Arduino UNO Q - Capteur d'Inclinaison SW520D
Un capteur d'inclinaison SW520D détecte les changements d'orientation et génère un signal numérique. Il utilise un simple mécanisme d'interrupteur à bille — sans potentiomètre ni sortie analogique. Utilisez-le pour déclencher des actions lorsqu'un objet est incliné, renversé ou déplacé. Avec Bridge et Telegram, votre Arduino UNO Q peut vous envoyer des alertes instantanées lorsqu'une inclinaison est détectée.
Dans ce tutoriel, vous apprendrez :
- Ce qu'est un capteur d'inclinaison SW520D et comment il fonctionne
- Comment câbler le capteur d'inclinaison SW520D au MCU de l'Arduino UNO Q
- Comment lire la sortie numérique pour détecter l'inclinaison
- Comment utiliser Bridge pour exposer l'état et les événements d'inclinaison au côté Linux (Python)
- Comment recevoir des alertes Telegram lorsqu'une inclinaison est détectée sur l'Arduino UNO Q
- Comment utiliser OpenClaw sur l'Arduino UNO Q avec le capteur d'inclinaison SW520D
Matériel Requis
Ou vous pouvez acheter les kits suivants:
| 1 | × | Kit de Capteurs DIYables (18 capteurs/écrans) |
À Propos du Capteur d'Inclinaison SW520D
Un module capteur d'inclinaison SW520D détecte les changements d'orientation à l'aide d'une petite bille métallique à l'intérieur d'un boîtier cylindrique. Lorsque le capteur est vertical, la bille ferme le contact électrique. Lorsque le capteur est incliné, la bille roule et ouvre le contact. Le module génère un signal numérique simple :
- HIGH : Le capteur est vertical — aucune inclinaison détectée
- LOW : Le capteur est incliné — inclinaison détectée
Le module comprend :
- Broche VCC : Alimentation 3,3V à 5V
- Broche GND : Masse
- Broche DO : Sortie numérique — HIGH = vertical, LOW = inclinaison détectée
- LED PWR : Indicateur d'alimentation
- LED Status : Reflète l'état d'inclinaison — allumée quand vertical, éteinte quand incliné
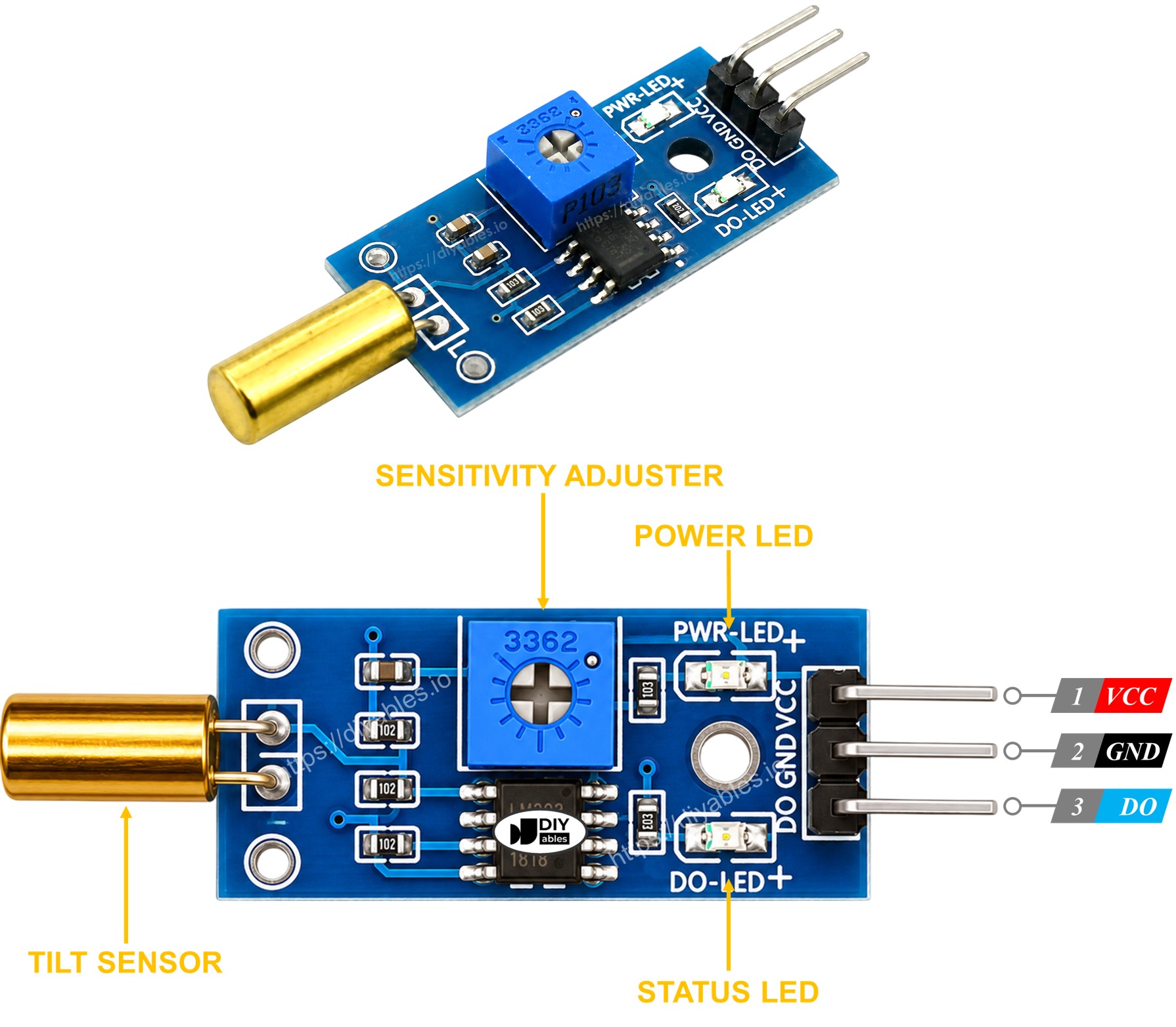
Schéma de Câblage
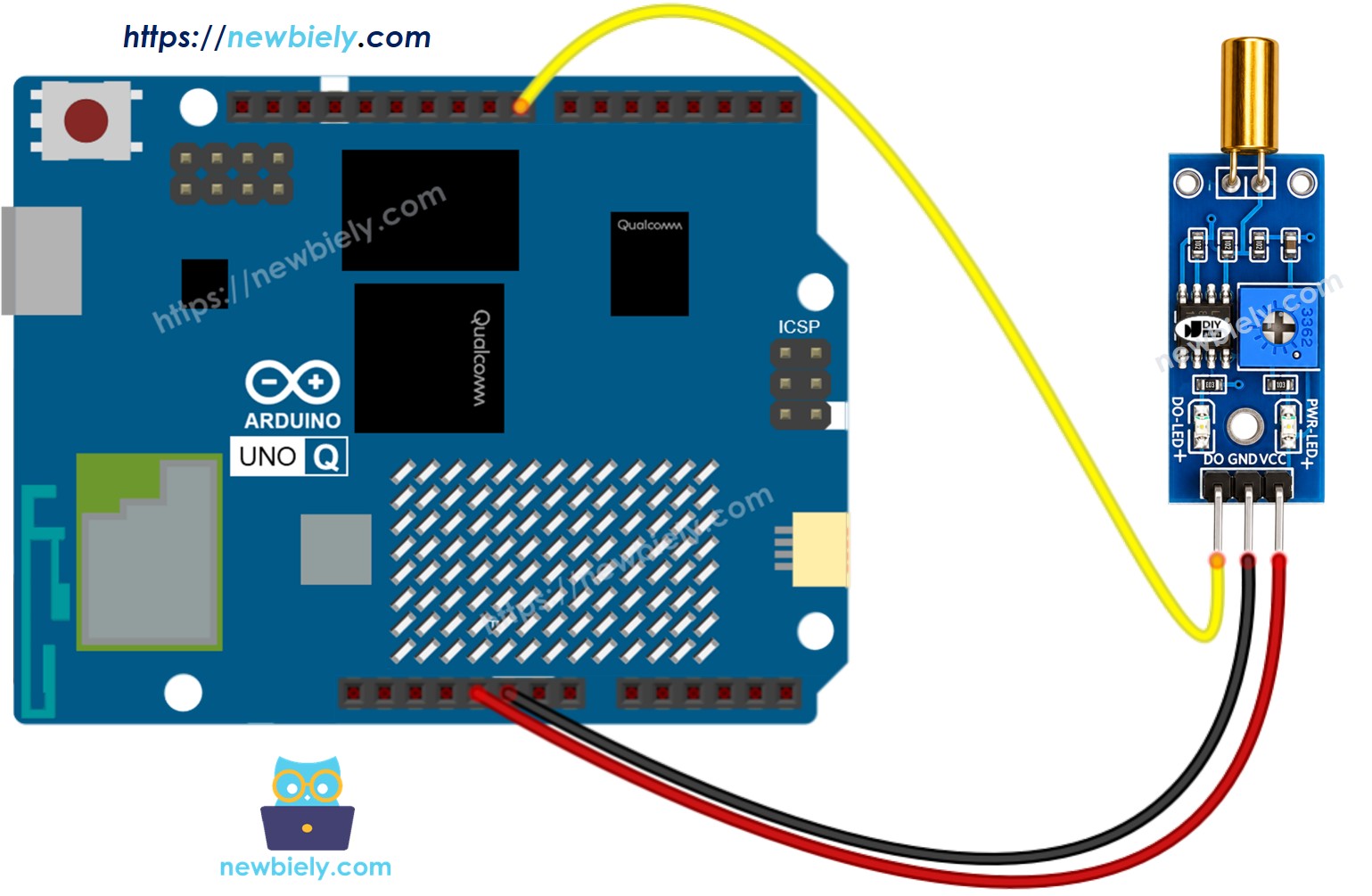
Cette image a été créée avec Fritzing. Cliquez pour agrandir l'image.
| Broche Capteur d'Inclinaison SW520D | MCU Arduino UNO Q |
|---|---|
| GND | GND |
| VCC | 5V |
| DO | D8 |
Comment Programmer pour le Capteur d'Inclinaison SW520D
- Configurer la broche du capteur comme entrée numérique :
- Lire la sortie numérique :
- Détecter les événements d'inclinaison en comparant à l'état précédent :
Code Arduino UNO Q
L'Arduino UNO Q possède deux processeurs fonctionnant ensemble :
- Le MCU STM32 lit la sortie numérique du capteur d'inclinaison SW520D et détecte les événements d'inclinaison
- Le MPU Qualcomm exécute Debian Linux avec Wi-Fi — dans cette section, seul le MCU est programmé. Une section ultérieure montre comment les deux processeurs fonctionnent ensemble via Bridge.
Étapes Rapides
Première utilisation d'Arduino UNO Q ? Suivez le tutoriel Démarrer avec Arduino UNO Q avant de continuer.
- Connecter : Câblez le capteur d'inclinaison SW520D à l'Arduino UNO Q MCU comme indiqué dans le schéma de câblage.
- Ouvrir Arduino App Lab : Lancez Arduino App Lab et attendez qu'il détecte votre Arduino UNO Q.
- Créer une nouvelle application : Cliquez sur le bouton Créer une nouvelle application.
