Raspberry Pi Pico - joystick - servomoteur
Ce guide vous montrera comment contrôler deux servomoteurs ou un kit pan-tilt à l'aide d'un Raspberry Pi Pico et d'un joystick.
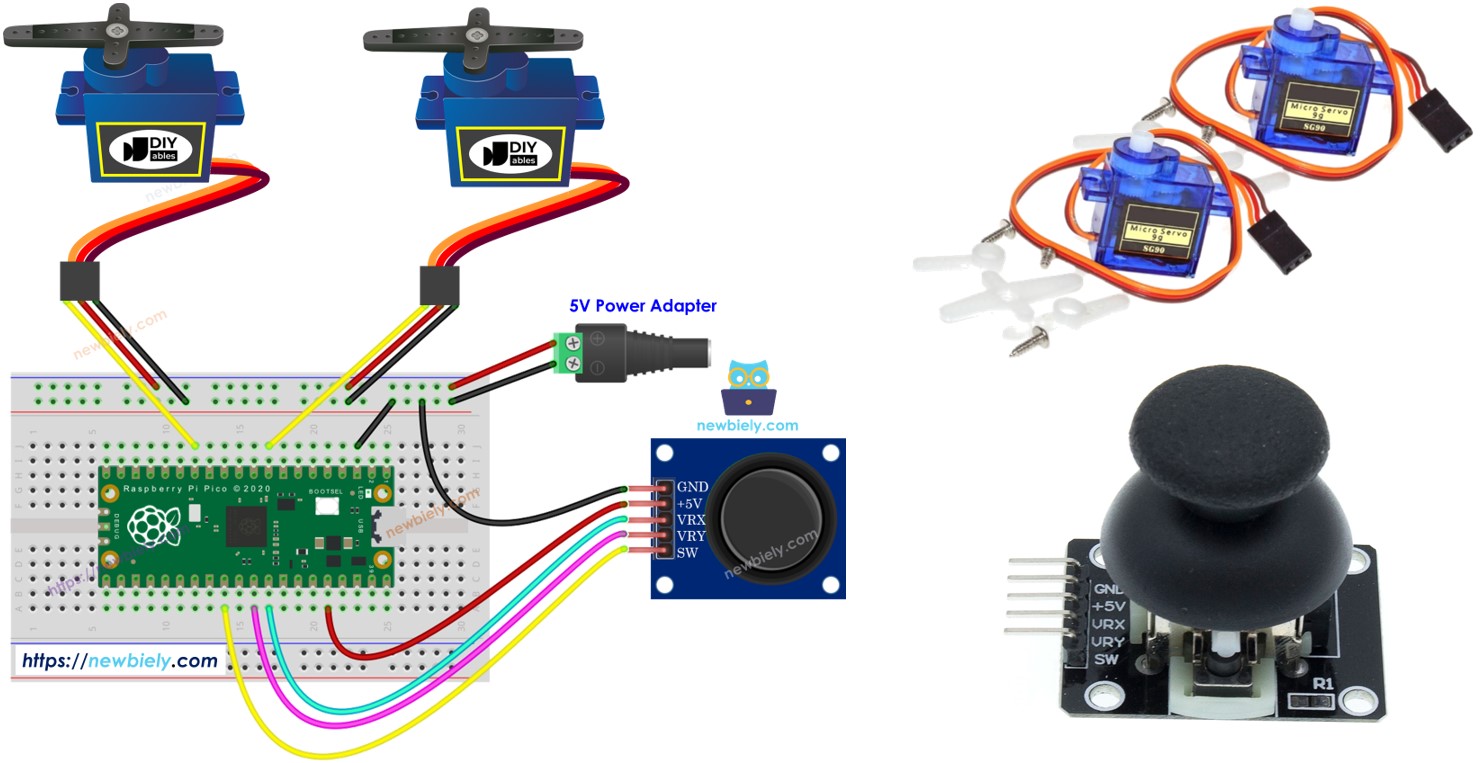
Un joystick comporte deux éléments de contrôle appelés potentiomètres, disposés en croix et formant les axes X et Y. Ces potentiomètres génèrent des signaux, appelés valeur X et valeur Y, qui proviennent des broches VRX et VRY du joystick. Nous utilisons ces signaux pour piloter deux servomoteurs : la valeur X pilote le servomoteur n°1 et la valeur Y pilote le servomoteur n°2. Lorsqu'ils sont utilisés avec un kit pan-tilt, les deux servomoteurs coopèrent pour se déplacer dans les trois dimensions.
L'application peut être utilisée de deux façons :
- Cas d'utilisation 1 : Le déplacement du joystick commande les servomoteurs :
- Les angles de déplacement des servomoteurs correspondent aux mouvements gauche-droite (X) et haut-bas (Y) du joystick.
