Arduino UNO Q - Capteur Ultrasonique Contrôle la LED
Dans ce tutoriel, vous apprendrez à utiliser un capteur ultrasonique pour contrôler une LED en fonction de la distance d'un objet :
- Lorsqu'un objet est proche du capteur, la LED s'allume.
- Lorsque l'objet s'éloigne, la LED s'éteint.
Matériel Requis
Ou vous pouvez acheter les kits suivants:
| 1 | × | Kit de Capteurs DIYables (18 capteurs/écrans) |
Note d'achat: Pour simplifier le processus de câblage, nous recommandons d'utiliser le LED Module, qui est livré avec une résistance intégrée.
À Propos de la LED et du Capteur Ultrasonique
Apprenez-en plus sur la LED et les capteurs ultrasoniques dans les tutoriels ci-dessous :
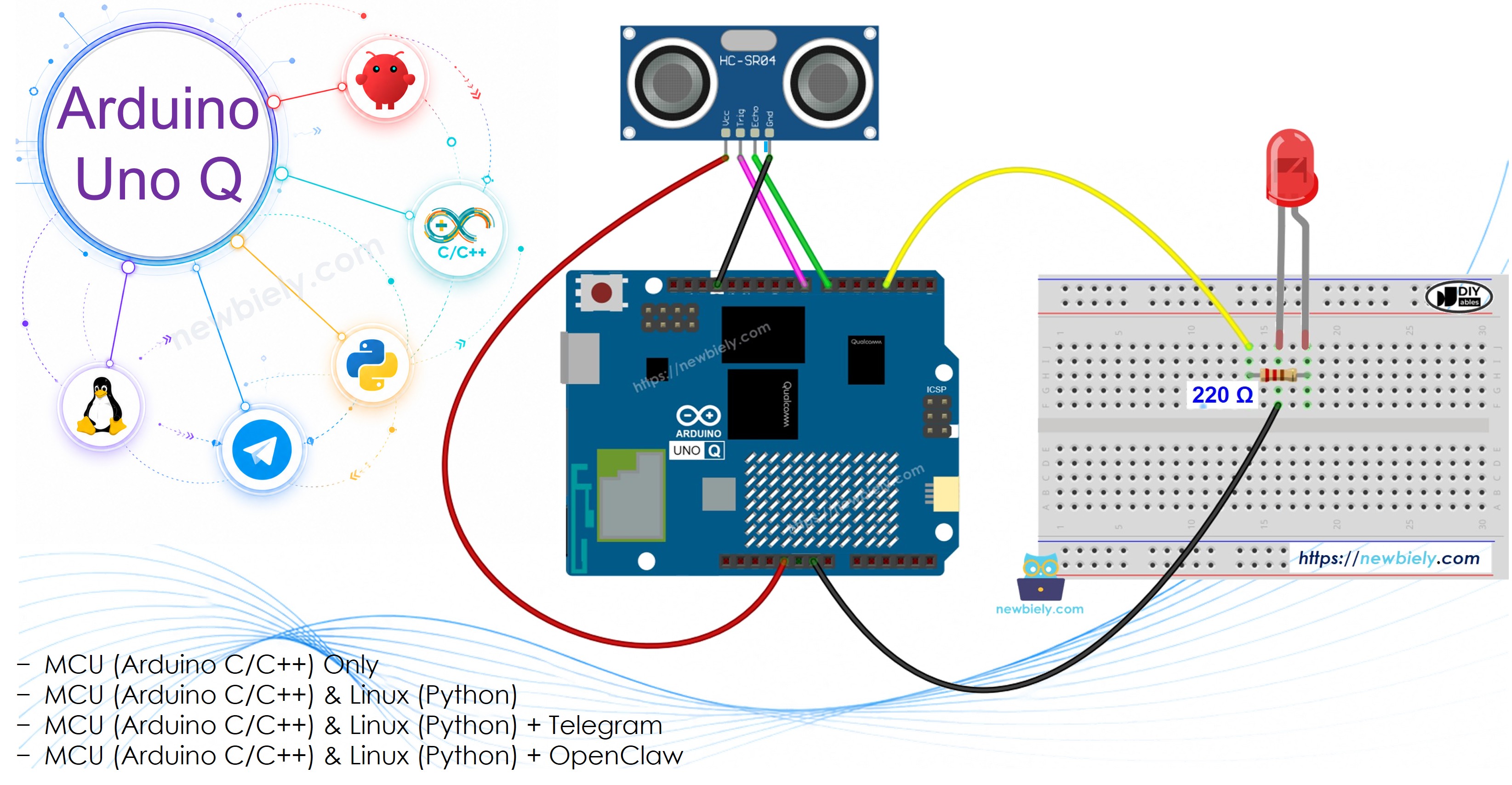
Schéma de Câblage
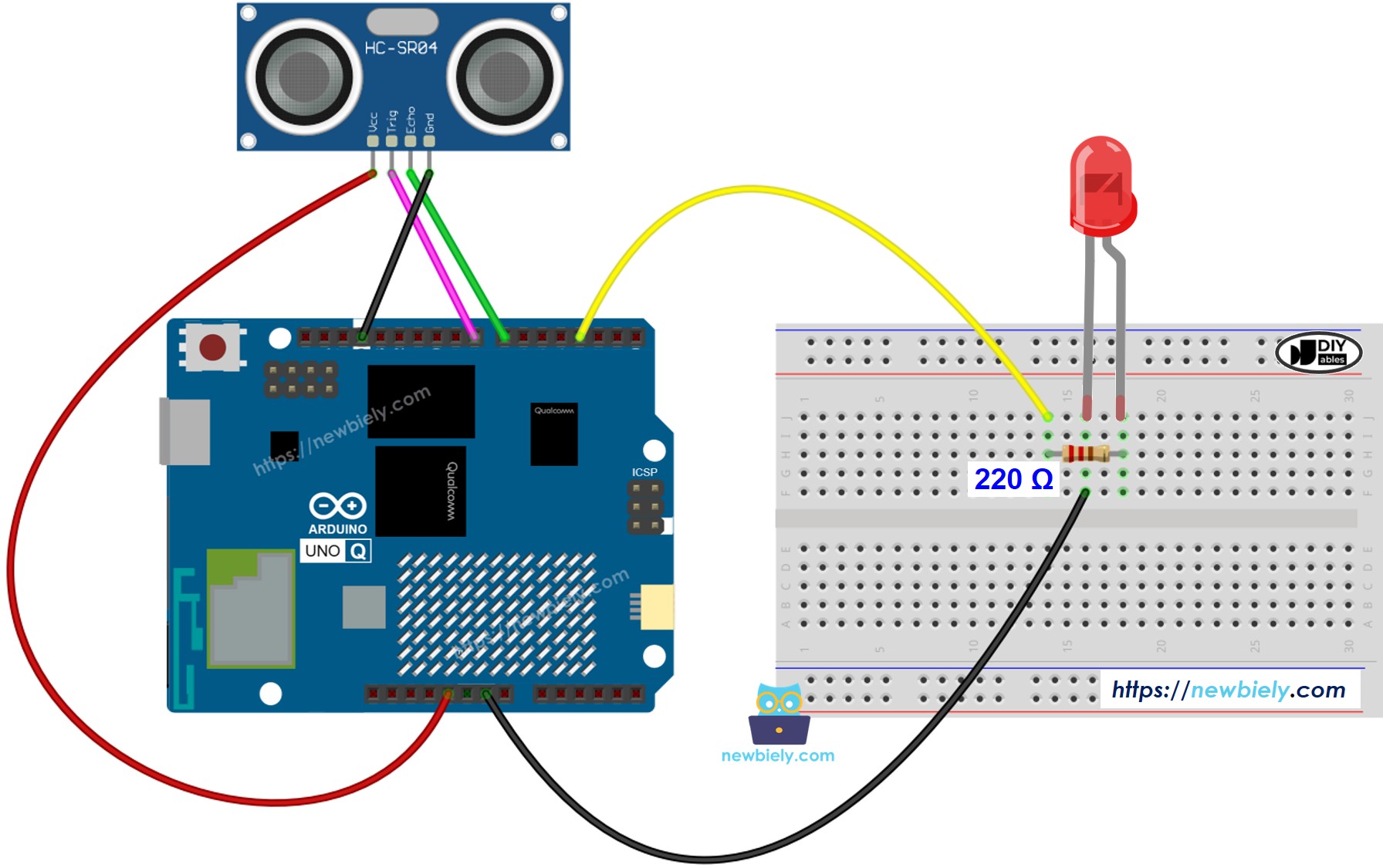
Cette image a été créée avec Fritzing. Cliquez pour agrandir l'image.