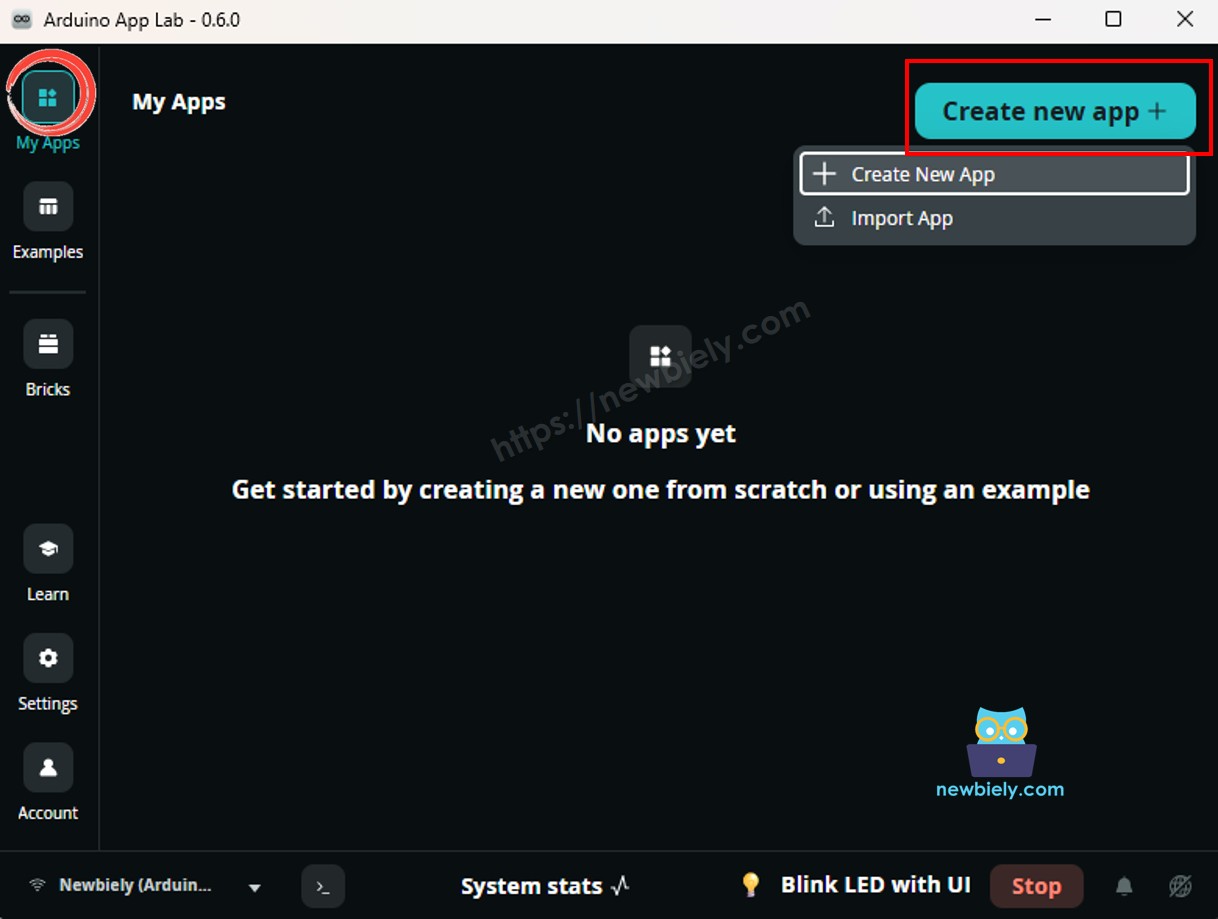
- Donnez un nom à l'application, par exemple : SW520DTiltSensor
- Cliquez sur Créer pour confirmer.
- Coller le sketch : Copiez le code MCU ci-dessus et collez-le dans sketch/sketch.ino.
- Téléverser : Cliquez sur le bouton Exécuter dans Arduino App Lab.
- Inclinez le capteur dans les deux sens — observez la sortie du Moniteur Série.
- Assurez-vous que le capteur est monté dans la bonne position verticale pour une détection fiable.
