ESP8266 - Actionneur de retour d'information
Dans un tutoriel précédent, nous avons discuté de l'ESP8266 - Actionneur.. Ce tutoriel vous instruit sur l'actionneur linéaire à retour (également connu sous le nom d'actionneur linéaire à feedback). Ce type d'actionneur linéaire fournit des informations pour identifier la position de sa course et la contrôler. Plus précisément, nous allons apprendre :
- Le fonctionnement d'un actionneur linéaire à retour d'information
- Comment déterminer la position de l'actionneur linéaire à retour d'information (en millimètres)
- Comment contrôler la position d'un actionneur linéaire
Préparation du matériel
Ou vous pouvez acheter les kits suivants:
| 1 | × | Kit de Capteurs DIYables (18 capteurs/écrans) |
À propos de l'actionneur linéaire à retour d'information
Un actionneur linéaire avec retour d'information est celui qui possède un signal pour identifier sa position et la gérer. Un potentiomètre est utilisé pour générer la valeur de tension en relation avec la position de la course comme retour d'information.
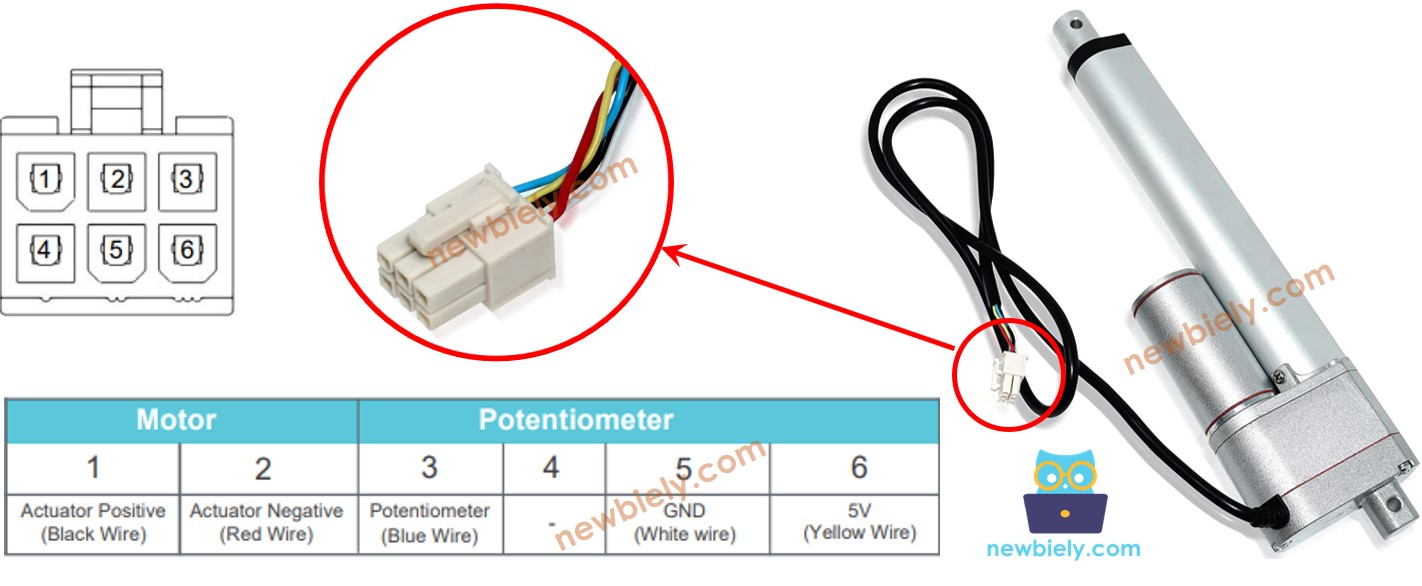
Brochage de l'actionneur linéaire à retour d'information
Un actionneur linéaire à retour d'information possède 5 fils :
- Fil positif de l'actionneur : Ce fil est utilisé pour contrôler l'actionneur linéaire en appliquant une haute tension (12V, 24V, 48V...).
- Fil négatif de l'actionneur : Ce fil est utilisé pour contrôler l'actionneur linéaire en appliquant une haute tension (12V, 24V, 48V...).
- Fil de 5V : ce fil est utilisé pour le potentiomètre de retour. Il doit être connecté à 5V ou 3.3V.
- Fil GND : ce fil est utilisé pour le potentiomètre de retour. Il doit être connecté à GND.
- Fil de potentiomètre : (également appelé fil de retour, ou fil de sortie) ce fil délivre la valeur de tension selon la position de la course.
Comment ça fonctionne
Si nous appliquons une haute tension aux fils positif et négatif, la course de l'actionneur sera étendue ou rétractée. Plus précisément :
- Si 12V (12V, 24V, 48V…) est connecté au fil positif et GND au fil négatif, l'actionneur linéaire se déploiera à pleine vitesse jusqu'à ce qu'il atteigne la limite.
- Si 12V (12V, 24V, 48V…) est connecté au fil négatif et GND au fil positif, l'actionneur linéaire se rétractera à pleine vitesse jusqu'à ce qu'il atteigne la limite.
- Si l'alimentation est coupée de l'actionneur (GND aux fils positif et négatif), l'actionneur cessera de se déployer/se rétracter.
