Raspberry Pi - Capteur de Couleur TCS3200D/TCS230
Ce guide complet vous montre comment connecter le capteur de couleur TCS3200D/TCS230 au Raspberry Pi pour une mesure de couleur précise et l'extraction de valeurs RVB. Maîtrisez les procédures de calibration et développez des capacités de reconnaissance des couleurs dans vos projets.
Objectifs d'apprentissage :
- Établir les connexions entre TCS3200D/TCS230 et Raspberry Pi
- Exécuter la calibration du capteur pour éliminer le bruit environnemental
- Développer des programmes Raspberry Pi pour la mesure de couleur RVB
Matériel Requis
Ou vous pouvez acheter les kits suivants:
| 1 | × | Kit de Capteurs DIYables (18 capteurs/écrans) |
À Propos du Capteur de Couleur TCS3200D/TCS230
Le capteur TCS3200D/TCS230 utilise une matrice de photodiodes disposées en grille 8×8 pour la détection des couleurs par filtrage optique. Dans ce réseau de 64 éléments, 16 photodiodes comportent des filtres spectraux rouges, 16 autres utilisent des filtres verts, 16 emploient des filtres bleus, et les 16 restantes fonctionnent sans filtres (réponse claire). La mesure des couleurs se fait en activant des ensembles de filtres spécifiques et en analysant la sortie en onde carrée modulée en fréquence.
Les tableaux de LED blanches intégrés sur les modules typiques fournissent un éclairage constant aux cibles, maintenant la stabilité des lectures indépendamment des variations d'éclairage externe et améliorant les performances dans les environnements peu éclairés.
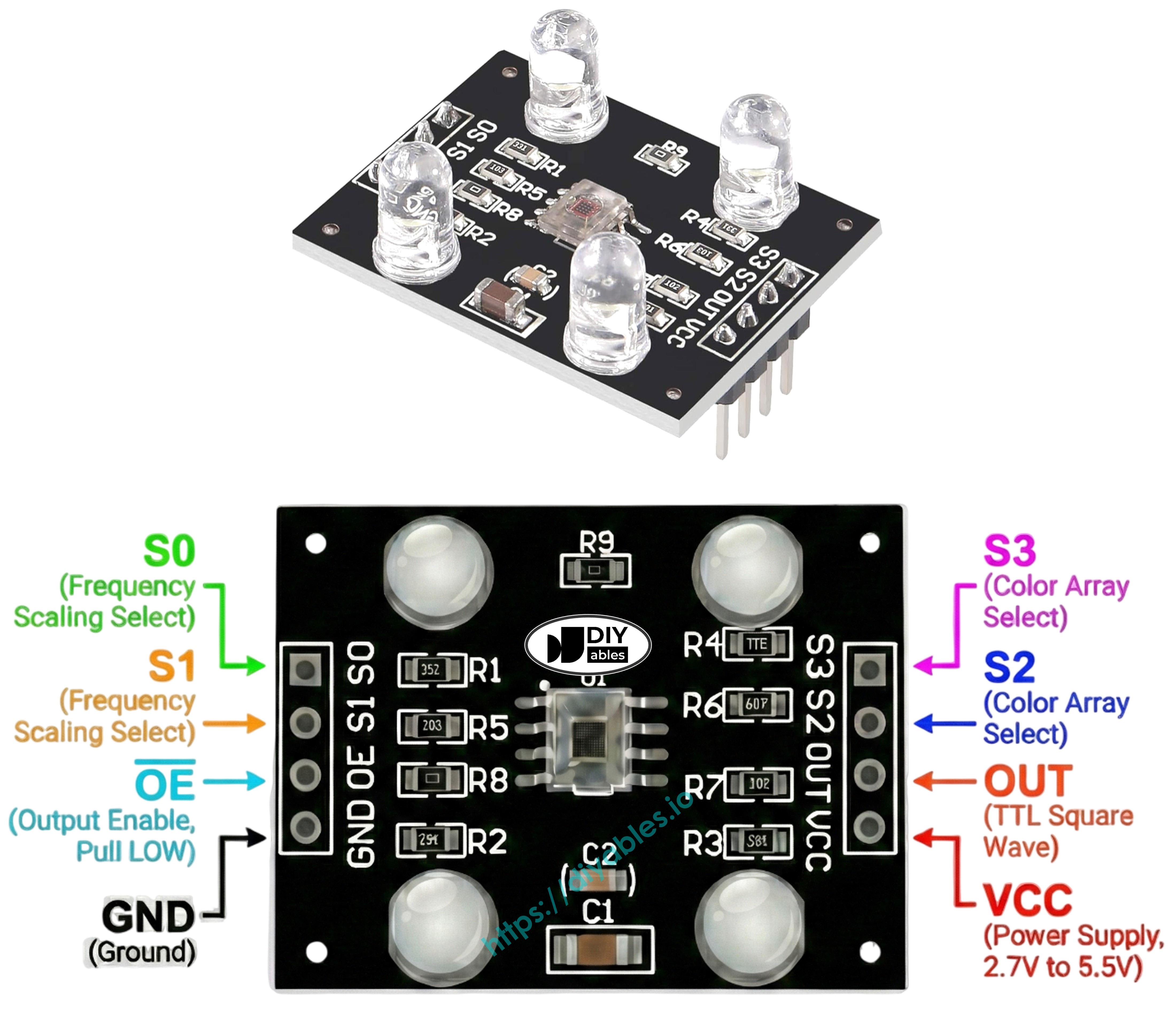
Brochage
Connexions disponibles sur la carte capteur TCS3200D/TCS230 :
- Broche VCC : Entrée de tension d'alimentation (+5V).
- Broche GND : Référence de masse (0V).
- Broches S0, S1 : Sélecteurs de mise à l'échelle de fréquence de sortie.