- Lorsque vous relâchez le joystick, celui-ci et les servomoteurs reviennent à leur position initiale.
- Cas d'utilisation 2: Utilisez le joystick pour diriger les servomoteurs:
- En déplaçant le joystick vers la gauche, le servomoteur n°1 tourne dans le sens des aiguilles d'une montre.
- En déplaçant le joystick vers la droite, le servomoteur n°1 tourne dans le sens antihoraire.
- Déplacer le joystick vers le haut fait tourner le servomoteur n°2 dans le sens des aiguilles d'une montre.
- En déplaçant le joystick vers le bas, le servomoteur n°2 tourne dans le sens antihoraire.
- Relâcher le joystick ne modifie pas les positions des servomoteurs.
- Appuyer sur le bouton du joystick réinitialise les servomoteurs au milieu.
Préparation du matériel
Ou vous pouvez acheter les kits suivants:
| 1 | × | Kit de Capteurs DIYables (18 capteurs/écrans) |
Note d'achat: Si vous utilisez plusieurs servomoteurs, nous recommandons d'utiliser le PCA9685 16 Channel PWM Servo Driver Module pour économiser les broches du MCU et faciliter le câblage.
À propos du joystick et du servomoteur
Si vous n'en savez pas grand-chose sur les détails du joystick et des servomoteurs, tels que le brochage, les fonctionnalités et la façon de les programmer, veuillez consulter ces tutoriels pour en savoir plus.
Diagramme de câblage
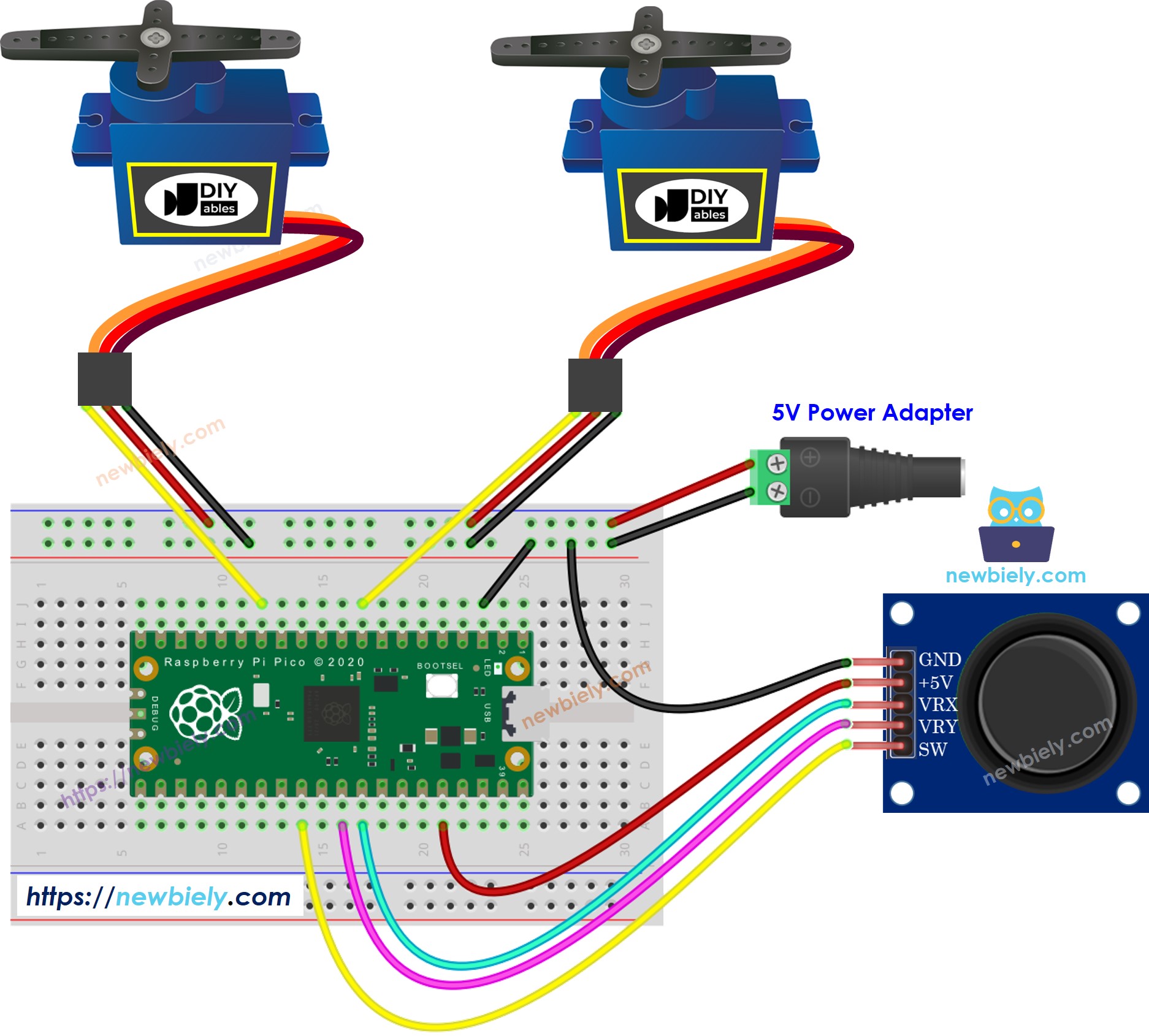
Cette image a été créée avec Fritzing. Cliquez pour agrandir l'image.
