ESP8266 - Moteur
Ce tutoriel vous explique comment utiliser l'ESP8266 et ......... pour contrôler ........... . En détail :
- Les types de moteurs pouvant être utilisés avec ESP8266
- Les distinctions entre les différents types de moteurs
- Comment gérer chaque type de moteur
#Types de moteurs
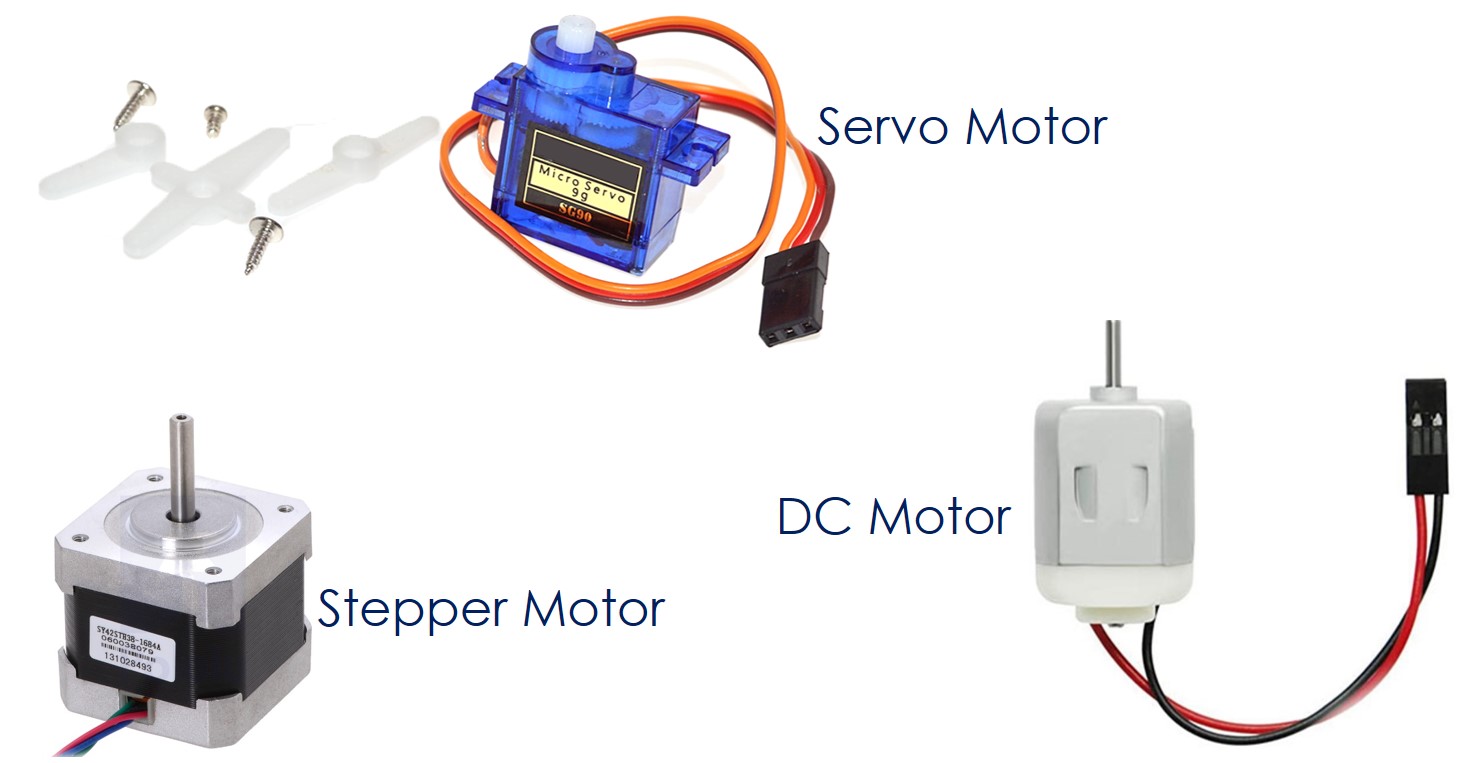
Il existe trois types de moteurs fréquemment utilisés avec Arduino :
- Moteur servo
- Moteur pas à pas
- Moteur à courant continu
Il existe deux variétés distinctes de moteurs servo : le moteur servo 180° et le moteur servo 360°. Généralement, lorsque les gens parlent d'un moteur servo, ils font généralement référence au type 180°.
Un servomoteur à 360° est comparable à un moteur à courant continu, cependant, il ne nécessite pas de pilote matériel.
Moteur servo à 180°
Caractéristiques
- La plage de rotation est comprise entre 0° et 180°.
- Il peut être tourné dans les deux directions, horaire et antihoraire.
- La position de rotation peut être ajustée à un angle particulier entre 0° et 180°.
- La vitesse de rotation peut être régulée, mais pas de manière fluide.
