Arduino UNO Q - Capteur de Mouvement
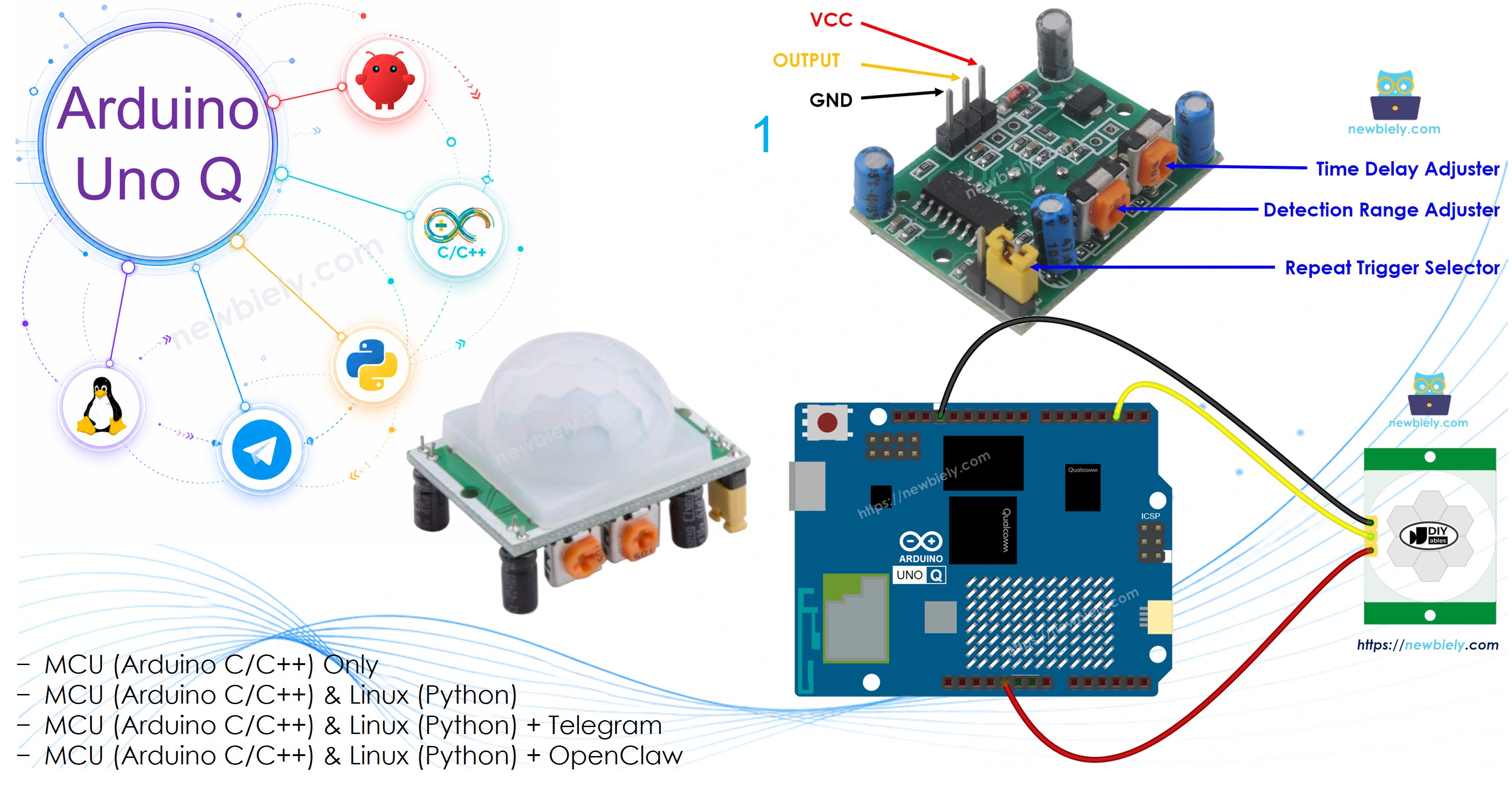
Ce tutoriel vous montre comment utiliser un capteur de mouvement PIR HC-SR501 avec Arduino UNO Q pour détecter le mouvement humain. Vous apprendrez :
- Comment fonctionne le capteur de mouvement HC-SR501
- Comment connecter le capteur de mouvement à Arduino UNO Q
- Comment programmer le MCU pour détecter les événements de début et d'arrêt de mouvement
- Comment utiliser le Bridge pour signaler les événements de mouvement depuis Linux via le Monitor
- Comment recevoir des alertes de mouvement à distance via Telegram
Matériel Requis
Ou vous pouvez acheter les kits suivants:
| 1 | × | Kit de Capteurs DIYables (18 capteurs/écrans) |
À Propos du Capteur de Mouvement HC-SR501
Le capteur PIR HC-SR501 détecte le mouvement humain ou animal. Il est couramment utilisé dans l'automatisation de l'éclairage, le contrôle des portes, les escaliers roulants et la détection d'intrus.
Brochage
Le HC-SR501 possède trois broches :
- Broche GND : Connecter à GND (0V).
- Broche VCC : Connecter à VCC (5V).
- Broche OUTPUT : Envoie LOW en l'absence de mouvement, HIGH lorsque du mouvement est détecté. Connecter à une broche d'entrée numérique du MCU.