Code Raspberry Pi Pico
Code Raspberry Pi Pico - Les servomoteurs tournent en fonction du mouvement du pouce du joystick
Étapes rapides
Veuillez suivre ces instructions étape par étape :
- Assurez-vous que l’IDE Thonny est installé sur votre ordinateur.
- Assurez-vous que le firmware MicroPython est installé sur votre Raspberry Pi Pico.
- Si c'est la première fois que vous utilisez un Raspberry Pico, consultez le tutoriel Raspberry Pi Pico - Premiers pas. pour obtenir des instructions détaillées.
- Connectez le Raspberry Pi Pico au joystick et au servomoteur selon le schéma fourni.
- Connectez le Raspberry Pi Pico à votre ordinateur à l’aide d’un câble USB.
- Lancez l’IDE Thonny sur votre ordinateur.
- Dans l’IDE Thonny, sélectionnez l’interpréteur MicroPython (Raspberry Pi Pico) en naviguant vers Outils Options.
- Dans l’onglet Interpréteur, sélectionnez MicroPython (Raspberry Pi Pico) dans le menu déroulant.
- Assurez-vous que le bon port est sélectionné. L’IDE Thonny détecte normalement le port automatiquement, mais vous devrez peut-être le sélectionner manuellement (par ex., COM3 sur Windows ou /dev/ttyACM0 sur Linux).
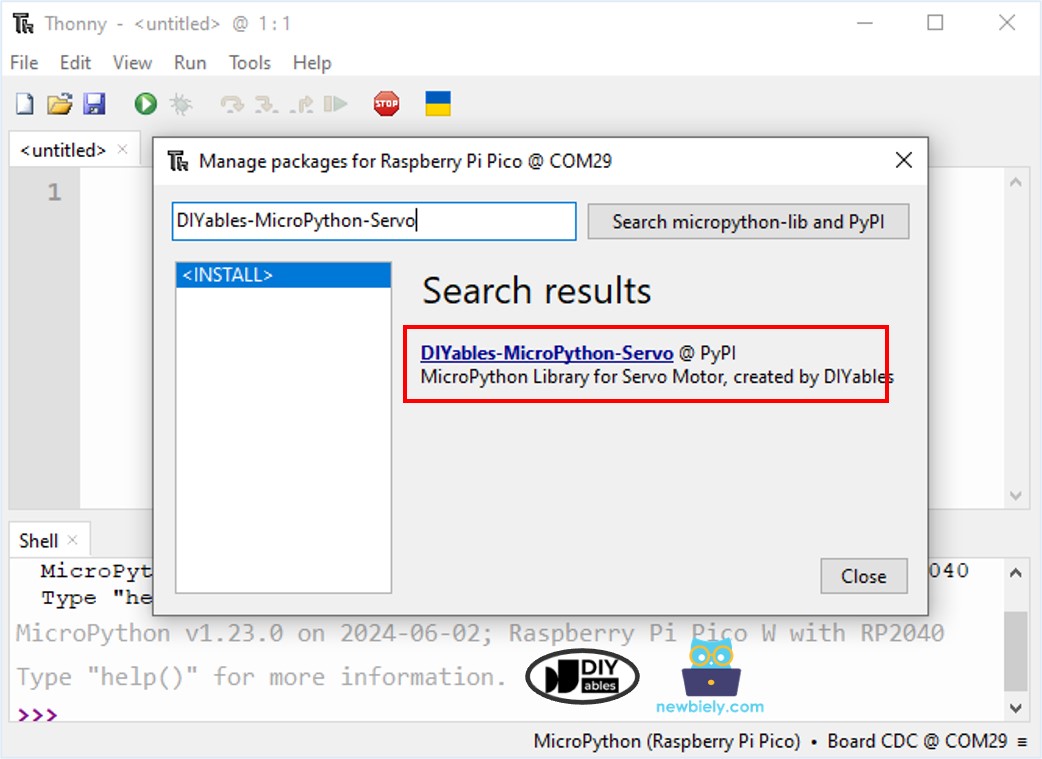
- Accédez à Outils Gérer les paquets dans l’IDE Thonny.