- Broches S2, S3 : Sélecteurs de filtre de canal de couleur.
- Broche OUT : Sortie en onde carrée modulée en fréquence.
- Broche OE : Entrée d'activation de sortie (s'active quand LOW). Les modules standard câblent généralement cela à GND en interne. Si non connecté, câblez manuellement à GND.
Comment Ça Fonctionne
Deux paramètres critiques contrôlent le comportement du capteur : quel canal de couleur activer et quelle intensité de signal de sortie générer. Deux paires d'entrées de contrôle gèrent ces fonctions :
Contrôle de la mise à l'échelle de fréquence (broches S0 et S1) :
- S0=LOW, S1=LOW : État d'arrêt
- S0=LOW, S1=HIGH : Facteur de mise à l'échelle 2%
- S0=HIGH, S1=LOW : Facteur de mise à l'échelle 20%
- S0=HIGH, S1=HIGH : Facteur de mise à l'échelle 100% (pleine vitesse)
Sélection du canal de couleur (broches S2 et S3) :
- S2=LOW, S3=LOW : Photodiodes rouges actives
- S2=LOW, S3=HIGH : Photodiodes bleues actives
- S2=HIGH, S3=LOW : Photodiodes claires actives (sans filtre)
- S2=HIGH, S3=HIGH : Photodiodes vertes actives
La broche OUT délivre des fréquences en onde carrée allant d'environ 2 Hz à 500 kHz. La fréquence augmente avec l'intensité lumineuse — une illumination plus brillante produit une sortie à fréquence plus élevée. En mesurant la durée d'impulsion (qui est inversement corrélée — des durées plus courtes indiquent une lumière plus forte), nous pouvons traduire ces mesures au format RVB standard 0-255 par calibration.
Atteindre une Précision Optimale
- Gardez le capteur positionné à 1-3 cm de la cible de mesure avec un alignement angulaire stable.
- Utilisez l'éclairage LED blanc intégré pour un éclairage répétable.
- Protégez le capteur de la lumière ambiante variable pour améliorer la cohérence des mesures.
