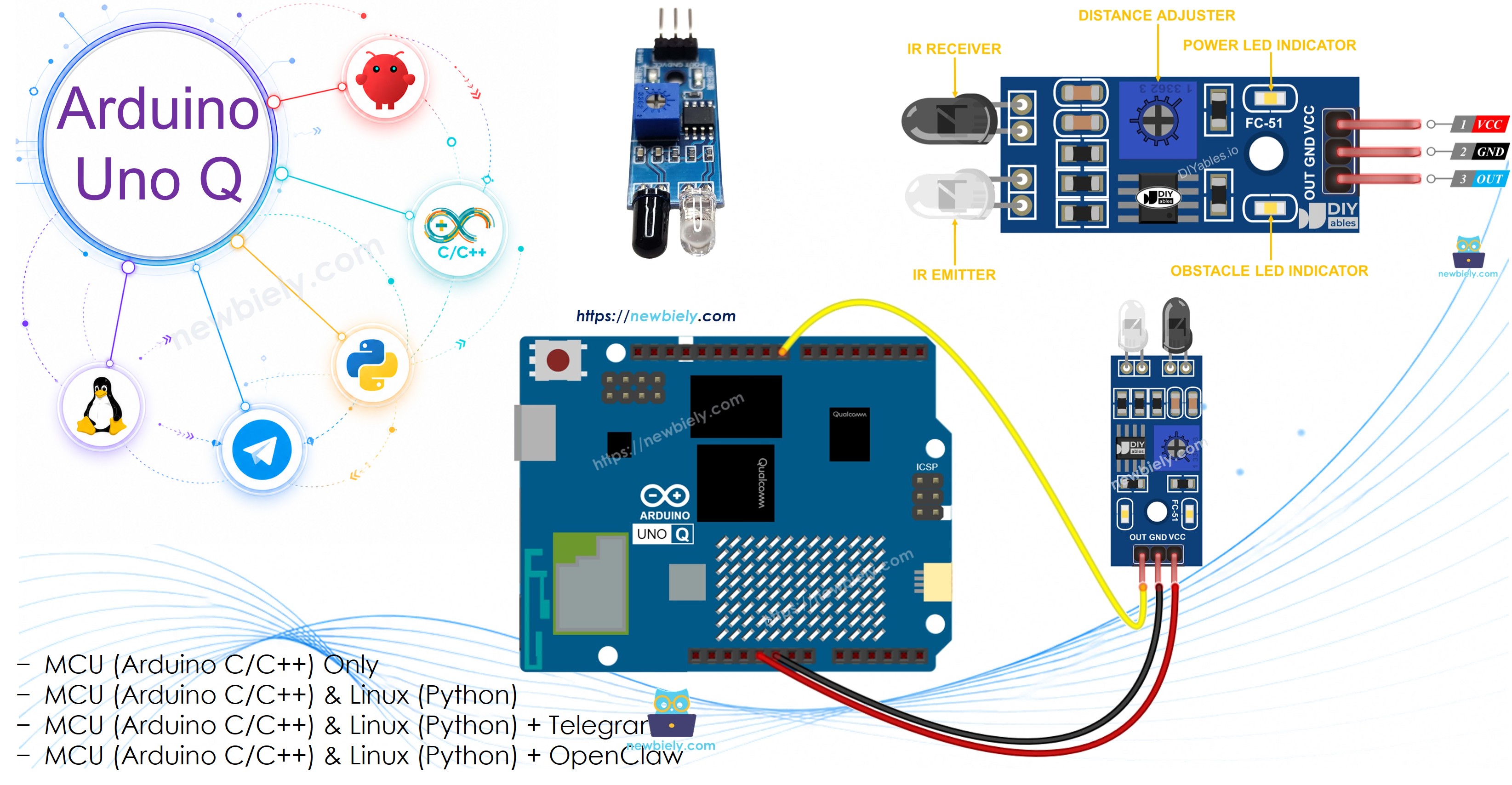
Arduino UNO Q - Capteur Éviteur d'Obstacles
Le capteur IR d'évitement d'obstacles utilise la lumière infrarouge pour détecter les objets devant lui. Il signale un signal numérique LOW lorsqu'un obstacle est présent et HIGH lorsque le chemin est libre. Avec Bridge et Telegram, votre Arduino UNO Q peut envoyer des alertes instantanées lorsqu'un objet entre dans la zone de détection.
