Raspberry Pi Pico - Capteur d'évitement d'obstacles
Dans ce guide, nous apprendrons à utiliser le Raspberry Pi Pico et le capteur d'évitement d'obstacles infrarouge pour détecter des obstacles.
Préparation du matériel
Ou vous pouvez acheter les kits suivants:
| 1 | × | Kit de Capteurs DIYables (18 capteurs/écrans) |
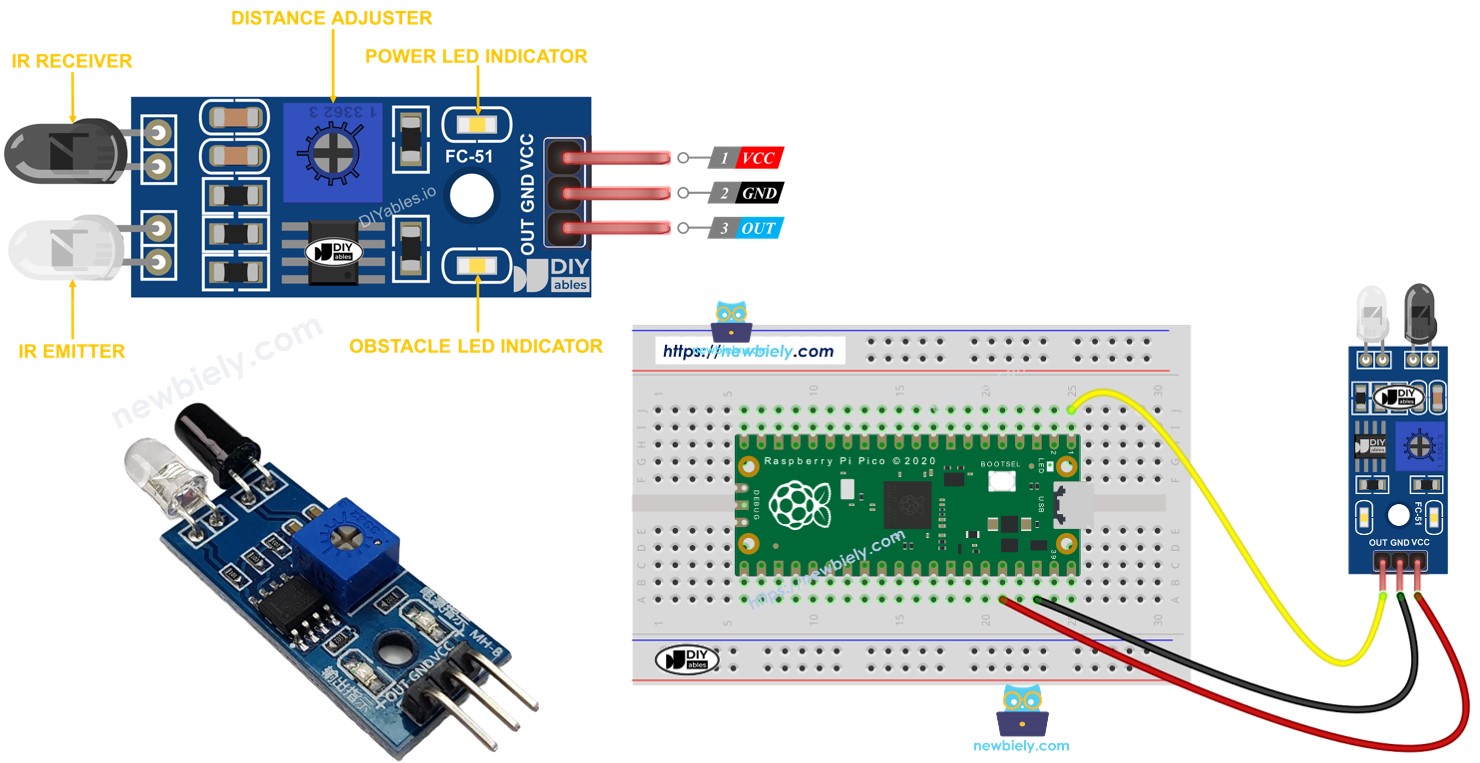