Sortie de la Console App Lab
Bridge : Linux + MCU
Cette section montre comment programmer les deux processeurs de l'Arduino UNO Q pour que le côté Linux puisse lire l'état d'inclinaison et recevoir les événements via Bridge :
- Le capteur d'inclinaison SW520D est connecté au MCU — le MCU surveille en permanence la sortie numérique et met en cache l'état actuel
- Le MPU ne peut pas lire la broche du capteur directement — il appelle les fonctions Bridge pour obtenir l'état actuel ou vérifier les nouveaux événements d'inclinaison
- Le MPU dispose du Wi-Fi — exécutant Debian Linux complet, il peut envoyer des alertes Telegram dès qu'une inclinaison est détectée
- Arduino_RouterBridge permet la communication RPC entre les deux processeurs
- ⚠️ /dev/ttyHS1 (Linux) et Serial1 (MCU) sont RÉSERVÉS par le routeur — ne les ouvrez jamais dans le code utilisateur
En résumé : Le MCU détecte l'inclinaison via la broche DO → définit le drapeau d'événement → le MPU interroge Bridge → le MPU envoie une alerte Telegram.
Code MCU (Bridge)
Code Python (Bridge)
Étapes Rapides
- Connecter : Câblez le capteur d'inclinaison SW520D à l'Arduino UNO Q comme indiqué dans le schéma de câblage.
- Ouvrir Arduino App Lab et créer une nouvelle application nommée TiltSensorBridge.
- Coller le sketch MCU dans sketch/sketch.ino.
- Coller le code Python dans le fichier Python.
- Install the library: Click the Add sketch library button (the open book icon with a + sign) in the left sidebar.
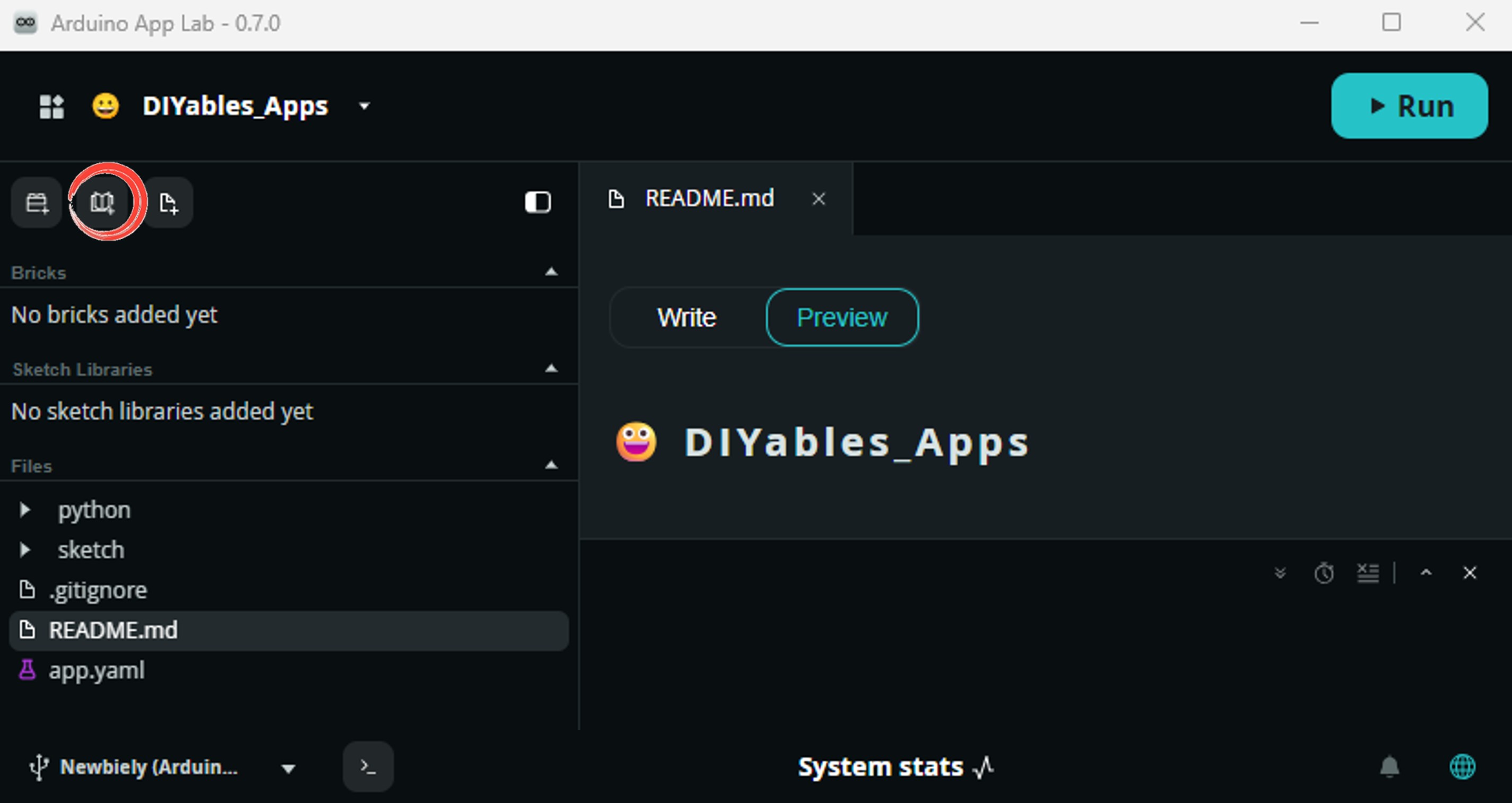
- Search for Arduino_RouterBridge created by Arduino and click the Install button.
- Téléverser : Cliquez sur le bouton Exécuter.
- Inclinez le capteur — observez l'événement apparaître dans les deux consoles.
Sortie de la Console App Lab
Telegram
Recevez des alertes Telegram instantanées lorsqu'une inclinaison est détectée par le capteur d'inclinaison SW520D de l'Arduino UNO Q.