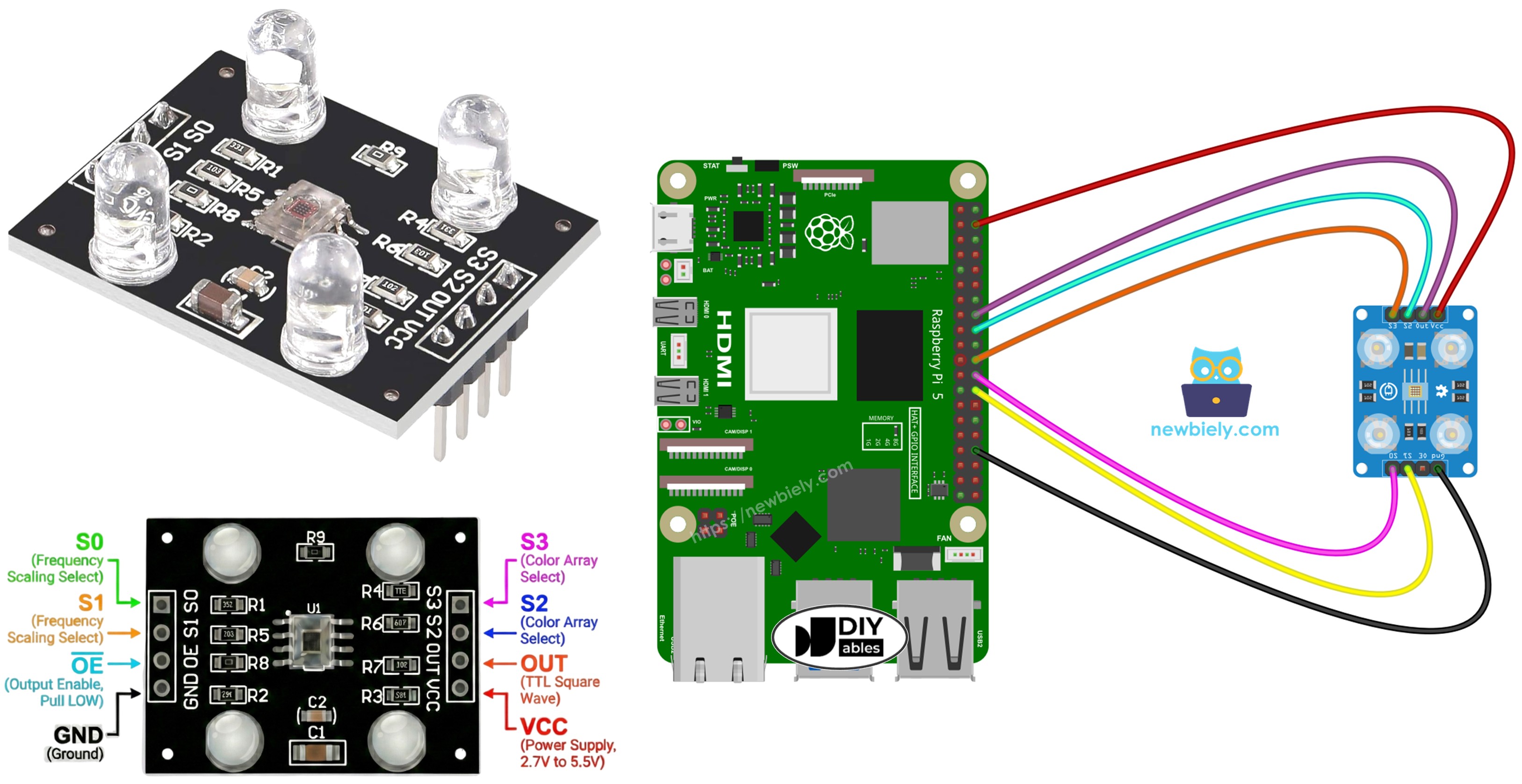
Schéma de Câblage
Configuration de câblage du capteur de couleur TCS3200 vers Raspberry Pi :
| Capteur de Couleur TCS3200 | Raspberry Pi |
|---|---|
| VCC | 5V |