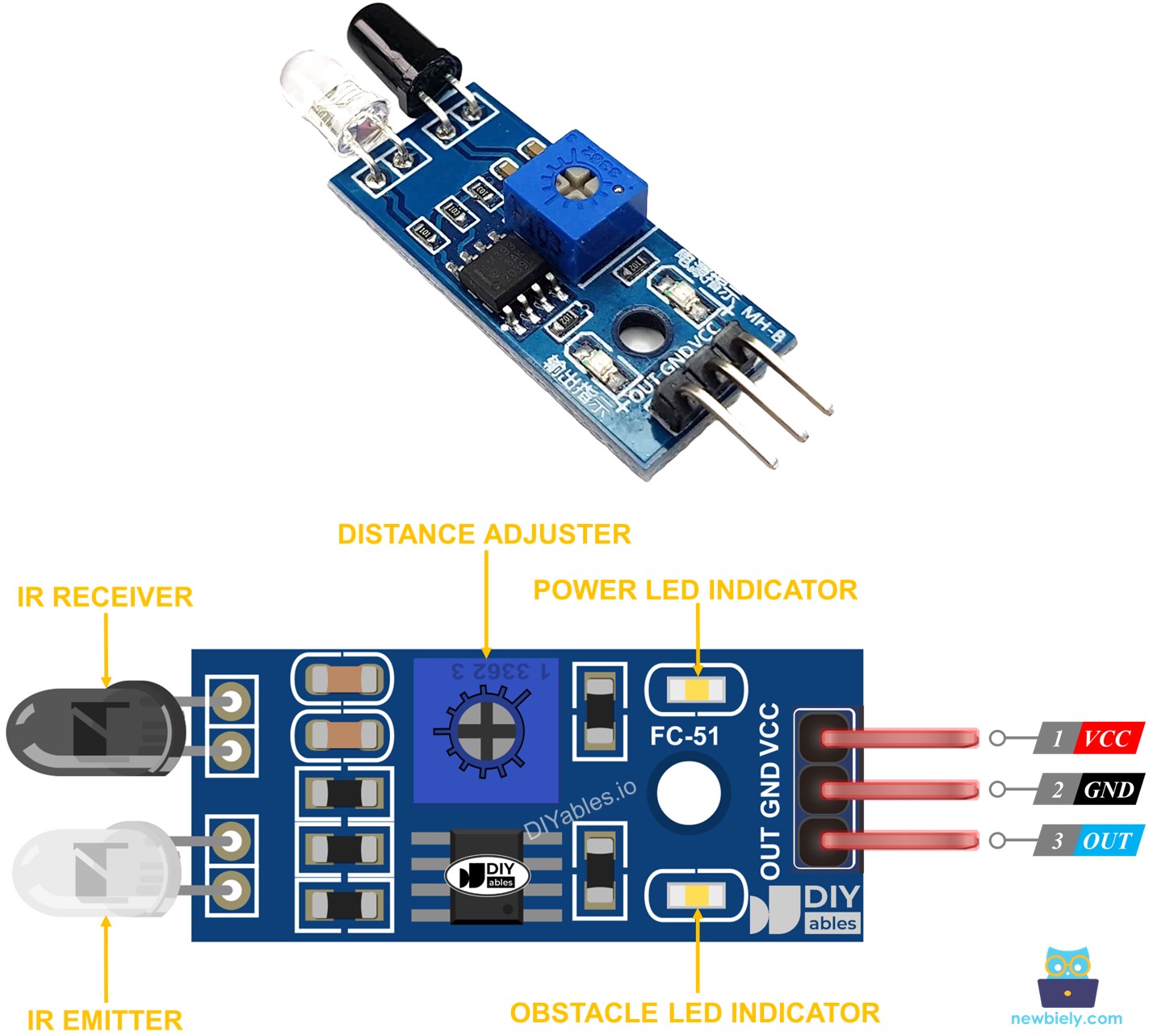
À propos du capteur d’évitement d’obstacles IR
Le capteur d'obstacles infrarouge (IR) utilise un signal infrarouge pour détecter les obstacles devant lui. Il peut détecter des objets situés entre 2 cm et 30 cm. Vous pouvez régler la plage de détection à l'aide d'un outil inclus dans le capteur, appelé potentiomètre.