Code MCU
L'Arduino UNO Q dispose de deux processeurs : le MCU STM32 (gère le contrôle matériel en temps réel) et le MPU Qualcomm (exécute Debian Linux). Dans cette section, seul le MCU STM32 est programmé — le côté Linux reste inactif. Une section ultérieure montrera comment les deux processeurs fonctionnent ensemble.
Étapes Rapides
- Première utilisation de l'Arduino UNO Q ? Suivez le tutoriel Démarrer avec Arduino UNO Q pour préparer votre environnement de développement avant de continuer.
- Câblez les composants : Connectez TRIG → broche 8, ECHO → broche 7, LED (avec résistance 220 Ω) → broche 3.
- Connectez : Branchez l'Arduino UNO Q à votre ordinateur avec un câble USB-C.
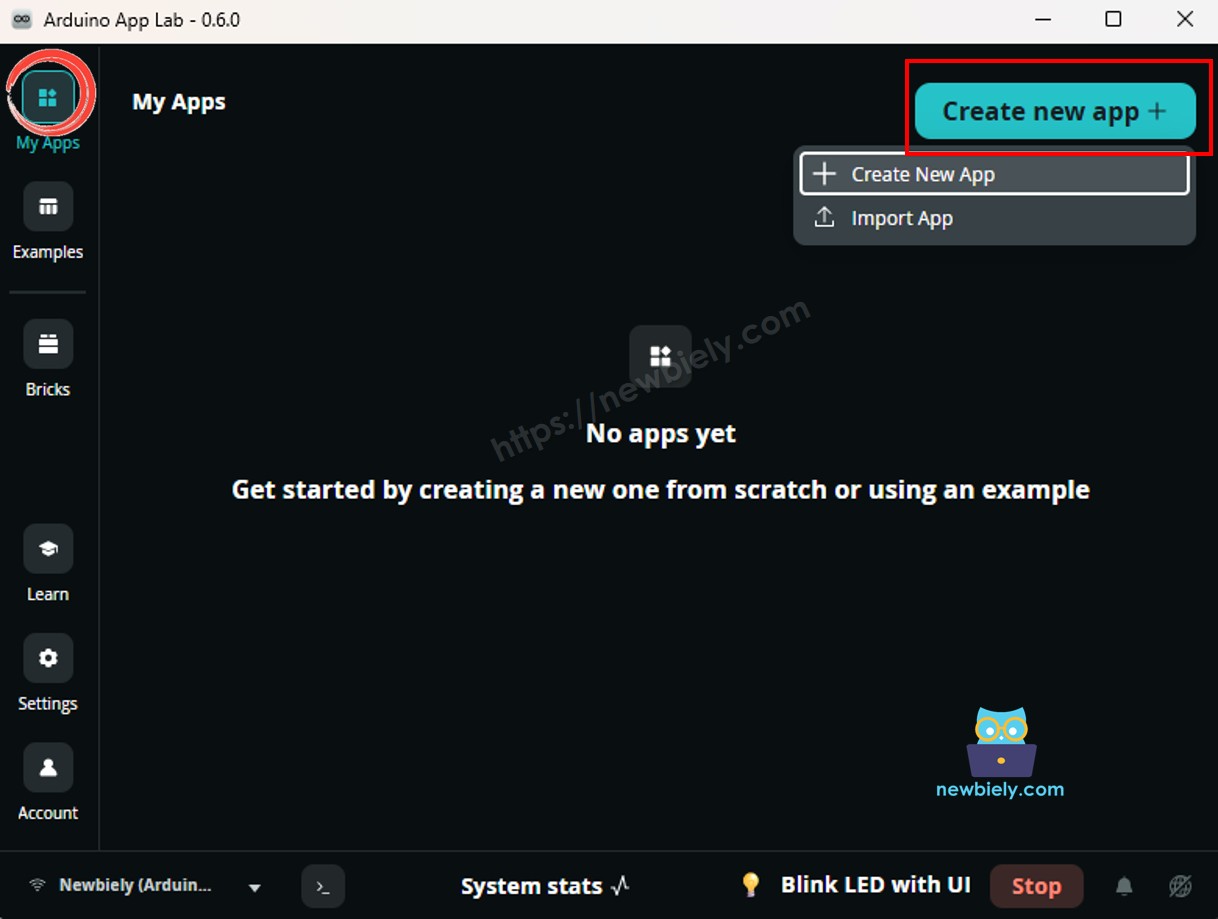