※ Note:
- La tension nécessaire pour faire fonctionner l'actionneur est déterminée par ses spécifications. Pour connaître la tension exacte, consultez la fiche technique ou le manuel.
- Même lorsque l'alimentation est coupée, l'actionneur peut maintenir sa position tout en supportant une charge.
La tension dans le fil du potentiomètre est directement liée à la position de la course de l'actionneur. En mesurant cette tension, nous pouvons déterminer la position de la course.
Schéma de câblage
Retirez les trois cavaliers du module L298N avant de connecter les fils.
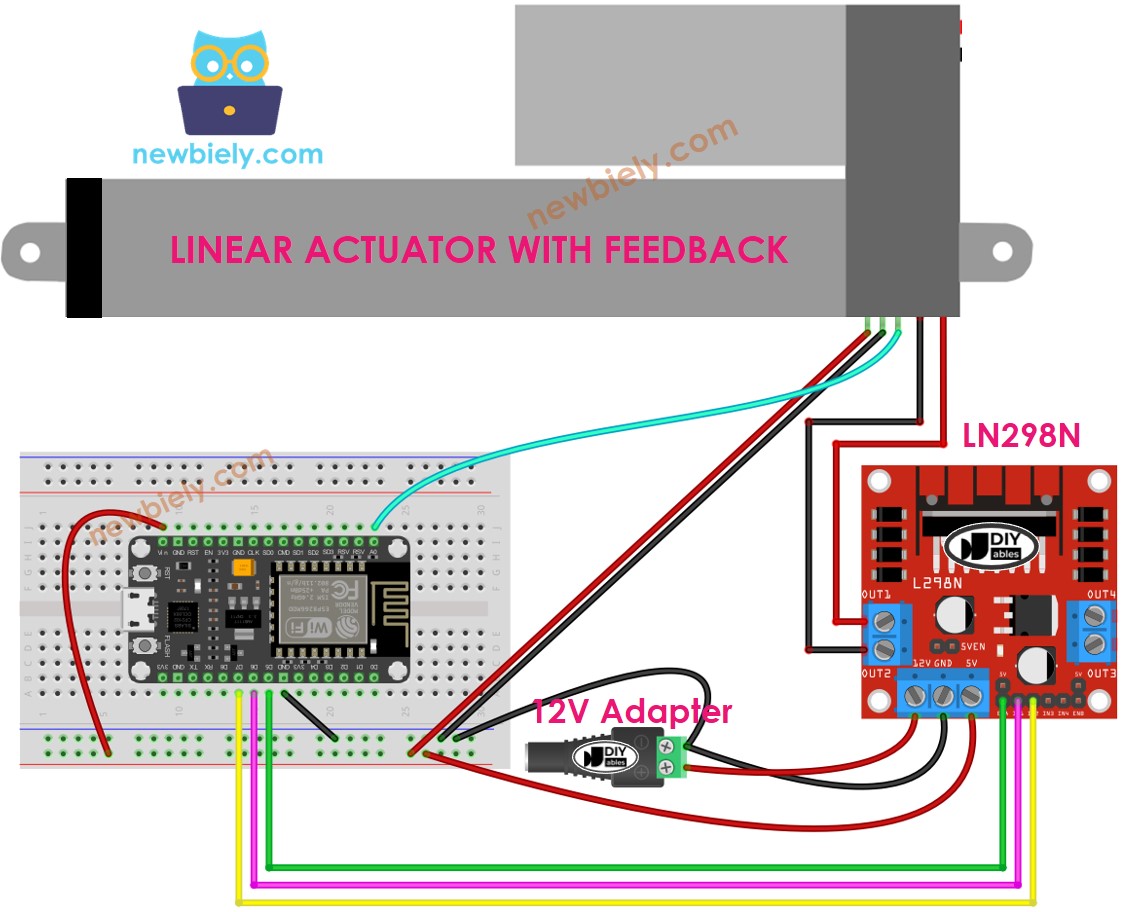
Cette image a été créée avec Fritzing. Cliquez pour agrandir l'image.
Pour plus d'informations, consultez Brochage ESP8266. et Comment alimenter l'ESP8266..
Comment contrôler l'extension/la rétraction d'un actionneur linéaire
Consultez le tutoriel ESP8266 - Actionneur..
Comment trouver la position de l'actionneur linéaire
Ceci est une illustration de la façon de localiser le trait sur un actionneur linéaire.
Étalonnage
- Déterminez la longueur de la course de l'actionneur (en millimètres) en mesurant avec une règle ou en consultant la fiche technique.
- Pour déterminer les valeurs de sortie lorsque l'actionneur linéaire est entièrement étendu et entièrement rétracté, exécutez le code ci-dessous.
- Vous observerez le journal sur le moniteur série, comme démontré dans l'exemple ci-dessous.
Notez les trois valeurs dans le code ci-dessous. Si les valeurs minimale et maximale sont inversées, inversez IN1_PIN et IN2_PIN.
Prenez note des trois valeurs dans le code ci-dessous. Si les valeurs minimale et maximale sont transposées, échangez les IN1_PIN et IN2_PIN.
Code ESP8266 qui calcule la position de l'actionneur
- Mettez à jour le code avec les trois valeurs étalonnées.
- Téléchargez le code sur ESP8266.
- Vérifiez le résultat sur le moniteur série.