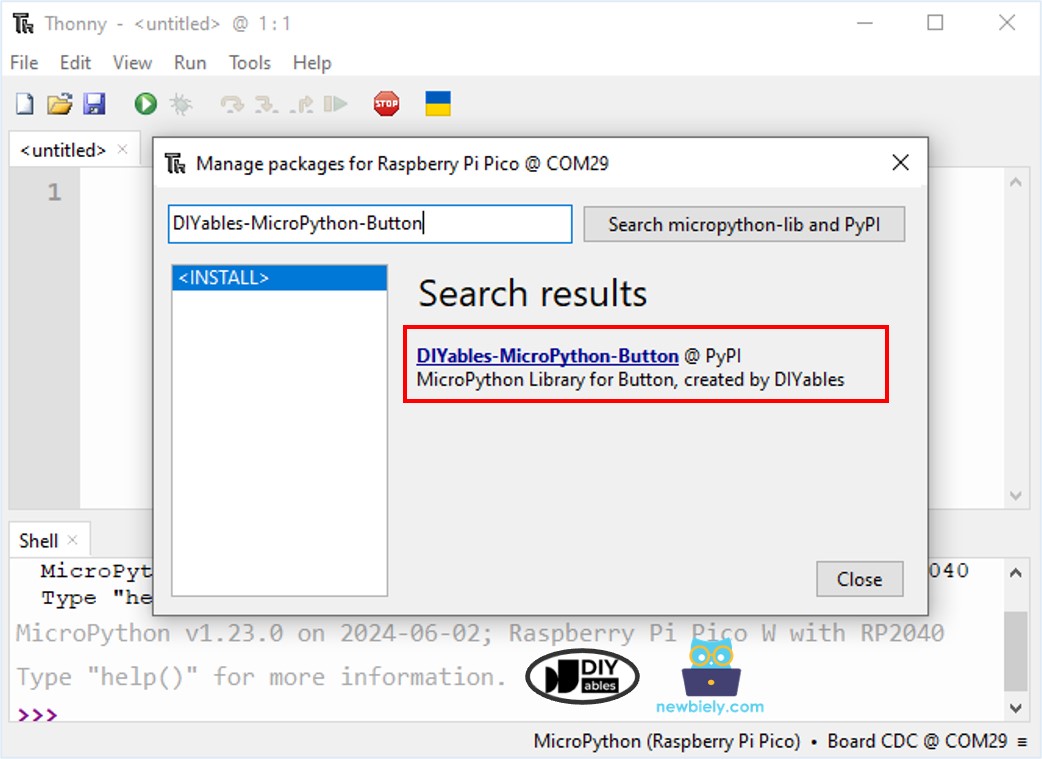
- Dans l'IDE Thonny, accédez à Outils Gérer les packages dans l'IDE Thonny.
- Recherchez “DIYables-MicroPython-Button”, puis trouvez la bibliothèque Button créée par DIYables.
- Cliquez sur DIYables-MicroPython-Button, puis cliquez sur le bouton Install pour installer la bibliothèque Button.
- Copiez le code ci-dessus et collez-le dans l'éditeur de l'IDE Thonny.
- Enregistrez le script sur votre Raspberry Pi Pico en:
- Cliquez sur le bouton Enregistrer, ou utilisez les touches Ctrl+S.
- Dans la boîte de dialogue d'enregistrement, vous verrez deux sections : Cet ordinateur et Raspberry Pi Pico. Sélectionnez Raspberry Pi Pico.
- Enregistrez le fichier sous main.py
- Cliquez sur le bouton vert Run (ou appuyez sur F5) pour exécuter le script. Le script s'exécutera.
- Appuyez, maintenez, puis relâchez l'interrupteur de fin de course tout en vérifiant le message dans le Shell en bas de Thonny.
Si vous nommez votre script main.py et que vous le sauvegardez dans le répertoire racine du Raspberry Pi Pico, il se lancera automatiquement à chaque mise sous tension ou réinitialisation du Pico. Cela est utile pour les applications autonomes qui doivent démarrer immédiatement lors de la mise sous tension. Si vous nommez votre script avec un autre nom que main.py, vous devrez l’exécuter manuellement depuis la Shell de Thonnys.
Code Raspberry Pi Pico - Vérifier l'événement touché/non touché de l'interrupteur de fin de course
- Copiez le code ci-dessus et collez-le dans l'éditeur de l'IDE Thonny.
- Enregistrez le script sur votre Raspberry Pi Pico.
- Cliquez sur le bouton vert Exécuter (ou appuyez sur F5) pour exécuter le script. Le script s'exécutera.
- Appuyez, maintenez, puis relâchez l'interrupteur de fin de course tout en vérifiant le message dans le Shell en bas de Thonny.