Dans ce tutoriel, vous apprendrez :
- Comment fonctionne le capteur IR d'évitement d'obstacles
- Comment câbler le capteur au MCU Arduino UNO Q
- Comment lire la sortie numérique du capteur d'obstacles
- Comment utiliser Bridge pour détecter les événements d'obstacles et exposer l'état à Python sur Arduino UNO Q
- Comment recevoir des alertes Telegram lorsqu'un obstacle est détecté sur Arduino UNO Q
- Comment utiliser OpenClaw sur Arduino UNO Q avec le capteur d'évitement d'obstacles
Matériel Requis
Ou vous pouvez acheter les kits suivants:
| 1 | × | Kit de Capteurs DIYables (18 capteurs/écrans) |
À Propos du Capteur IR d'Évitement d'Obstacles
Le capteur infrarouge d'évitement d'obstacles détecte les objets à l'aide d'un émetteur et d'un récepteur IR. L'émetteur émet un faisceau IR ; lorsqu'un objet réfléchit le faisceau en retour, le récepteur le détecte et la broche OUT passe à LOW.
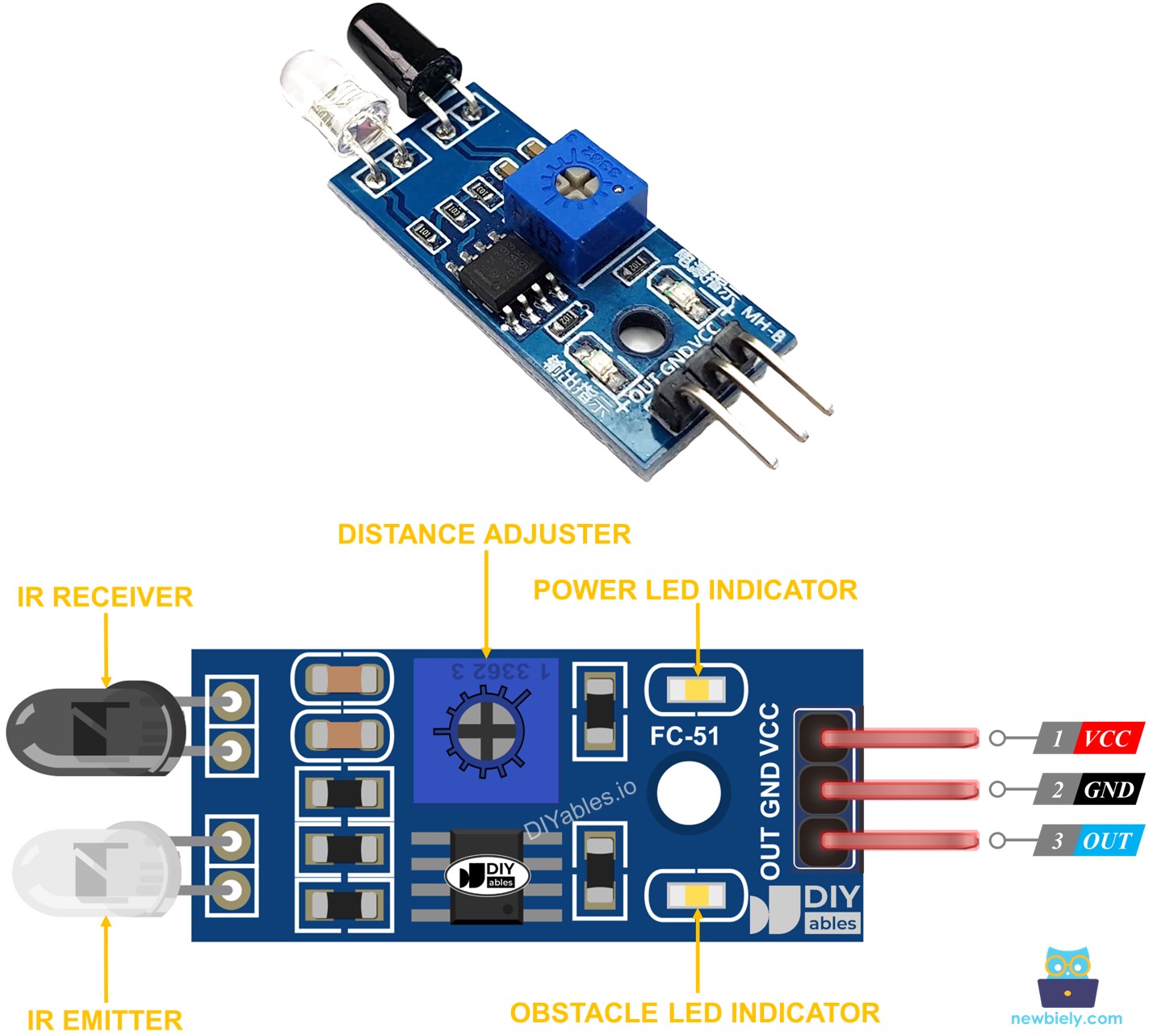
Brochage
- Broche VCC : Connecter à VCC (3,3V ou 5V)
- Broche GND : Connecter à GND (0V)
- Broche OUT : Sortie numérique — LOW = obstacle détecté, HIGH = aucun obstacle
Fonctionnement
- Lorsqu'un obstacle est devant le capteur : broche OUT = LOW
- Lorsque le chemin est libre : broche OUT = HIGH
- Portée de détection : 2 cm à 30 cm — ajustable via le potentiomètre intégré
- Angle de détection : environ 35°
※ Note:
Pendant l'expédition, l'émetteur et le récepteur IR peuvent se désaligner. Si le capteur ne répond pas correctement, pliez-les doucement pour les rendre parallèles l'un à l'autre.
Schéma de Câblage
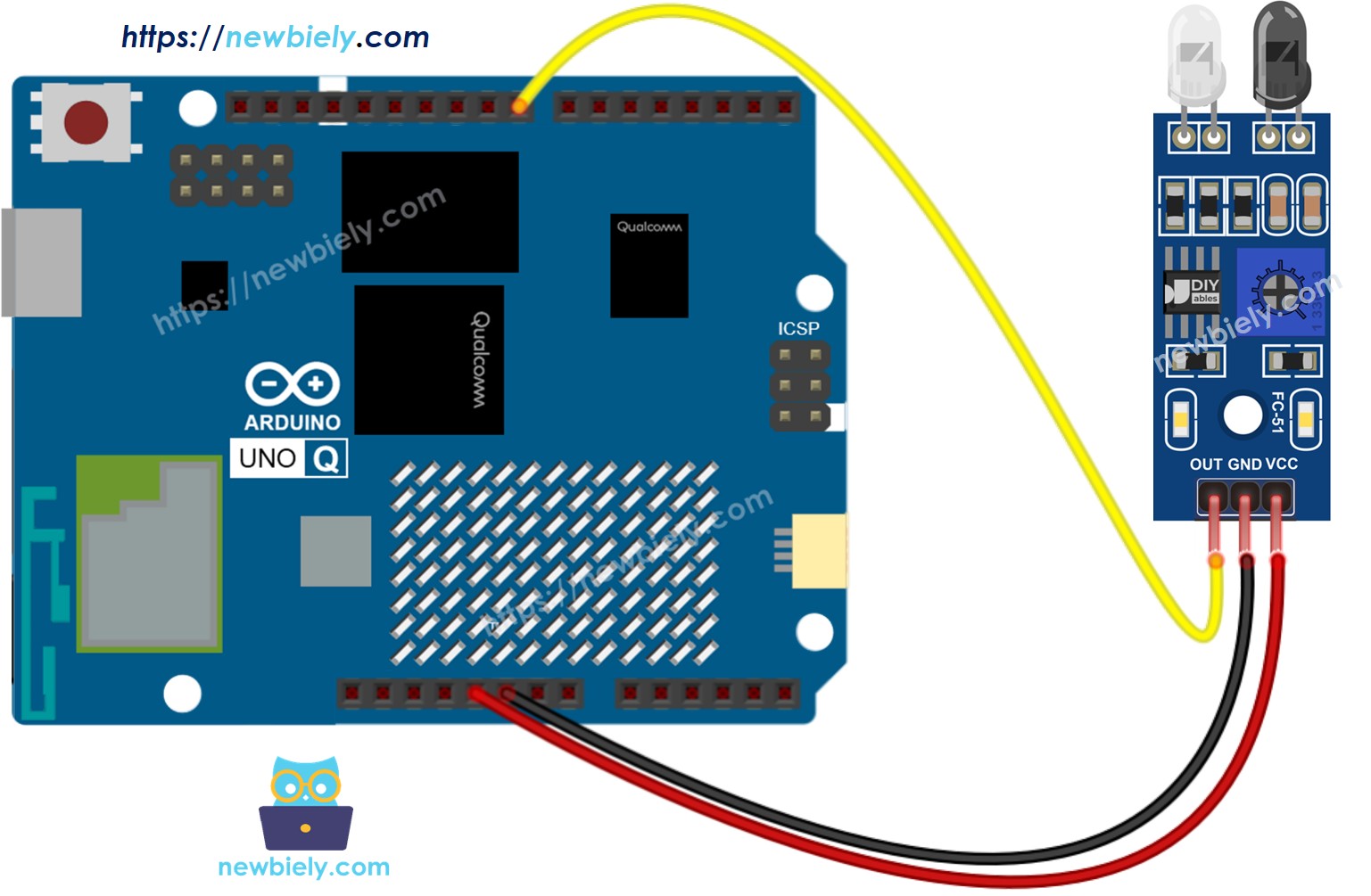
Cette image a été créée avec Fritzing. Cliquez pour agrandir l'image.
| Broche Capteur Obstacle IR | MCU Arduino UNO Q |
|---|---|
| VCC | 3.3V |
| GND | GND |
| OUT | D8 |
Comment Programmer le Capteur IR d'Évitement d'Obstacles
- Configurez la broche du capteur comme entrée numérique :
- Lisez la sortie — LOW signifie obstacle détecté, HIGH signifie libre :
Code Arduino UNO Q
L'Arduino UNO Q dispose de deux processeurs fonctionnant ensemble :
- Le STM32 MCU lit le capteur toutes les 100 ms et rapporte le résultat via Serial
- Le Qualcomm MPU exécute Debian Linux avec Wi-Fi — dans cette section, seul le MCU est programmé. Une section ultérieure montre comment les deux processeurs fonctionnent ensemble via Bridge.
Étapes Rapides
Première utilisation d'Arduino UNO Q ? Suivez le tutoriel Démarrer avec Arduino UNO Q avant de continuer.
- Connectez : Câblez le capteur IR d'obstacles à l'Arduino UNO Q MCU comme indiqué dans le schéma de câblage.
- Ouvrez Arduino App Lab : Lancez Arduino App Lab et attendez qu'il détecte votre Arduino UNO Q.
- Créez une nouvelle App : Cliquez sur le bouton Create New App.