| GND | GND |
| OUT | GPIO23 |
| S0 | GPIO8 |
| S1 | GPIO7 |
| S2 | GPIO24 |
| S3 | GPIO25 |
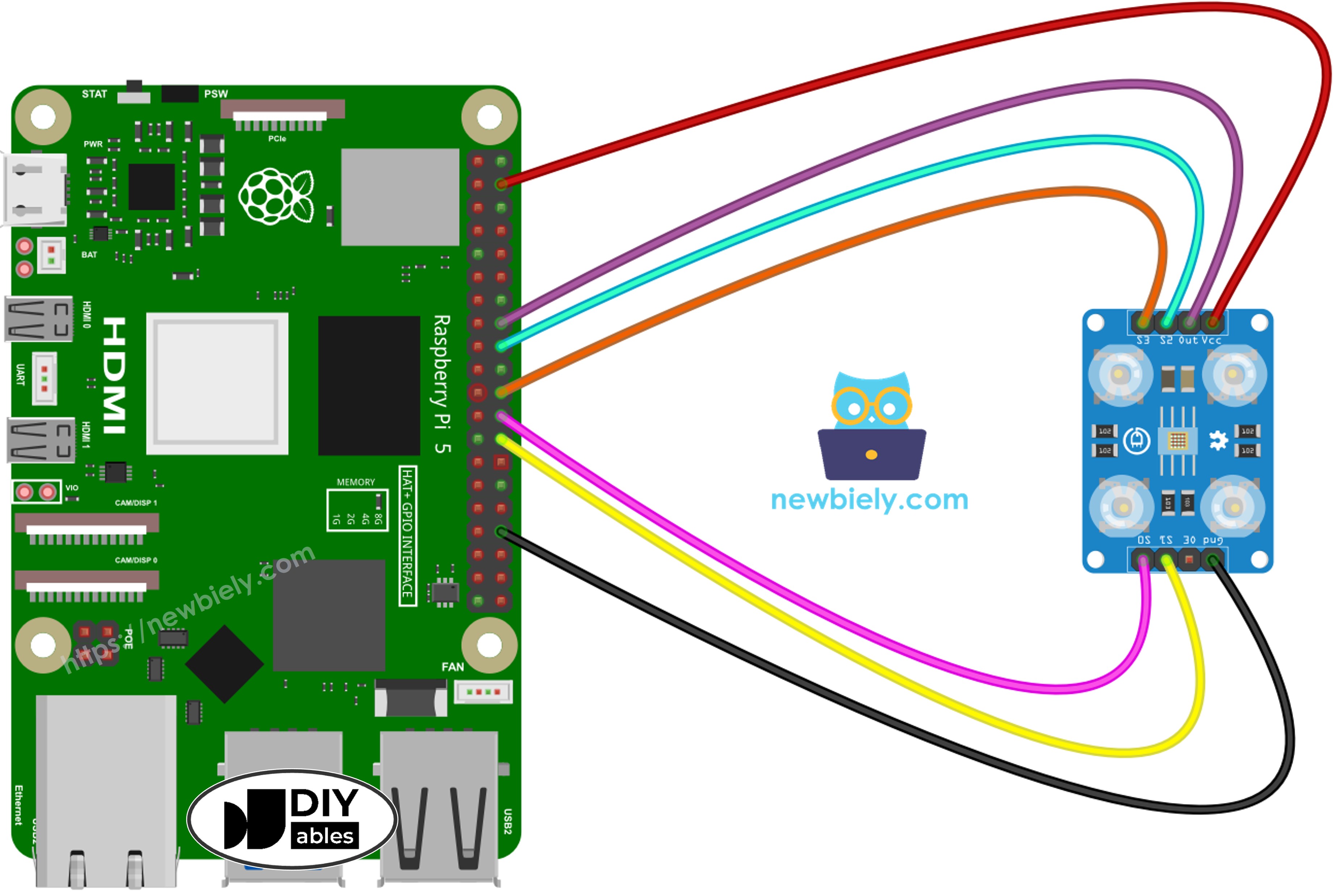
Cette image a été créée avec Fritzing. Cliquez pour agrandir l'image.