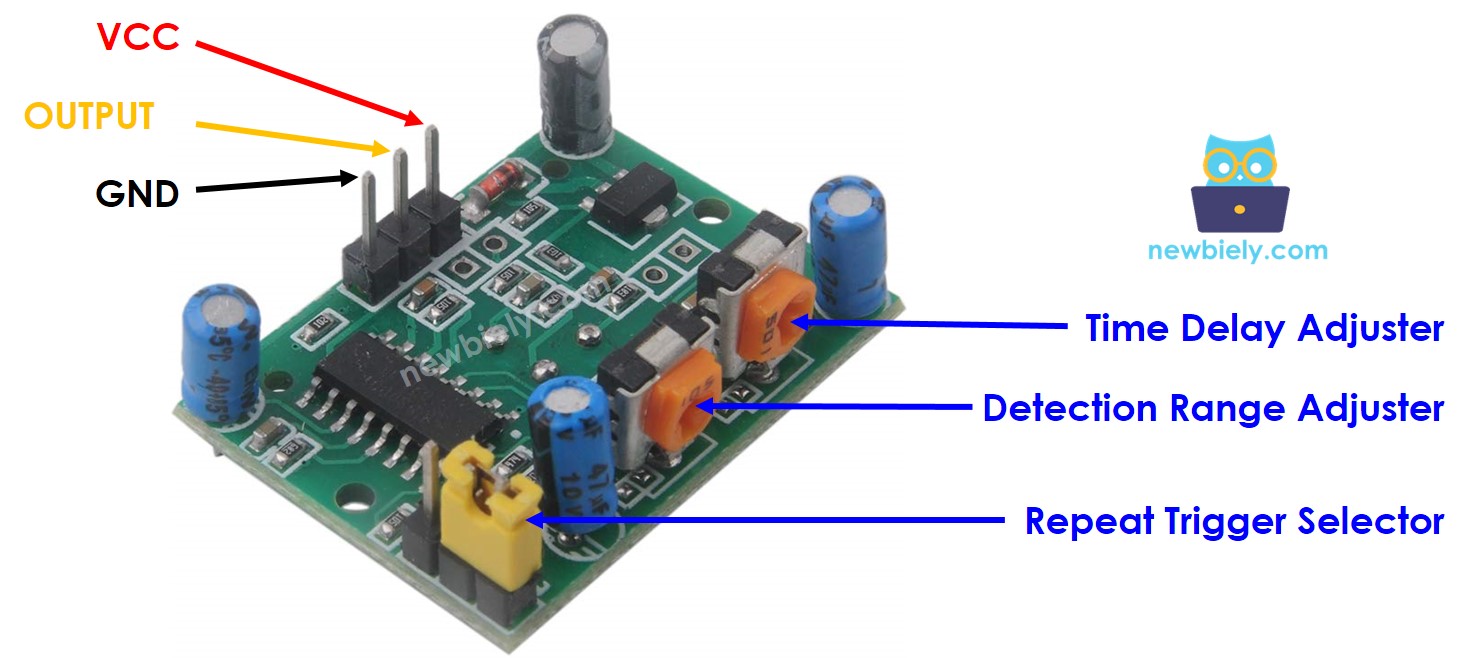
Le capteur possède également un cavalier et deux potentiomètres pour ajuster la sensibilité et le délai. Commencez avec les paramètres par défaut — consultez la section Utilisations Avancées pour les détails.
Fonctionnement
Le HC-SR501 détecte le mouvement en percevant les changements de rayonnement infrarouge. Pour déclencher la détection, un objet doit :
- Être en mouvement
- Émettre de l'énergie infrarouge (les humains et les animaux le font naturellement)
Comportement de la broche OUTPUT :
- Aucun mouvement : OUTPUT est LOW.
- Mouvement détecté : OUTPUT passe de LOW à HIGH.
- Mouvement arrêté : OUTPUT passe de HIGH à LOW.
Réglage Initial du Capteur
| Réglage du délai | Visser entièrement dans le sens antihoraire (délai minimum). |
| Réglage de la portée de détection | Visser entièrement dans le sens horaire (portée maximale). |
| Sélecteur de déclenchement répété | Placer le cavalier en mode déclenchement répétable. |