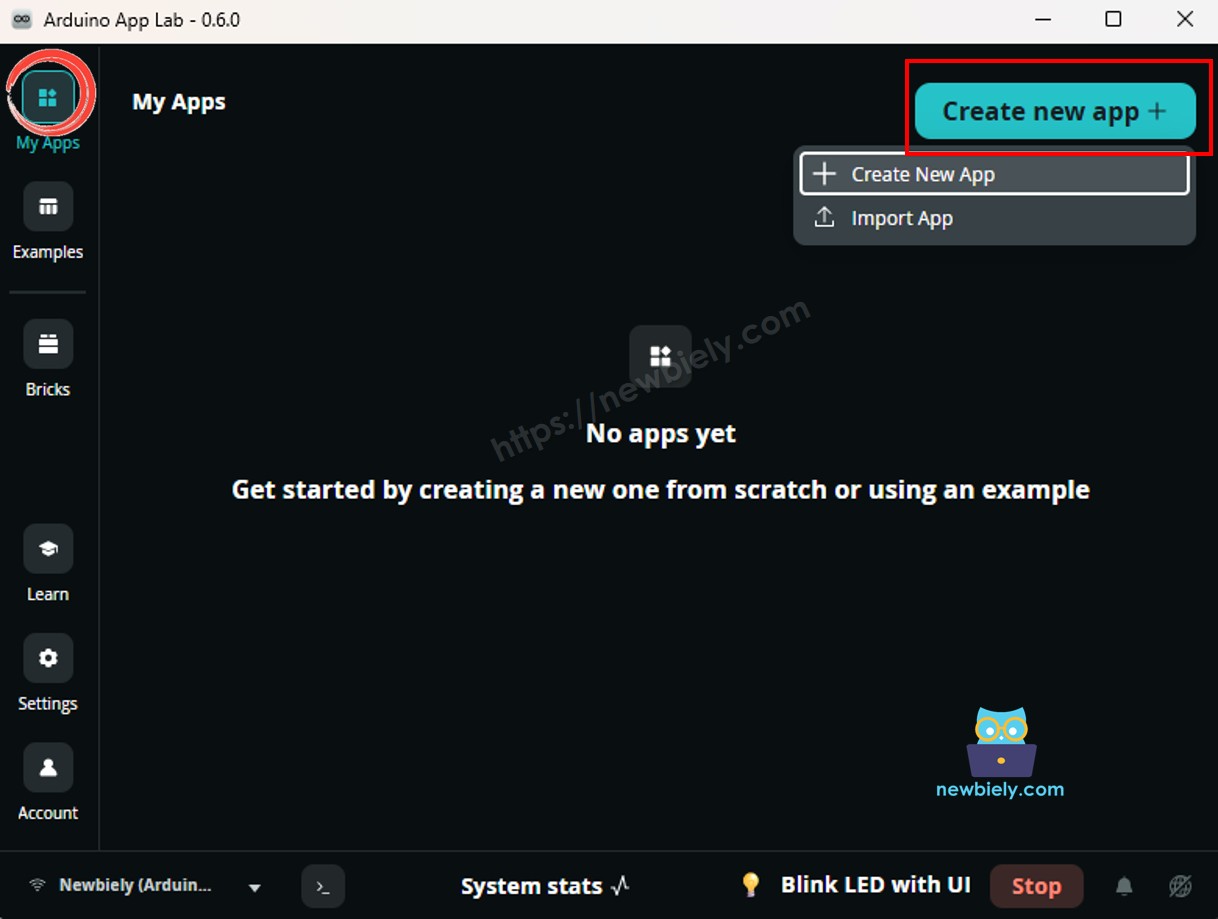
- Donnez un nom à l'App, par exemple : ObstacleSensor
- Cliquez sur Create pour confirmer.
- Collez le sketch : Copiez le code MCU ci-dessus et collez-le dans sketch/sketch.ino.
- Téléversez : Cliquez sur le bouton Run dans Arduino App Lab.
- Placez votre main devant le capteur et observez le Moniteur Série.
- Ajustez le potentiomètre pour modifier la portée de détection.
Sortie de la Console App Lab
Bridge : Linux + MCU
Cette section montre comment programmer les deux processeurs de l'Arduino UNO Q pour que le côté Linux puisse lire l'état des obstacles et recevoir des événements via Bridge :
- Le capteur d'obstacles est connecté au MCU — le MCU lit le capteur toutes les 100 ms
- Le MPU ne peut pas lire la broche du capteur directement — il appelle des fonctions Bridge pour obtenir l'état actuel ou recevoir des événements
- Le MPU dispose du Wi-Fi — exécutant Debian Linux complet, il peut envoyer des alertes Telegram instantanées lorsqu'un obstacle est détecté
- Arduino_RouterBridge permet la communication RPC entre les deux processeurs
- ⚠️ /dev/ttyHS1 (Linux) et Serial1 (MCU) sont RÉSERVÉS par le router — ne les ouvrez jamais dans le code utilisateur
Code MCU (Bridge)
Code Python (Bridge)
Étapes Rapides
- Connectez : Câblez le capteur IR d'obstacles à l'Arduino UNO Q comme indiqué dans le schéma de câblage.