- Ouvrez Arduino App Lab : Lancez Arduino App Lab et attendez qu'il détecte votre Arduino UNO Q.
- Créez une nouvelle application : Cliquez sur le bouton Créer une nouvelle application.
- Donnez un nom à l'application, par exemple : DIYables_UltrasonicLED
- Cliquez sur Créer pour confirmer.
- Vous verrez un ensemble de dossiers et fichiers générés dans votre nouvelle application.
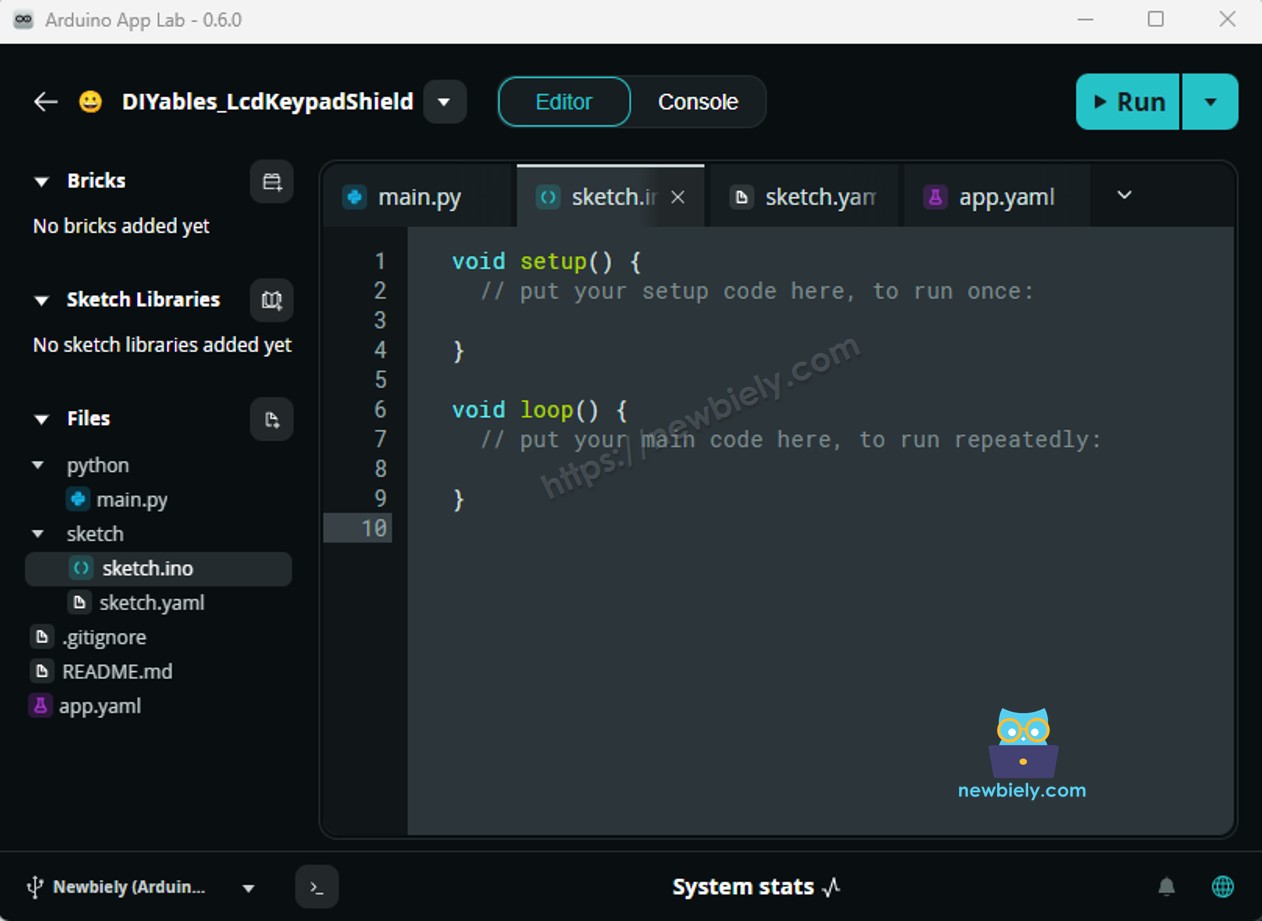
- Trouvez le fichier sketch/sketch.ino — c'est là que vous collerez le code MCU.
- Install the library: Click the Add sketch library button (the open book icon with a + sign) in the left sidebar.
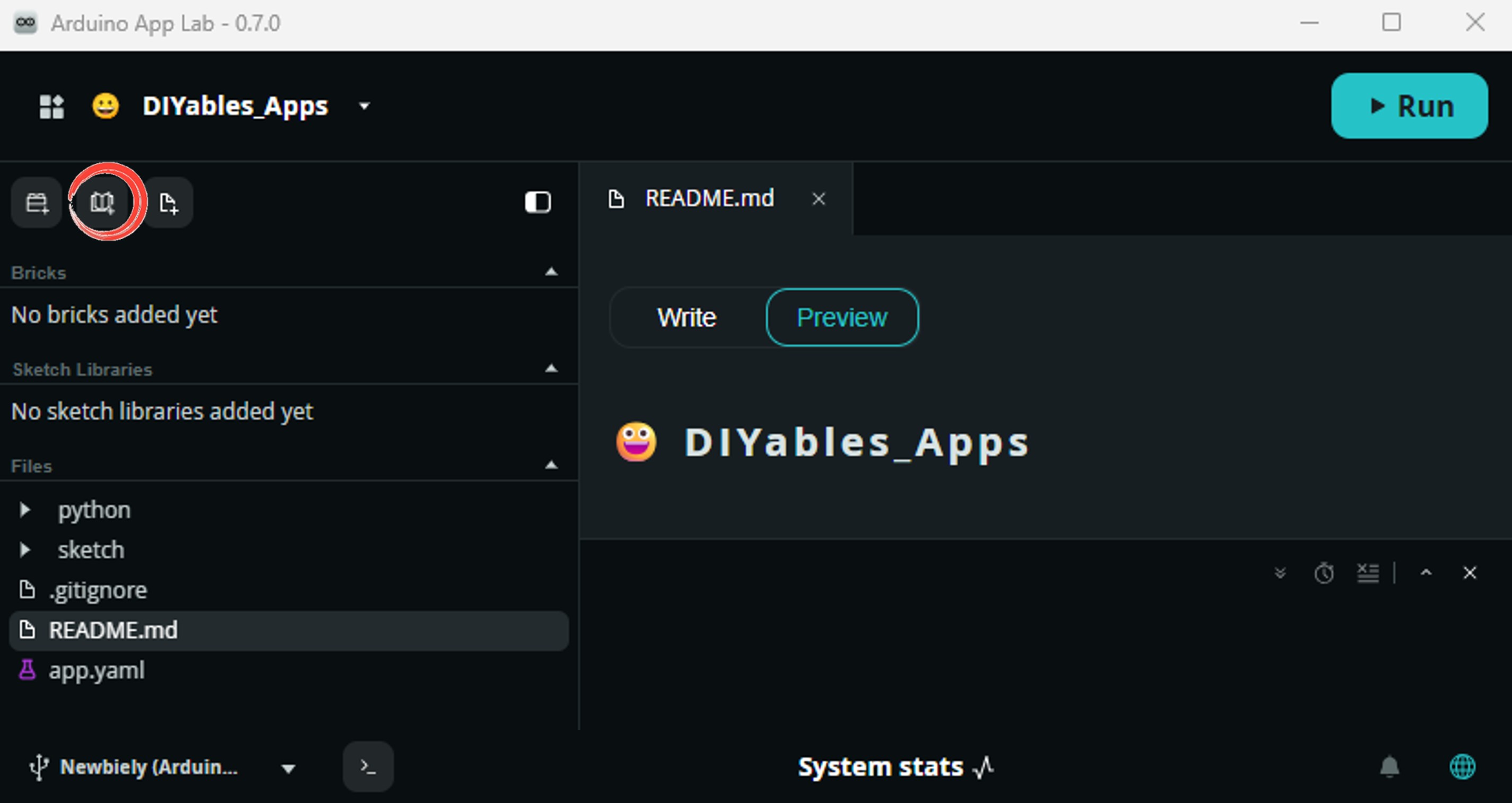
- Search for Arduino_RouterBridge created by Arduino and click the Install button.