- Recherchez “DIYables-MicroPython-Servo”, puis trouvez la bibliothèque Servo-moteur créée par DIYables.
- Cliquez sur DIYables-MicroPython-Servo, puis cliquez sur le bouton Install pour installer la bibliothèque Servo-moteur.
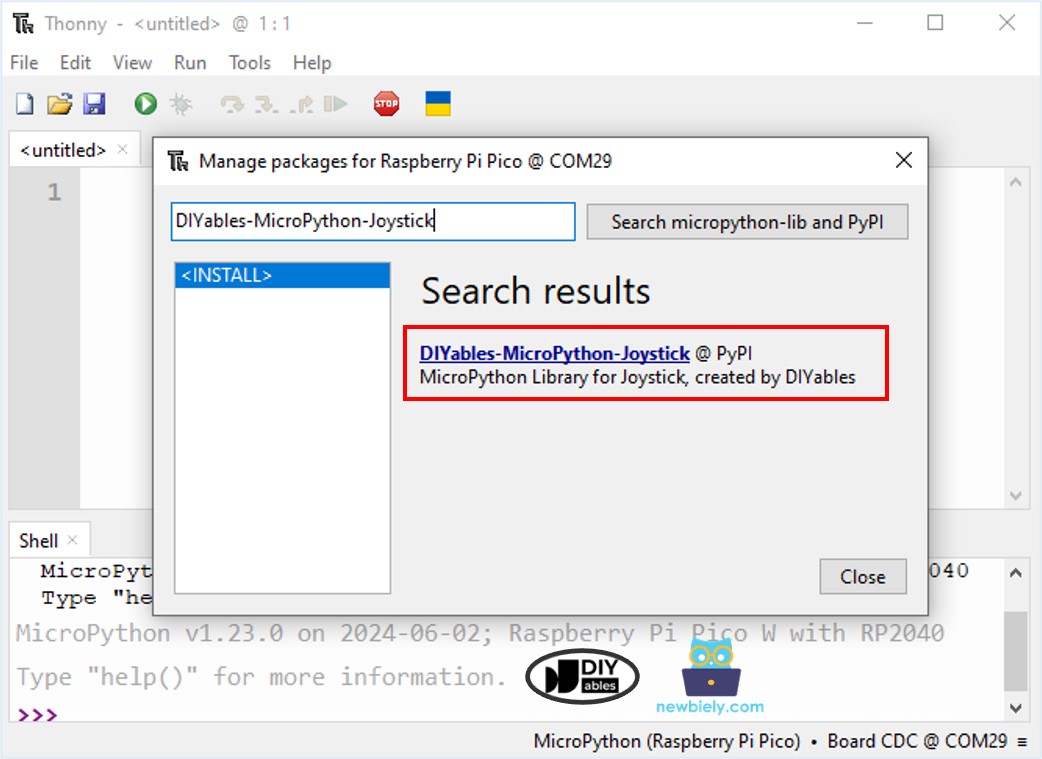
- Recherchez “DIYables-MicroPython-Joystick”, puis trouvez la bibliothèque Joystick créée par DIYables.
- Cliquez sur DIYables-MicroPython-Joystick, puis cliquez sur le bouton Install pour installer la bibliothèque Joystick.
- Copier le code ci-dessus et le coller dans l’éditeur de l’IDE Thonny.
- Enregistrez le script sur votre Raspberry Pi Pico en procédant comme suit :
- Cliquez sur le bouton Enregistrer, ou utilisez les touches Ctrl+S.
- Dans la boîte de dialogue d'enregistrement, vous verrez deux sections : Cet ordinateur et Raspberry Pi Pico. Sélectionnez Raspberry Pi Pico.
- Enregistrez le fichier sous le nom main.py.
- Cliquez sur le bouton vert Exécuter (ou appuyez sur F5) pour exécuter le script. Le script s'exécutera.
- Poussez le joystick dans n'importe quelle direction.
- Observez le servomoteur tourner.
- Vérifiez le message dans le Shell en bas de Thonny.
Code Raspberry Pi Pico - Utilisez le joystick pour commander des servomoteurs
Étapes rapides
- Copiez le code MicroPython fourni et collez-le dans l'éditeur de Thonny.
- Enregistrez le code sur votre Raspberry Pi Pico.
- Cliquez sur le bouton vert Exécuter (ou appuyez sur F5) pour exécuter le script.
- Déplacez le joystick dans n'importe quelle direction.
- Observez le servomoteur en rotation.
- Consultez le message dans le Shell en bas de Thonny.
Explication du code
Regardez les explications dans les commentaires du code source.