- Aucun pilote matériel supplémentaire n'est nécessaire pour le contrôle, juste une broche ESP8266.
- Une source d'alimentation supplémentaire est requise.
- Le contrôler est simple, utilisez juste un signal PWM.
Application
- Peut être réalisé à l'aide d'un seul servomoteur
- Toute application qui nécessite la rotation d'un angle entre 0° et 180° peut être accomplie avec un seul servomoteur.
Tutoriel sur le servo moteur
Consultez notre ESP8266 - Moteur Servo. pour plus d'informations.
Moteur pas à pas
Caractéristiques
- Fourni
- La quantité de rotation n'est pas limitée.
- La direction de la rotation peut être dans le sens horaire ou antihoraire.
- La position de la rotation peut être précisément ajustée à n'importe quel angle.
- La vitesse de rotation peut être précisément contrôlée, ainsi que l'accélération et la décélération.
- Un matériel supplémentaire et une alimentation électrique sont nécessaires.
- Contrôler la rotation est complexe, donc les débutants devraient utiliser la bibliothèque fournie.
Application
- Automatisation et robotique
- Imprimantes, imprimantes 3D, CNC, traceurs X-Y
- Machines à cocktails
Tutoriel sur le moteur pas à pas
ESP8266 - Moteur pas à pas.. Un guide pour utiliser un moteur pas à pas avec une carte ESP8266 peut être trouvé à l'URL suivante : BASE_URL/tutorials/esp8266/esp8266-stepper-motor
i. Un tutoriel pour contrôler un moteur pas à pas avec un ESP8266 et un pilote L298N est disponible sur ESP8266 - Moteur pas à pas.. 2. Il existe un guide pour utiliser un ESP8266 et un pilote L298N afin de contrôler un moteur pas à pas. 3. Pour apprendre à utiliser un ESP8266 et un pilote L298N pour contrôler un moteur pas à pas, visitez ESP8266 - Moteur pas à pas.. 4. Un tutoriel sur l'utilisation d'un ESP8266 et d'un pilote L298N pour contrôler un moteur pas à pas est disponible sur ESP8266 - Moteur pas à pas.. 5. Pour des instructions sur la façon de contrôler un moteur pas à pas avec un ESP8266 et un pilote L298N, veuillez consulter ESP8266 - Moteur pas à pas..
Moteur à courant continu
Caractéristiques
- Le montant de la rotation n'est pas limité.
- La direction de la rotation peut être dans le sens horaire ou antihoraire.
- Il est très difficile de tourner à un angle spécifique avec précision.
- Il est facile de contrôler la vitesse, mais il est difficile de la contrôler précisément à une certaine valeur.
- Un pilote matériel est nécessaire.
- Une alimentation supplémentaire est également nécessaire.
- Le contrôler est simple, il suffit d'utiliser un signal PWM haute tension.
※ Note:
- Pour réguler la position d'un moteur à courant continu, du matériel supplémentaire est nécessaire, connu sous le nom de codeur, et une méthode de contrôle en boucle fermée telle que la commande PID doit être mise en œuvre. Cela peut être difficile pour ceux qui sont nouveaux dans le processus.
- La régulation de la vitesse est beaucoup plus simple, avec des options telles que lent, moyen, rapide et très rapide, ainsi que la possibilité de régler la vitesse à un certain pourcentage du maximum. Cependant, pour contrôler le nombre de révolutions par seconde, un codeur et une méthode de contrôle en boucle fermée telle que la commande PID doivent être utilisés. Cela représente une tâche difficile pour les débutants.
- Heureusement, certains moteurs à courant continu sont équipés d'un codeur intégré, ce qui facilite la gestion de la position du moteur.
Application
- Auparavant utilisé pour gérer quelque chose qui nécessite une rotation continue, mais la vitesse n'a pas besoin d'être déterminée. Les exemples incluent les ventilateurs, les pompes, les voitures télécommandées, les perceuses, etc.
※ Note:
Il existe deux types principaux de moteurs à courant continu : à balais et sans balais. Les moteurs à courant continu à balais sont couramment utilisés dans les projets de bricolage.
Tutoriel sur le moteur à courant continu
Découvrez ce tutoriel sur ESP8266 - Moteur à courant continu. ! Apprenez à utiliser un ESP8266 pour contrôler un moteur CC.
Guide de sélection de moteur
Lors de la sélection d'un moteur pour un projet, de nombreux facteurs doivent être pris en compte, tels que le poids à supporter, l'alimentation électrique et les caractéristiques de l'application :
- Si votre projet nécessite une rotation entre 0° et 180°, recherchez un servomoteur 180° approprié.
- Si votre projet requiert une rotation précise à n'importe quelle position, un moteur pas à pas est la meilleure option.
- Si votre projet nécessite une rotation continue sans position spécifique, un moteur à courant continu ou un servomoteur 360° est le choix idéal.