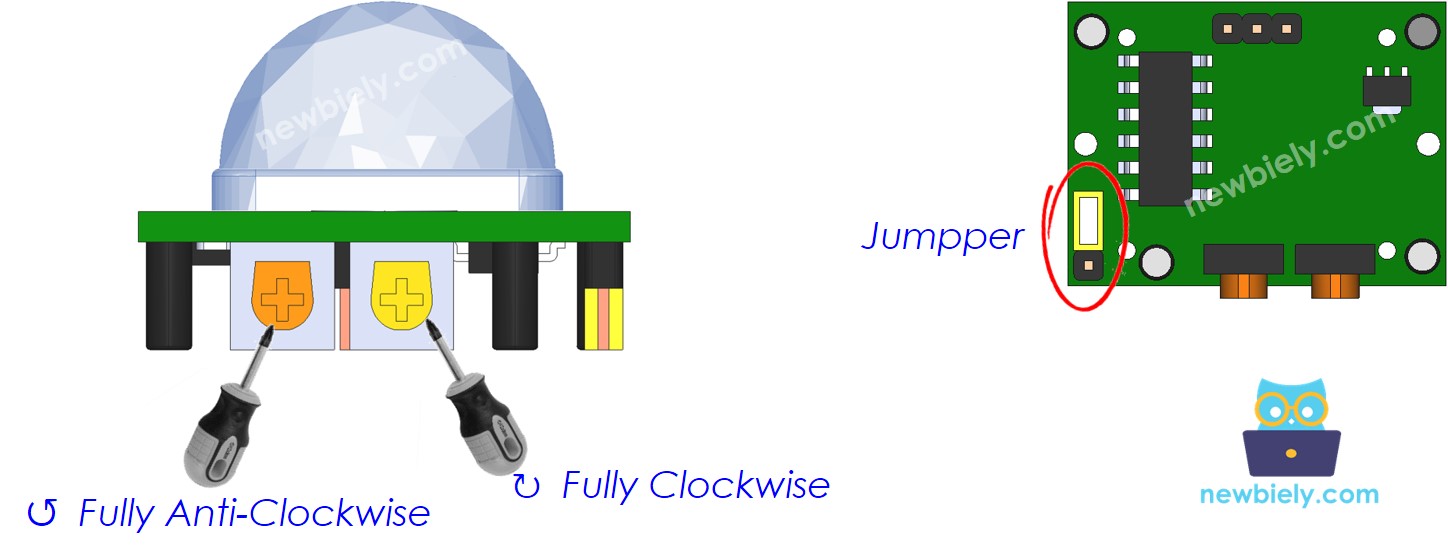
Schéma de Câblage
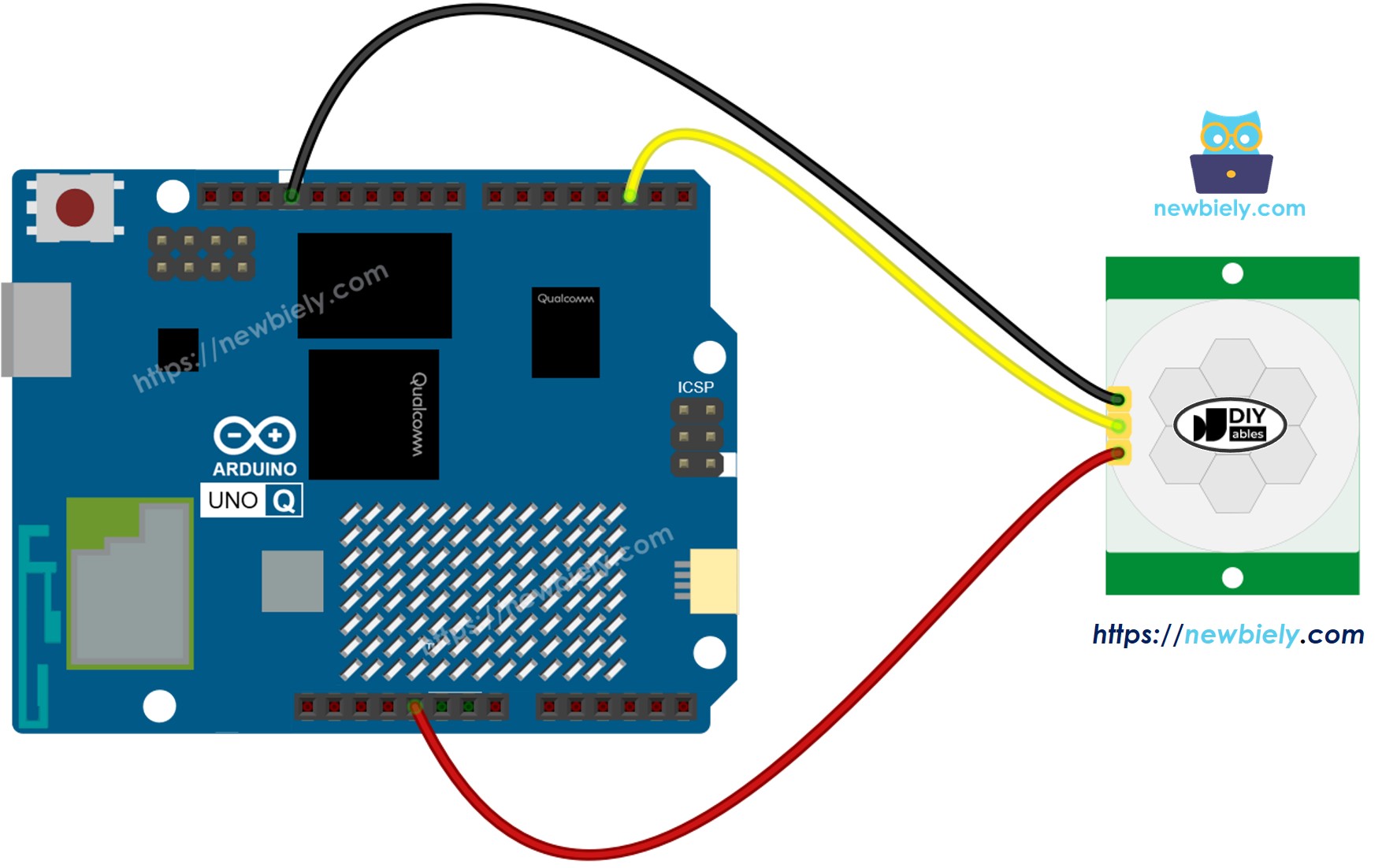
Cette image a été créée avec Fritzing. Cliquez pour agrandir l'image.
Code MCU
L'Arduino UNO Q dispose de deux processeurs : le STM32 MCU (gère le contrôle matériel en temps réel) et le Qualcomm MPU (exécute Debian Linux). Dans cette section, seul le STM32 MCU est programmé — le côté Linux reste inactif. Une section ultérieure montrera comment les deux processeurs fonctionnent ensemble.
Étapes Rapides
- Première utilisation d'Arduino UNO Q ? Suivez le tutoriel Démarrer avec Arduino UNO Q pour préparer votre environnement de développement avant de continuer.
- Câblez les composants : Connectez VCC → 5V, GND → GND, OUTPUT → broche 2.
- Connectez : Branchez l'Arduino UNO Q à votre ordinateur avec un câble USB-C.
- Ouvrez Arduino App Lab : Lancez Arduino App Lab et attendez qu'il détecte votre Arduino UNO Q.
- Créez une nouvelle App : Cliquez sur le bouton Create New App.