Sketch MCU : Conservez le même sketch MCU de la section Bridge précédente.
Code Python (Telegram)
Étapes Rapides
- Remplacez YOUR_TELEGRAM_BOT_TOKEN par votre vrai token de bot de BotFather.
- Remplacez YOUR_CHAT_ID par votre identifiant de chat Telegram.
- Collez ce code Python dans le fichier Python de votre application (conservez le même sketch MCU).
- Cliquez sur le bouton Exécuter — inclinez le capteur pour déclencher une alerte Telegram.
Sortie de la Console App Lab

ArduinoBot
Intégration d'OpenClaw
Vous pouvez adapter OpenClaw à ce tutoriel en vous référant aux instructions du tutoriel Arduino UNO Q - OpenClaw.
Idées de Projets
Vous pouvez réaliser de nombreux projets utiles avec le capteur d'inclinaison SW520D et l'Arduino UNO Q :
- Alerte Anti-Sabotage : Fixez le capteur sur un boîtier — s'il est incliné ou déplacé, le MPU envoie une alerte Telegram immédiate avec un horodatage pour savoir quand la tentative a eu lieu
- Interrupteur Activé par Inclinaison : Utilisez le capteur d'inclinaison avec un relais via Bridge — Python détecte l'événement d'inclinaison et allume ou éteint une lumière ou un ventilateur selon l'orientation
- Moniteur d'Équipement : Montez le capteur sur une machine ou un meuble — le MPU enregistre chaque événement d'inclinaison dans un fichier CSV sous Linux et envoie un rapport Telegram en fin de journée
- Alerte Coffre-fort Intelligent : Combinez le capteur d'inclinaison avec un capteur de porte — Telegram vous alerte lorsque la porte du coffre s'ouvre ou que le coffre lui-même est déplacé
- Contrôleur d'Inclinaison Télécommandé : Utilisez deux capteurs SW520D montés sur différents axes — le MPU lit les deux états via Bridge et envoie des commandes d'orientation pour contrôler un appareil à distance via Wi-Fi