- Téléversez : Cliquez sur le bouton Exécuter dans Arduino App Lab pour compiler et téléverser vers le STM32.
- Testez : Approchez votre main du capteur — la LED s'allume lorsque vous passez à moins de 50 cm.
※ Note:
Ce code est à des fins pédagogiques. Le capteur ultrasonique est sensible au bruit. Pour une utilisation en production, appliquez le filtre anti-bruit du tutoriel Capteur Ultrasonique.
Programmation Bridge Linux + MCU
L'Arduino UNO Q dispose de deux processeurs qui fonctionnent ensemble : le MPU (Qualcomm, exécute Debian Linux) et le MCU (STM32, exécute Zephyr OS avec votre sketch Arduino). Ils communiquent via RPC grâce à la bibliothèque Arduino_RouterBridge — jamais via des ports série bruts.
- Le capteur ultrasonique et la LED sont connectés au MCU (STM32) — TRIG sur la broche 8, ECHO sur la broche 7, LED sur la broche 3.
- Le MPU ne peut pas les contrôler directement — il appelle Bridge.call("check_distance") sur le MCU, qui mesure la distance et active la LED en conséquence.
- Le MPU dispose du Wi-Fi — car le MPU exécute Debian Linux complet avec Wi-Fi, il peut utiliser Telegram et boucler la vérification automatiquement.
- Communication : Bridge.call() du côté Linux invoque Bridge.provide_safe() du côté MCU (car digitalWrite() est une API matérielle)
- ⚠️ Réservé : /dev/ttyHS1 (Linux) et Serial1 (MCU) sont utilisés par l'Arduino Router — ne les ouvrez jamais directement
En résumé : Python appelle la vérification → le MCU mesure la distance → le MCU active la LED et affiche sur le Monitor.