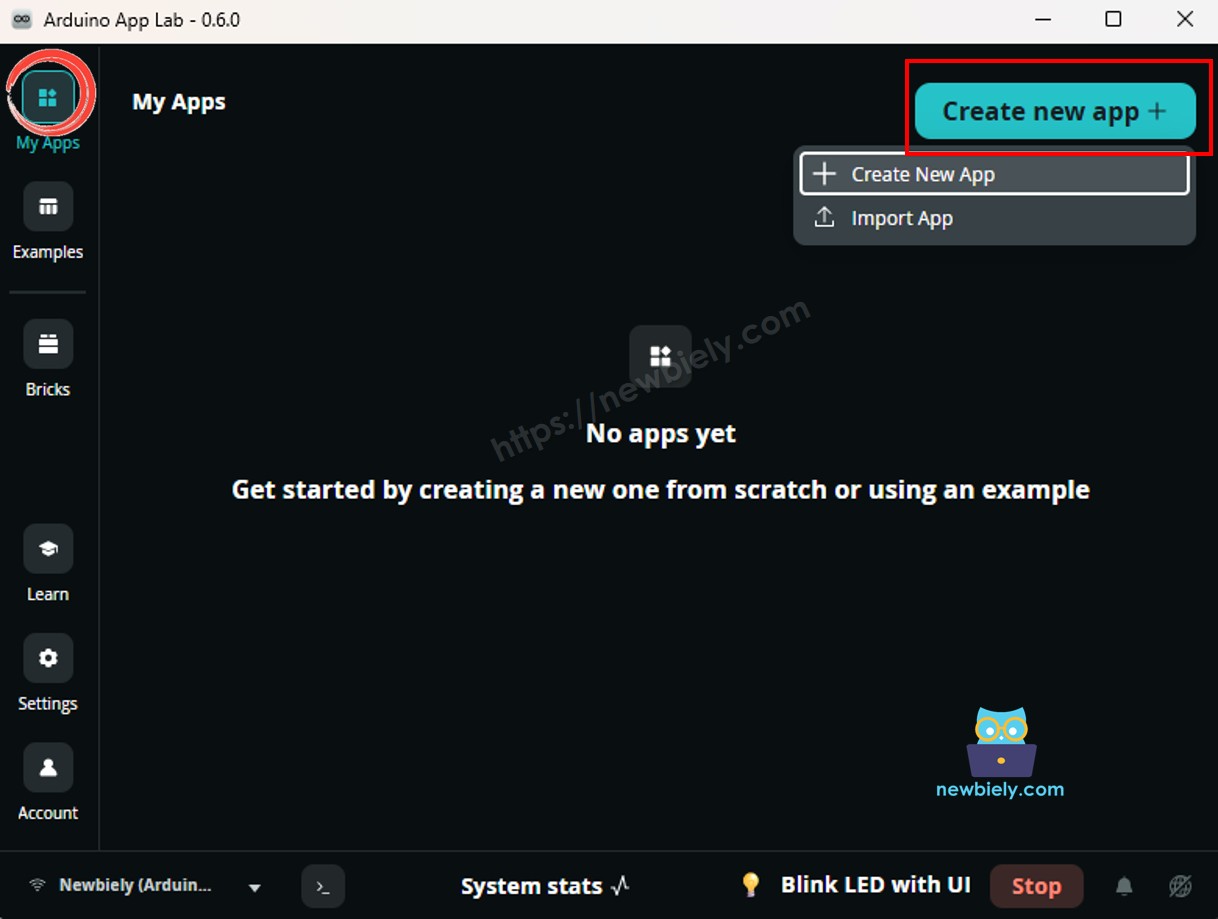
- Donnez un nom à l'App, par exemple : DIYables_MotionSensor
- Cliquez sur Create pour confirmer.
- Vous verrez un ensemble de dossiers et de fichiers générés dans votre nouvelle App.
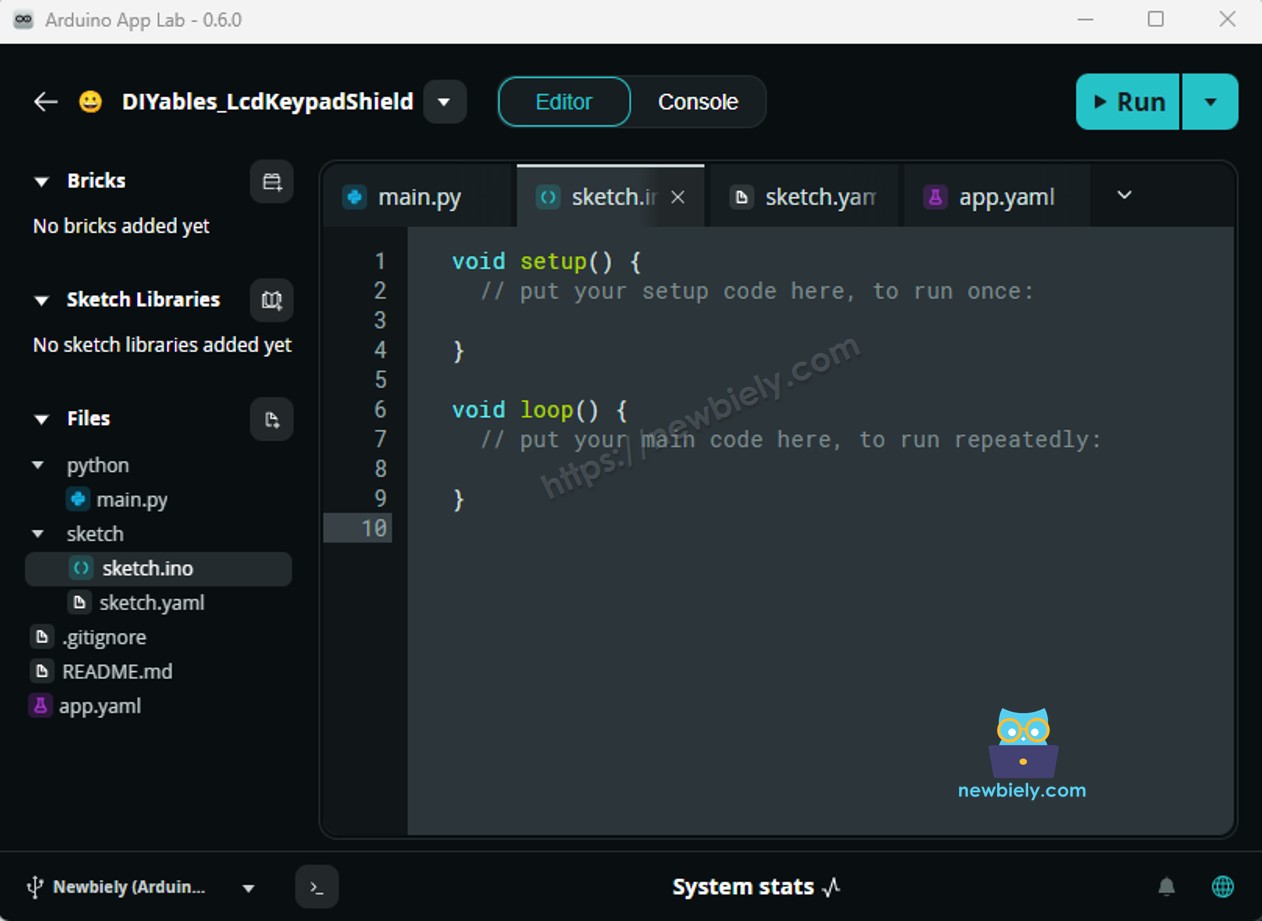
