Raspberry Pi Pico - capteur de force
Ce guide vous montre comment utiliser un capteur de force avec un Raspberry Pi Pico. Nous allons apprendre :
- Comment fonctionne un capteur de force
- Comment connecter le capteur de force au Raspberry Pi Pico
- Comment écrire un script MicroPython pour le Raspberry Pi Pico afin de lire les données du capteur de force
Préparation du matériel
Ou vous pouvez acheter les kits suivants:
| 1 | × | Kit de Capteurs DIYables (18 capteurs/écrans) |
À propos du capteur de force

Le capteur de force, également connu sous le nom de résistance sensible à la force (force sensing resistor) ou tout simplement FSR, voit sa résistance changer lorsque la pression est appliquée.
- À faible coût et facile à utiliser.
- Bon pour détecter la pression physique ou la compression.
- Pas adapté pour mesurer le poids en livres.
Le capteur de force se trouve dans la batterie électronique, les téléphones mobiles, les consoles de jeux portables et divers autres petits dispositifs électroniques.
Schéma de brochage
Un capteur de force est livré avec deux broches. Comme il agit comme une résistance, il n'est pas nécessaire de distinguer ces broches. Elles sont identiques.
Comment cela fonctionne
Le capteur de force fonctionne comme une résistance qui ajuste sa résistance en fonction de la force exercée. Si vous appuyez plus fort, la résistance entre les deux extrémités diminue.
Diagramme de câblage
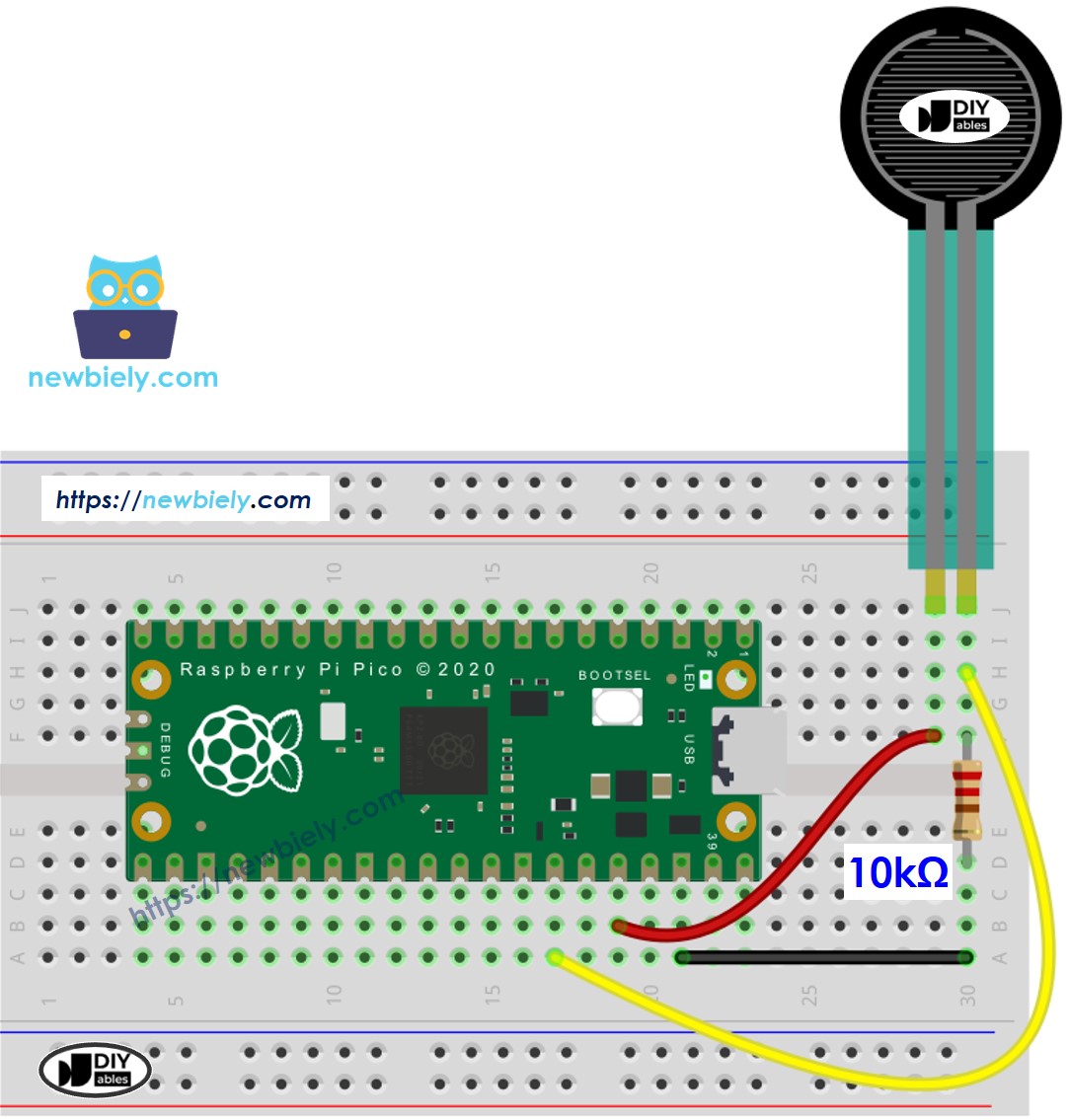
Cette image a été créée avec Fritzing. Cliquez pour agrandir l'image.
Code du Raspberry Pi Pico
Étapes rapides
Veuillez suivre ces instructions étape par étape :
- Assurez-vous que l'IDE Thonny est installé sur votre ordinateur.
- Assurez-vous que le firmware MicroPython est installé sur votre Raspberry Pi Pico.