Brochage
Le capteur d'évitement d'obstacles IR est livré avec trois broches :
- Broche GND : Connectez cette broche à la masse (0 volt).
- Broche VCC : Connectez cette broche au VCC (5 volts ou 3,3 volts).
- Broche OUT : Il s'agit d'une broche de sortie. Elle est basse lorsqu'il y a un obstacle et haute lorsqu'il n'y a pas d'obstacle. Connectez cette broche à l'entrée du Raspberry Pi Pico.
Comment ça fonctionne
Un module capteur d'obstacles infrarouge possède un émetteur IR et un récepteur IR. L'émetteur IR émet un signal IR. Le récepteur IR capte ce signal lorsqu'il se réfléchit sur un objet, afin de déterminer s'il y a un obstacle. La présence d'un obstacle est indiquée par la broche OUT.
- Lorsqu'un obstacle bloque le capteur, sa broche OUT devient BAS.
- Lorsqu'aucun obstacle ne se trouve devant le capteur, la broche OUT est HAUTE.
※ Note:
Lors du transport, le capteur peut se plier, ce qui peut l’empêcher de fonctionner correctement. Si le capteur ne fonctionne pas correctement, alignez l’émetteur et le récepteur infrarouges de manière à ce qu’ils soient parallèles l’un à l’autre.
Diagramme de câblage
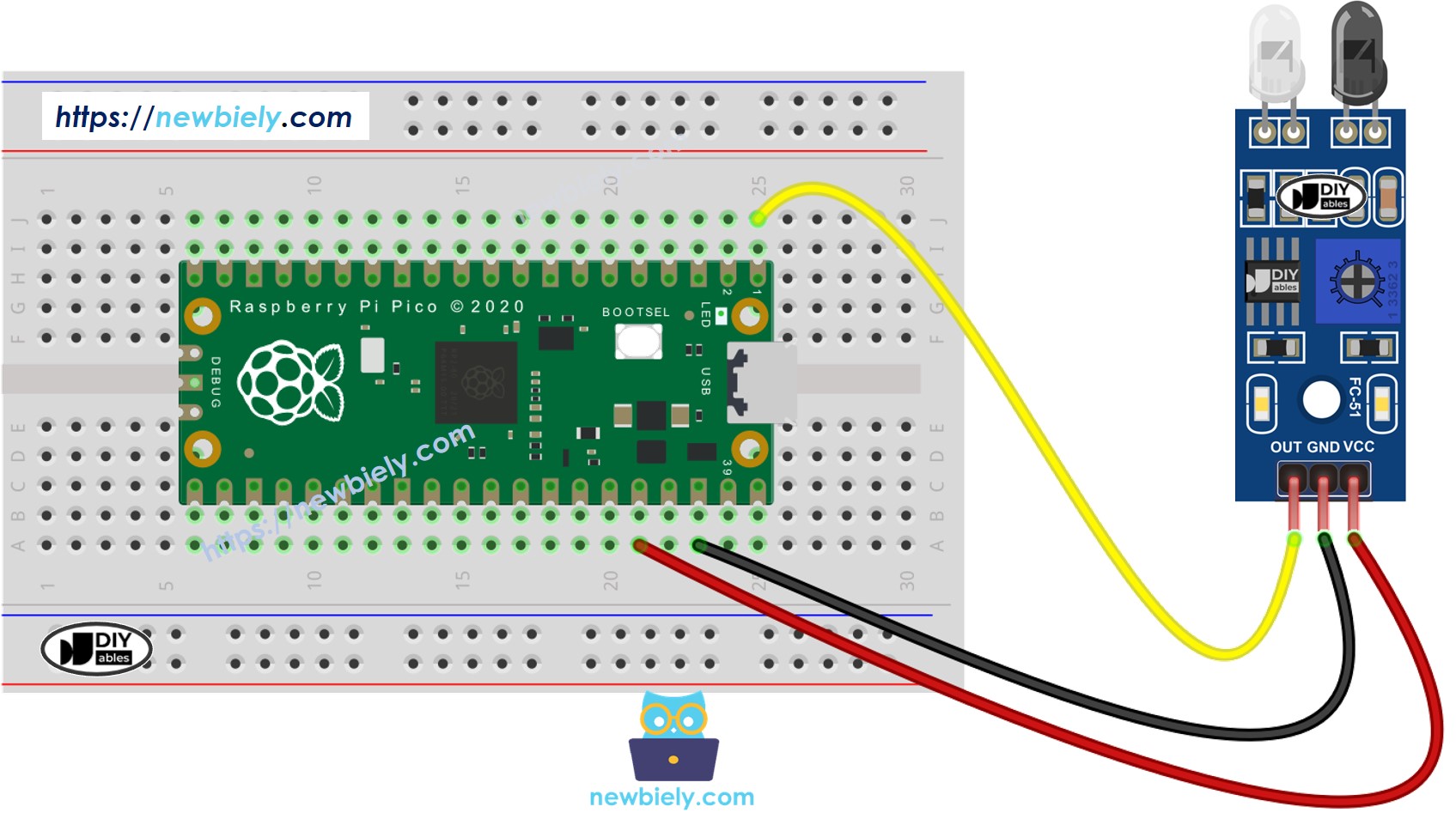
Cette image a été créée avec Fritzing. Cliquez pour agrandir l'image.
Code du Raspberry Pi Pico
Voici des exemples de la façon d'utiliser le capteur d'obstacles :
- Agir ou attendre, en fonction de la présence d'une barrière.
- Agir ou attendre, lorsque vous remarquez une barrière ou lorsqu'elle disparaît.
Code du Raspberry Pi Pico pour vérifier la présence d'un obstacle
Étapes rapides
Veuillez suivre ces instructions étape par étape :
- Assurez-vous que l'IDE Thonny est installé sur votre ordinateur.
- Assurez-vous que le firmware MicroPython est installé sur votre Raspberry Pi Pico.