- Trouvez le fichier sketch/sketch.ino — c'est là que vous collerez le sketch MCU.
- Install the library: Click the Add sketch library button (the open book icon with a + sign) in the left sidebar.
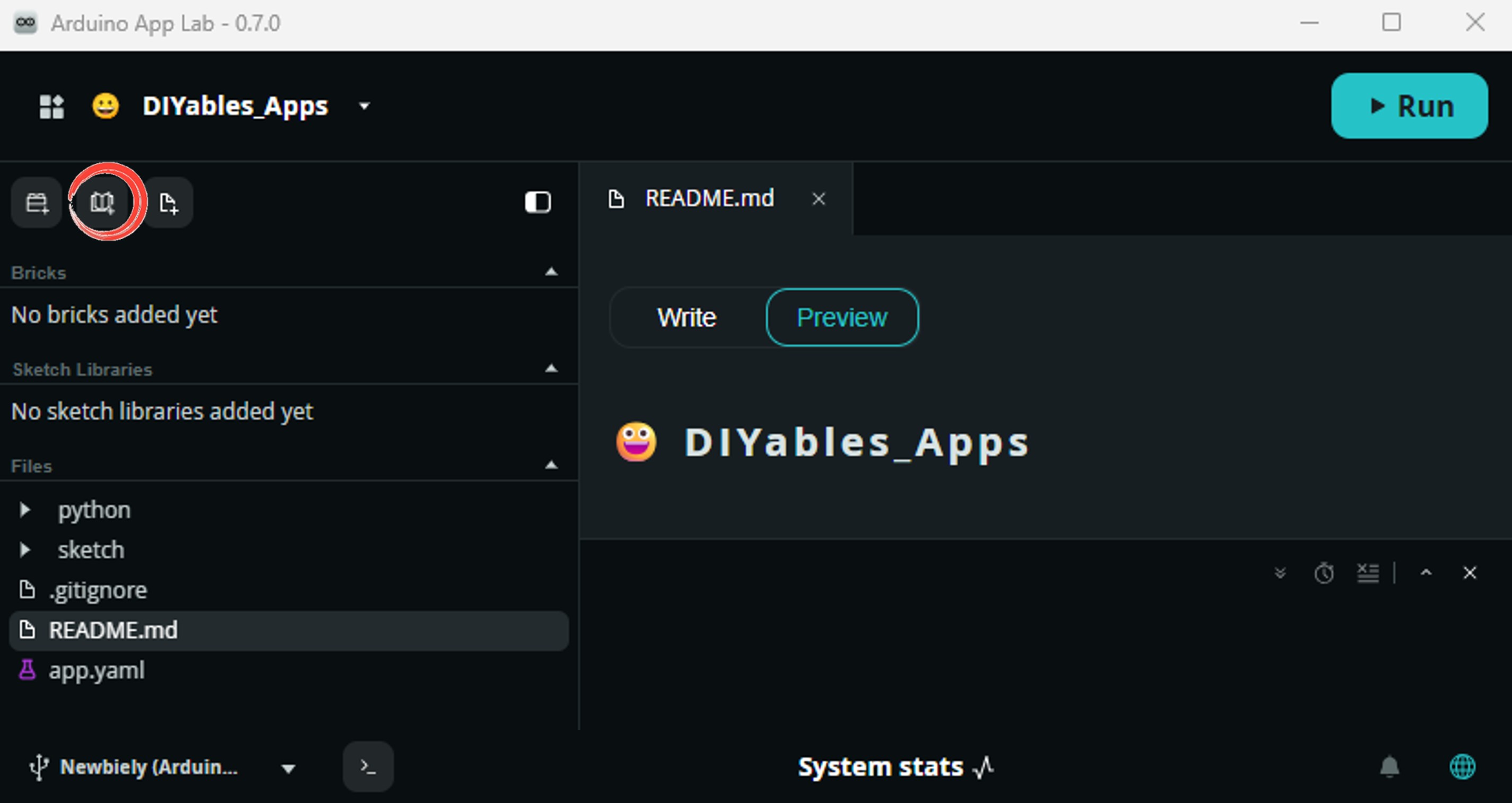
- Search for Arduino_RouterBridge created by Arduino and click the Install button.