- Ouvrez Arduino App Lab et créez une nouvelle App nommée ObstacleSensorBridge.
- Collez le sketch MCU dans sketch/sketch.ino.
- Collez le code Python dans le fichier Python.
- Install the library: Click the Add sketch library button (the open book icon with a + sign) in the left sidebar.
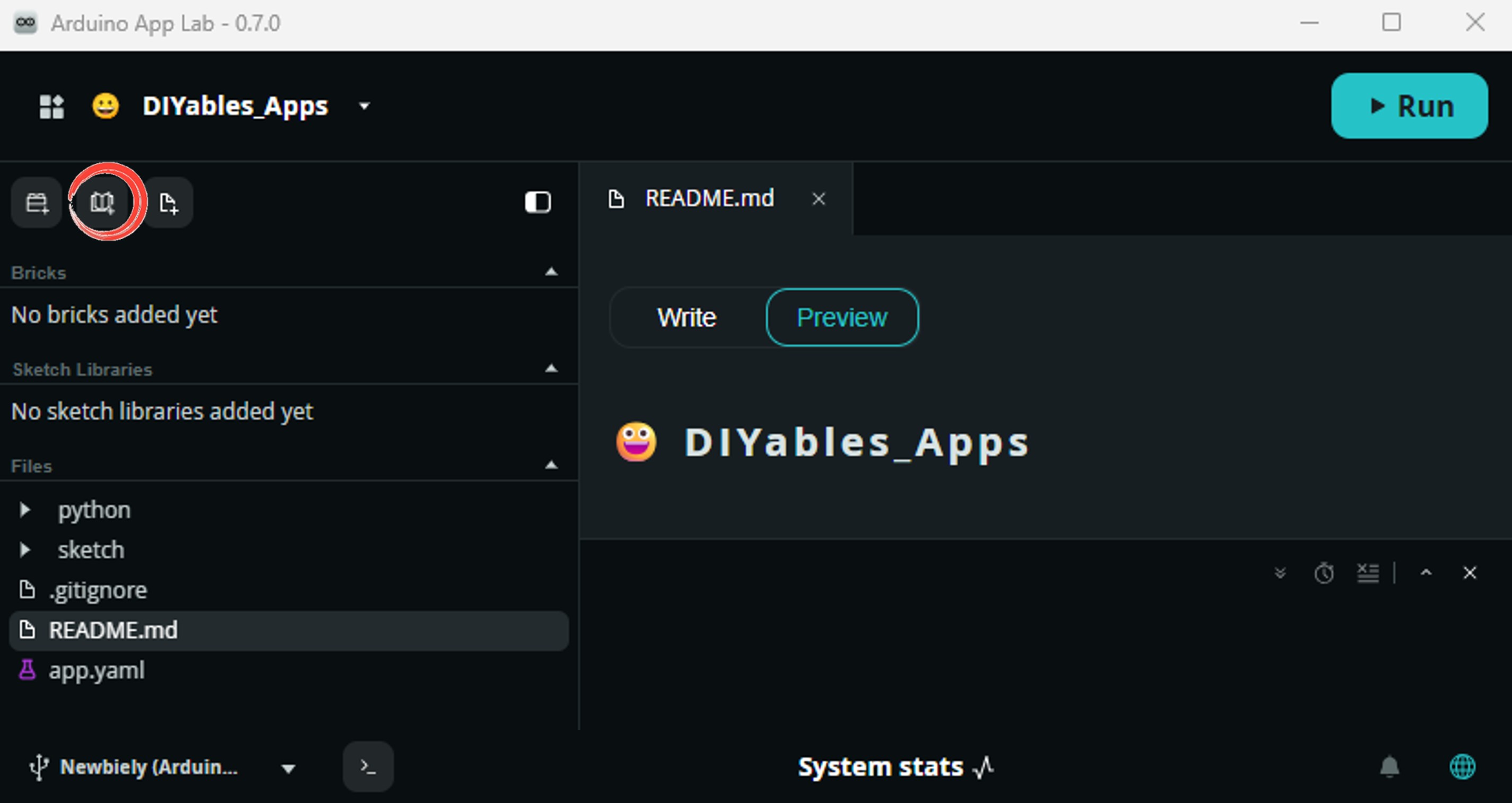
- Search for Arduino_RouterBridge created by Arduino and click the Install button.