Code MCU — contrôle LED capteur ultrasonique avec Bridge et sortie Monitor :
Script Python (Arduino App Lab) — lancer la boucle de vérification de distance depuis Linux :
- Remarque : Assurez-vous que Bridge.begin() est appelé dans le sketch MCU et que le sketch est téléversé avant d'exécuter le script Python du côté Linux.
- ⚠️ Avertissement : N'ouvrez jamais directement /dev/ttyHS1 (sous Linux) ni n'utilisez Serial1 (sur MCU) dans votre code — ils sont réservés par l'Arduino Router et y accéder brisera le Bridge.
Étapes Rapides
- Téléversez le sketch MCU : Ouvrez Arduino App Lab, créez une nouvelle application, collez le sketch MCU Bridge dans sketch/sketch.ino, installez la bibliothèque Arduino_RouterBridge, et cliquez sur Exécuter.
- Ajoutez le script Python : Collez le code Python ci-dessus dans l'onglet Python de la même application.
- Exécutez l'application : Cliquez sur Exécuter — Python appelle check_distance toutes les 500 ms ; le MCU mesure la distance et contrôle la LED.
- Vérifiez la console : Ouvrez l'onglet Console → sous-onglet MCU Monitor pour voir la distance et l'état de la LED.
Sortie Console App Lab
Intégration Telegram
Surveillez le capteur ultrasonique et l'état de la LED à distance via Telegram.
Si vous n'avez pas encore de bot Telegram, consultez Arduino UNO Q - Bot Telegram pour obtenir votre token de bot avant de continuer.
Sketch MCU : Conservez le même sketch MCU de la section Bridge précédente — aucune modification nécessaire. Assurez-vous qu'il est déjà téléversé et en cours d'exécution sur le STM32 avant de continuer.
Script Python (Arduino App Lab) — bot Telegram pour la surveillance ultrasonique LED :
- Remarque : Remplacez YOUR_BOT_TOKEN par le token obtenu auprès de @BotFather sur Telegram.
- Le bot vérifie continuellement la distance et contrôle la LED tout en écoutant les commandes Telegram.
- Envoyez /read pour demander la confirmation que l'état a été enregistré dans le MCU Monitor.
Étapes Rapides
- Téléversez le sketch MCU : Utilisez le sketch MCU Bridge de la section précédente (téléversez-le d'abord si ce n'est pas déjà fait).
- Collez le script Telegram : Copiez le code Python ci-dessus dans l'onglet Python de votre application dans Arduino App Lab.
- Configurez votre token : Remplacez YOUR_BOT_TOKEN dans le script par votre vrai token de bot.
- Exécutez l'application : Cliquez sur Exécuter — le bot commence à contrôler la LED et à écouter les messages Telegram.
- Testez : Envoyez /read — le bot répond avec la distance actuelle et l'état de la LED.
Sortie Console App Lab

ArduinoBot
Intégration d'OpenClaw
Vous pouvez adapter OpenClaw à ce tutoriel en vous référant aux instructions du tutoriel Arduino UNO Q - OpenClaw.
Idées d'Applications/Projets
- Lumière d'avertissement de proximité : Faire clignoter une LED lorsqu'un objet se rapproche (combiner avec des seuils de distance)
- Veilleuse automatique : Allumer une LED lorsque quelqu'un s'approche d'un capteur la nuit
- Indicateur d'obstacle : Utiliser la LED pour indiquer quand un robot est trop proche d'un mur
- Alerte de sécurité enfant : Fixer sur un tiroir ou une armoire — la LED s'allume lorsque quelqu'un y accède
- Déclencheur de luminosité d'affichage : Activer un rétroéclairage lorsqu'un utilisateur est détecté à proximité
Relevez le Défi
- Facile : Changez DISTANCE_THRESHOLD de 50 cm à 20 cm et observez la différence
- Moyen : Ajoutez plusieurs seuils — clignotement lent à 50 cm, clignotement rapide à 30 cm, allumage permanent à 15 cm
- Avancé : Envoyez la valeur réelle de la distance (en cm) directement à l'utilisateur Telegram sous forme de message