- Téléversez : Cliquez sur le bouton Run dans Arduino App Lab pour compiler et téléverser vers le STM32.
- Testez : Marchez devant le capteur. Utilisez la section Bridge ci-dessous pour voir les événements de mouvement dans le Monitor.
Programmation Bridge Linux + MCU
L'Arduino UNO Q dispose de deux processeurs qui fonctionnent ensemble : le MPU (Qualcomm, exécute Debian Linux) et le MCU (STM32, exécute Zephyr OS avec votre sketch Arduino). Ils communiquent via RPC grâce à la bibliothèque Arduino_RouterBridge — jamais via des ports série bruts.
- Le capteur de mouvement est connecté au MCU (STM32) — broche OUTPUT sur la broche 2.
- Le MPU ne peut pas lire le capteur directement — il appelle Bridge.call("check_motion") sur le MCU, qui lit le capteur et signale les transitions de mouvement au Monitor.
- Le MPU dispose du Wi-Fi — parce que le MPU exécute Debian Linux complet avec Wi-Fi, il peut transmettre les alertes de mouvement à Telegram.
- Communication : Bridge.call() côté Linux invoque Bridge.provide() côté MCU (puisque seul digitalRead() est utilisé — aucune écriture matérielle)
- ⚠️ Réservé : /dev/ttyHS1 (Linux) et Serial1 (MCU) sont utilisés par l'Arduino Router — ne les ouvrez jamais directement
En bref : Le MPU interroge le capteur → le MCU lit la broche et signale les transitions → le Monitor affiche les événements de mouvement.
Sketch MCU — détection de mouvement avec Bridge :
Script Python (Arduino App Lab) — interroge les événements de mouvement toutes les 0,5 secondes :
- Remarque : Assurez-vous que Bridge.begin() est appelé dans le sketch MCU et que le sketch est téléversé avant d'exécuter le script Python côté Linux.
- ⚠️ Avertissement : N'ouvrez jamais directement /dev/ttyHS1 (sur Linux) ni n'utilisez Serial1 (sur MCU) dans votre code — ils sont réservés par l'Arduino Router et y accéder cassera le Bridge.
Étapes Rapides
- Téléversez le sketch MCU : Ouvrez Arduino App Lab, créez une nouvelle App, collez le sketch Bridge MCU dans sketch/sketch.ino, installez la bibliothèque Arduino_RouterBridge, et cliquez sur Run.
- Ajoutez le script Python : Collez le code Python ci-dessus dans l'onglet Python de la même App.
- Exécutez l'App : Cliquez sur Run — Python interroge le capteur de mouvement toutes les 0,5 secondes.
- Vérifiez la console : Ouvrez l'onglet Console → sous-onglet MCU Monitor et marchez devant le capteur.
Sortie de la Console App Lab
Intégration Telegram
Recevez des alertes de mouvement via Telegram.
Si vous n'avez pas encore de bot Telegram, consultez Arduino UNO Q - Bot Telegram pour obtenir votre token de bot avant de continuer.
Sketch MCU : Conservez le même sketch MCU de la section Bridge précédente — aucune modification nécessaire. Assurez-vous qu'il est déjà téléversé et en cours d'exécution sur le STM32 avant de continuer.
Script Python (Arduino App Lab) — bot Telegram pour la détection de mouvement :
- Remarque : Remplacez YOUR_BOT_TOKEN par le token obtenu depuis @BotFather sur Telegram.
- Envoyez /status pour déclencher une vérification manuelle de l'état du capteur de mouvement.
Étapes Rapides
- Téléversez le sketch MCU : Utilisez le sketch Bridge MCU de la section précédente (téléversez-le d'abord si ce n'est pas déjà fait).
- Collez le script Telegram : Copiez le code Python ci-dessus dans l'onglet Python de votre App dans Arduino App Lab.
- Définissez votre token : Remplacez YOUR_BOT_TOKEN dans le script par votre token de bot réel.
- Exécutez l'App : Cliquez sur Run — le bot commence à écouter les messages Telegram.
- Testez : Envoyez /status — le bot répond avec l'état du mouvement actuel.
Sortie de la Console App Lab

ArduinoBot
Intégration d'OpenClaw
Vous pouvez adapter OpenClaw à ce tutoriel en vous référant aux instructions du tutoriel Arduino UNO Q - OpenClaw.