- Si c'est la première fois que vous utilisez un Raspberry Pico, reportez-vous au tutoriel Raspberry Pi Pico - Premiers pas. pour obtenir des instructions détaillées.
- Connectez le capteur de force au Raspberry Pi Pico selon le schéma fourni.
- Connectez le Raspberry Pi Pico à votre ordinateur à l'aide d'un câble USB.
- Lancez l'IDE Thonny sur votre ordinateur.
- Dans l'IDE Thonny, sélectionnez l'interpréteur MicroPython (Raspberry Pi Pico) en vous rendant dans Outils Options.
- Dans l'onglet Interpréteur, sélectionnez MicroPython (Raspberry Pi Pico) dans le menu déroulant.
- Assurez-vous que le bon port est sélectionné. L'IDE Thonny devrait détecter automatiquement le port, mais vous devrez peut-être le sélectionner manuellement (par exemple COM3 sur Windows ou /dev/ttyACM0 sur Linux).
- Copiez le code ci-dessus et collez-le dans l'éditeur de l'IDE Thonny.
- Enregistrez le script sur votre Raspberry Pi Pico en:
- Cliquez sur le bouton Enregistrer, ou utilisez Ctrl+S.
- Dans la boîte de dialogue d'enregistrement, vous verrez deux sections : Cet ordinateur et Raspberry Pi Pico. Sélectionnez Raspberry Pi Pico
- Enregistrez le fichier sous main.py
- Cliquez sur le bouton vert Exécuter (ou appuyez sur F5) pour exécuter le script. Le script s'exécutera.
- Appuyez sur le capteur de force.
- Consultez le message dans le Shell en bas de Thonny.
Veuillez noter que la valeur fournie par le capteur peut varier. Il est recommandé de calibrer pour chaque niveau de force.
Si vous nommez votre script main.py et que vous le sauvegardez dans le répertoire racine du Raspberry Pi Pico, il s'exécutera automatiquement à chaque fois que le Pico est alimenté ou réinitialisé. Ceci est utile pour les applications autonomes qui doivent démarrer immédiatement après l'alimentation. Si vous nommez votre script sous un autre nom que main.py, vous devrez l'exécuter manuellement depuis le Shell de Thonnys.