- Téléversez : Cliquez sur le bouton Run.
- Placez un objet devant le capteur et observez les deux consoles.
Sortie de la Console App Lab
Telegram
Recevez des alertes Telegram instantanées lorsqu'un obstacle est détecté devant le capteur, et interrogez son état à distance.
Sketch MCU : Conservez le même sketch MCU de la section Bridge précédente.
Code Python (Telegram)
Étapes Rapides
- Remplacez YOUR_TELEGRAM_BOT_TOKEN par votre token de bot réel obtenu depuis BotFather.
- Remplacez YOUR_CHAT_ID par votre identifiant de chat Telegram.
- Collez ce code Python dans le fichier Python de votre App (conservez le même sketch MCU).
- Cliquez sur le bouton Run — placez un objet devant le capteur pour déclencher l'alerte Telegram.
Sortie de la Console App Lab

ArduinoBot
Intégration d'OpenClaw
Vous pouvez adapter OpenClaw à ce tutoriel en vous référant aux instructions du tutoriel Arduino UNO Q - OpenClaw.
Idées de Projets
Vous pouvez construire de nombreux projets utiles avec le capteur IR d'évitement d'obstacles et Arduino UNO Q :
- Compteur de visiteurs d'entrée : Montez le capteur à une entrée — chaque fois qu'un obstacle (personne) franchit, le compteur d'événements s'incrémente ; le MPU envoie un résumé Telegram avec le comptage journalier quand vous envoyez /count
- Notificateur de livraison de colis : Placez le capteur face à une boîte aux lettres ou une zone de livraison — quand un colis est déposé et détecté, Python envoie une alerte Telegram "Colis livré !" à votre téléphone
- Arrêt d'obstacle pour robot : Connectez le capteur à un robot motorisé — quand le MCU détecte un obstacle, il arrête les moteurs immédiatement ; le MPU envoie une notification Telegram avec l'heure de l'événement
- Déclenchement de portail automatique : Utilisez le capteur pour détecter un véhicule approchant — quand un obstacle est détecté pendant plus de 200 ms, le MCU déclenche un relais pour ouvrir un portail, et Python envoie une entrée de journal Telegram
- Compteur de pièces industrielles : Montez le capteur sur un convoyeur d'assemblage — comptez combien de pièces passent par minute et envoyez le comptage à Telegram toutes les 5 minutes avec un minuteur Python
Défiez-vous
Prêt à aller plus loin avec le capteur IR d'évitement d'obstacles sur Arduino UNO Q ? Essayez ces défis :
- Facile : Ajoutez une commande Telegram /count qui retourne combien d'événements de détection d'obstacles se sont produits depuis le démarrage du programme, suivis comme un compteur dans le code Python.
- Moyen : Implémentez un filtre anti-rebond : un obstacle doit être continuellement détecté pendant au moins 300 ms avant que l'événement soit enregistré et que l'alerte Telegram soit envoyée — cela élimine les faux déclenchements dus aux vibrations ou aux réflexions instables.
- Avancé : Construisez un compteur de personnes bidirectionnel : utilisez deux capteurs IR d'obstacles espacés de quelques centimètres à une entrée — déterminez la direction d'entrée ou de sortie selon quel capteur se déclenche en premier, et envoyez une mise à jour Telegram avec le comptage d'occupation actuel.