- Si c'est votre première utilisation d'un Raspberry Pico, consultez le tutoriel Raspberry Pi Pico - Premiers pas. pour des instructions détaillées.
- Branchez le capteur d'évitement d'obstacles sur le Raspberry Pi Pico selon le schéma fourni.
- Connectez le Raspberry Pi Pico à votre ordinateur à l'aide d'un câble USB.
- Lancez l'IDE Thonny sur votre ordinateur.
- Dans l'IDE Thonny, sélectionnez l'interpréteur MicroPython (Raspberry Pi Pico) en accédant à Outils Options.
- Dans l'onglet Interpréteur, sélectionnez MicroPython (Raspberry Pi Pico) dans le menu déroulant.
- Assurez-vous que le bon port est sélectionné. L'IDE Thonny devrait détecter automatiquement le port, mais vous devrez peut-être le sélectionner manuellement (par exemple, COM3 sur Windows ou /dev/ttyACM0 sur Linux).
- Copiez le code ci-dessus et collez-le dans l'éditeur de l'IDE Thonny.
- Enregistrez le script sur votre Raspberry Pi Pico en :
- Cliquez sur le bouton Enregistrer, ou utilisez les touches Ctrl+S.
- Dans la boîte de dialogue d'enregistrement, vous verrez deux sections : Cet ordinateur et Raspberry Pi Pico. Sélectionnez Raspberry Pi Pico.
- Enregistrez le fichier sous le nom main.py.
- Cliquez sur le bouton vert Exécuter (ou appuyez sur F5) pour lancer le script. Le script s'exécutera.
- Placez un obstacle devant le capteur pendant un moment, puis retirez-le.
- Consultez le message dans le Shell situé en bas de Thonny.
Code Raspberry Pi Pico pour la détection d'un obstacle
Étapes rapides
- Copiez le code MicroPython fourni et collez-le dans l'éditeur de Thonny.
- Enregistrez le code sur votre Raspberry Pi Pico.
- Cliquez sur le bouton vert Exécuter (ou appuyez sur F5) pour exécuter le script.
- Placez brièvement quelque chose devant le capteur, puis retirez-le.
- Consultez le message dans la Shell en bas de Thonny.