Utilisations Avancées
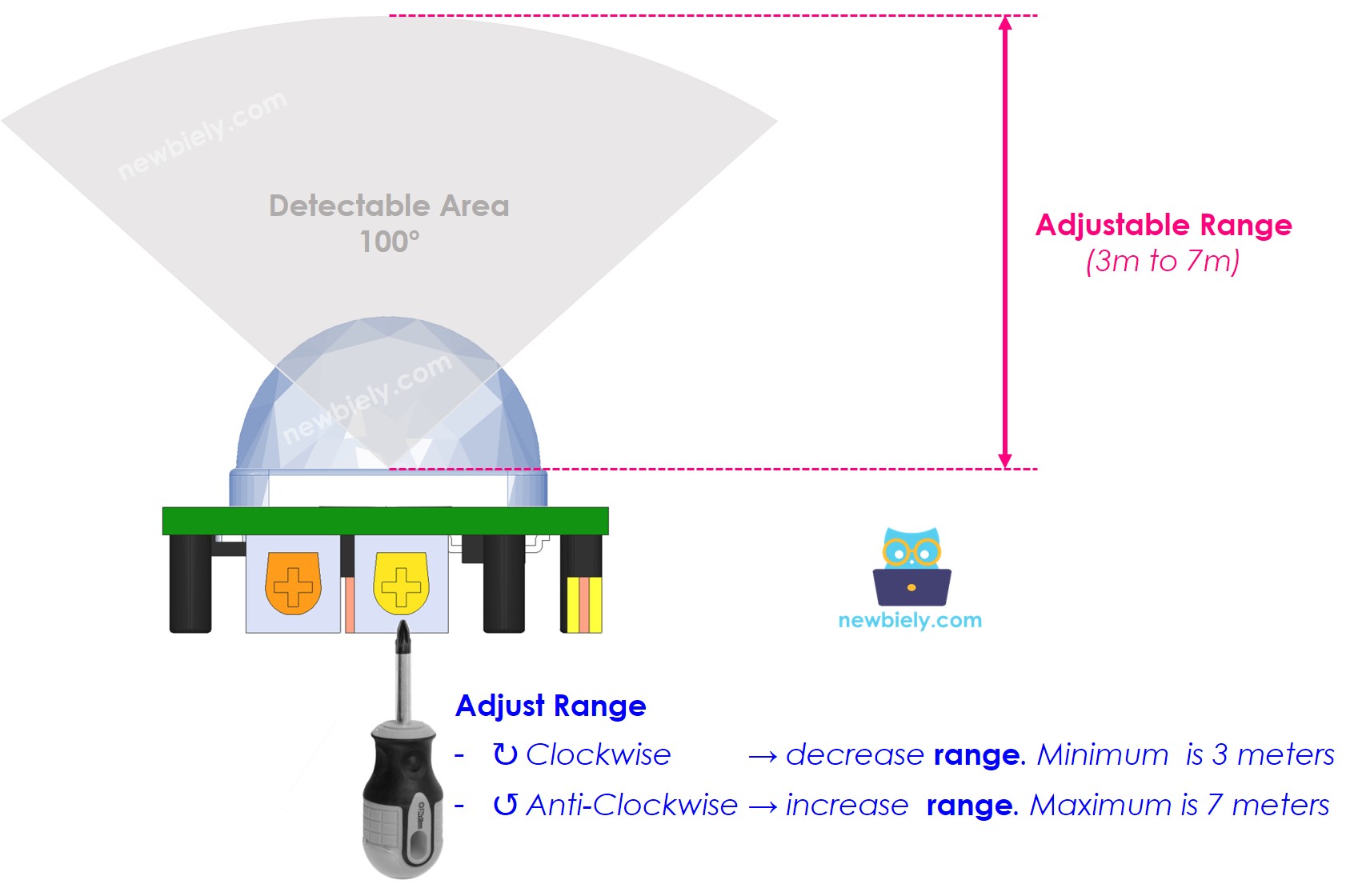
Réglage de la Portée de Détection
Ajuste la distance de détection (environ 3 à 7 mètres) :
- Complètement dans le sens horaire → ~3 mètres.
- Complètement dans le sens antihoraire → ~7 mètres.
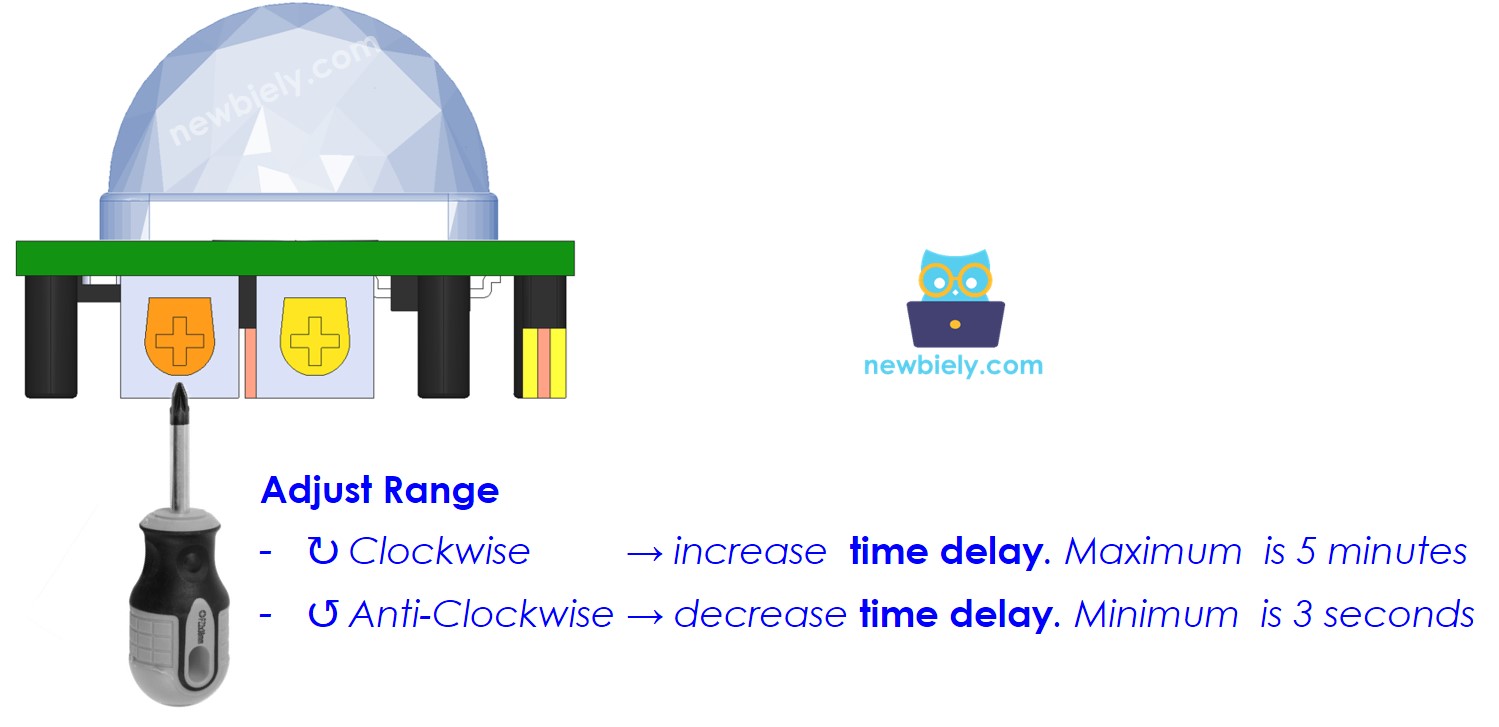
Réglage du Délai
Ajuste le temps de maintien après l'arrêt du mouvement :
- Complètement dans le sens horaire → ~5 minutes.
- Complètement dans le sens antihoraire → ~3 secondes.
Sélecteur de Mode de Déclenchement
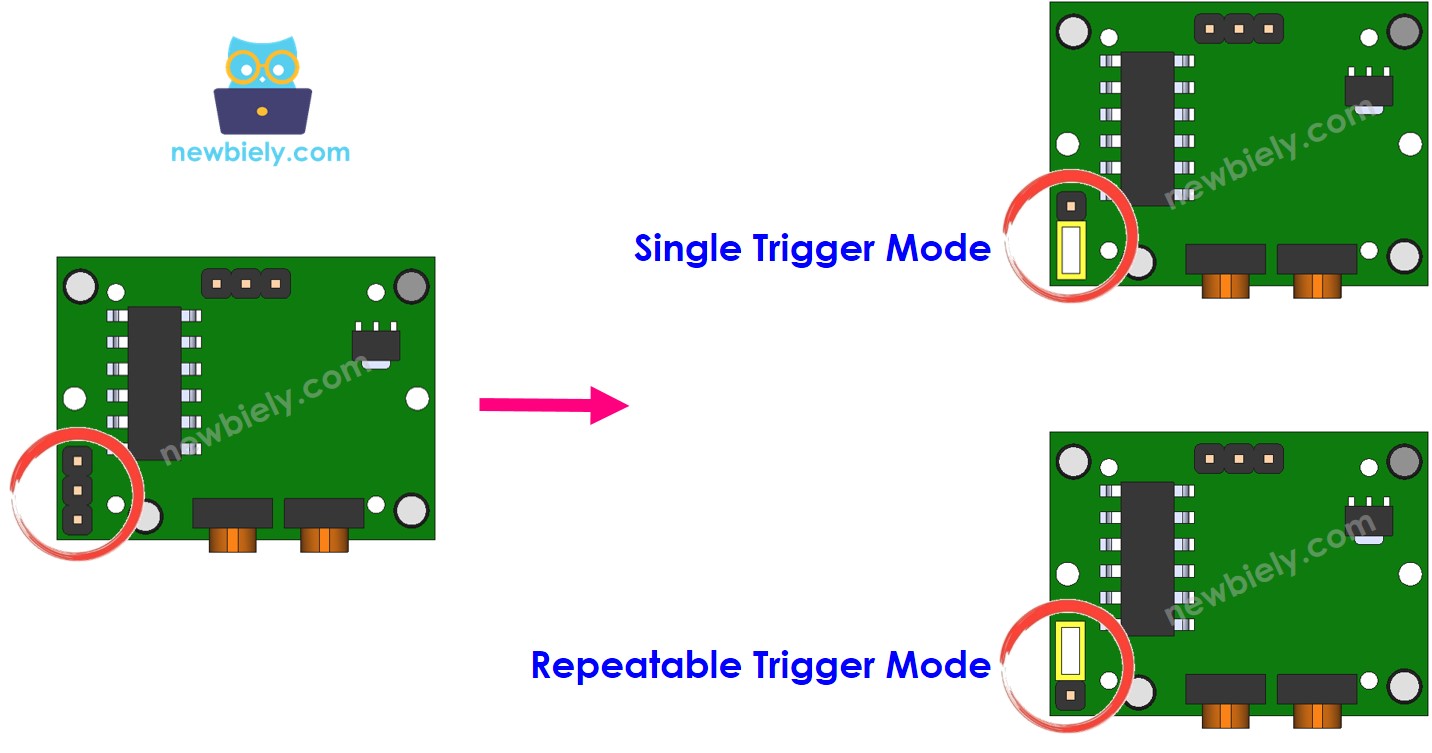
- Mode déclenchement unique : OUTPUT passe à HIGH pendant time_delay, puis LOW pendant 3 secondes, en se répétant tant que le mouvement continue.
- Mode déclenchement répétable : OUTPUT reste HIGH pendant toute la durée du mouvement plus time_delay. Recommandé pour la plupart des applications.
※ Note:
Utilisez le mode déclenchement répétable pour la plupart des applications. En pratique :
- Les appareils s'allument lorsqu'une personne est détectée.
- Les appareils s'éteignent après un délai une fois la personne partie.
Idées d'Applications/Projets
- Éclairage intelligent : Allumez les lumières quand quelqu'un entre dans une pièce, éteignez-les après son départ
- Alerte de sécurité : Envoyez un message Telegram chaque fois que du mouvement est détecté
- Compteur d'occupation : Comptez combien de fois le mouvement démarre par heure
- Économie d'énergie : Éteignez les appareils après une période sans mouvement détecté
Défiez-vous
- Facile : Faites clignoter une LED trois fois chaque fois que du mouvement est détecté
- Moyen : Enregistrez les événements de mouvement avec des horodatages dans un fichier sur le MPU
- Avancé : Envoyez automatiquement une notification Telegram (sans avoir besoin de /status) chaque fois que du mouvement est détecté