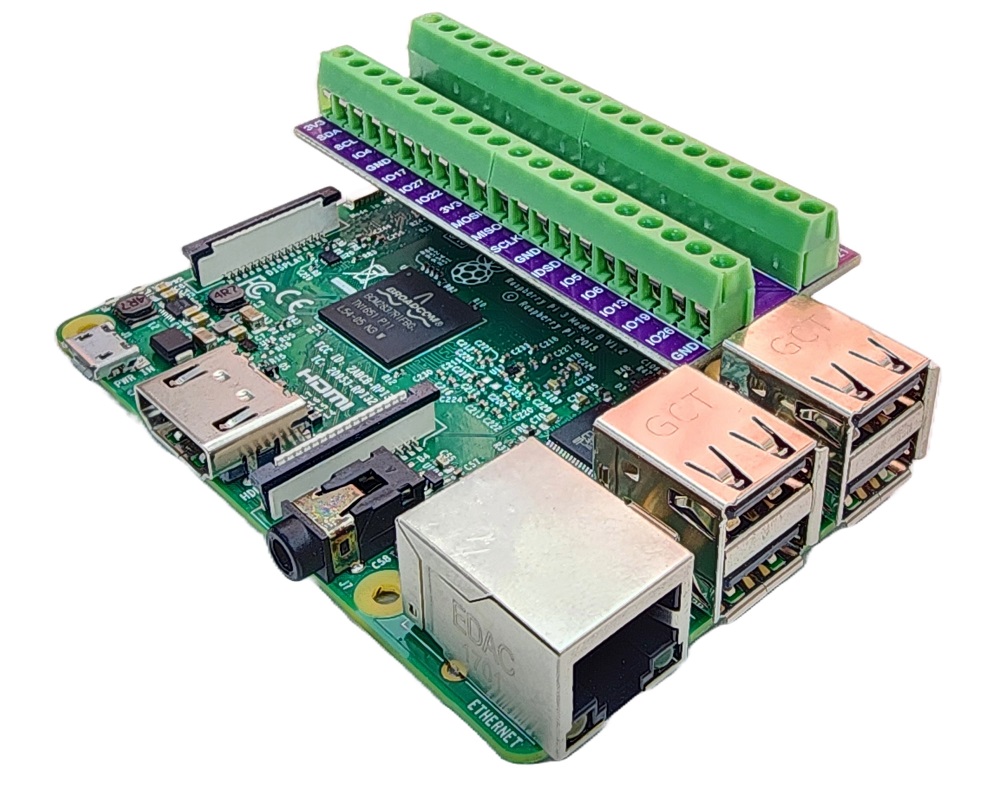
Pour simplifier et organiser votre montage de câblage, nous recommandons l'utilisation d'un shield à bornier à vis pour Raspberry Pi. Ce shield assure des connexions plus sûres et mieux gérées, comme illustré ci-dessous :
Code Raspberry Pi - Calibration par Largeur d'Impulsion
La calibration élimine les interférences environnementales des mesures brutes. Les variables incluant la puissance de sortie LED, l'espacement de la cible, la réflectivité du matériau et l'éclairage ambiant affectent toutes les lectures. Considérez-les comme des erreurs systématiques nécessitant une mesure. La routine de calibration identifie les largeurs d'impulsion minimales et maximales sur tous les canaux de couleur, établissant des limites de référence pour convertir les données brutes en valeurs RVB précises 0–255 correspondant à votre environnement de déploiement.
Étapes Rapides
- Copiez le code et sauvegardez-le dans un fichier, par exemple, tcs3200_calibration.py
- Exécutez le script :
- Exposez le capteur à diverses surfaces : matériaux blancs (papier d'imprimante), objets noirs, plus des articles multicolores
- Regardez les limites Min/Max se mettre à jour automatiquement au fur et à mesure que les extrêmes sont détectés
- Une fois que les valeurs se stabilisent (généralement 10-20 secondes), appuyez sur Ctrl+C pour arrêter
- Notez les six paramètres de calibration affichés
Paramètres de calibration extraits de la sortie ci-dessus :
- RedMin = 42, redMax = 210
- GreenMin = 55, greenMax = 185
- BlueMin = 60, blueMax = 172
Code Raspberry Pi - Mesure des Valeurs RVB
Étapes Rapides
- Identifiez les variables de calibration au début du code :
- Remplacez les six zéros par les données de calibration mesurées. Exemple avec les valeurs redMin = 42, redMax = 210, greenMin = 55, greenMax = 185, blueMin = 60, blueMax = 172 :
- Sauvegardez le code mis à jour dans un fichier, par exemple, tcs3200_sensor.py
- Exécutez le script :
- Disposez l'échantillon coloré devant le capteur
- Vérifiez la sortie RVB dans le terminal
Les valeurs RVB affichées sont conformes à l'échelle standard 0-255. Des largeurs d'impulsion réduites (indiquant des réflexions plus lumineuses) génèrent des sorties RVB plus élevées ; des largeurs d'impulsion étendues (réflexions plus sombres) donnent des valeurs plus basses.
Applications de Projet
Avec une capacité de mesure RVB opérationnelle, vous pouvez développer :
- Système de tri chromatique : Catégoriser les objets par couleur (différenciation rouge/vert/bleu)
- Dispositif de vérification des couleurs : Confirmer la cohérence des couleurs entre les échantillons
- Suiveur de chemin coloré : Robots qui naviguent le long de marqueurs chromatiques
- Inspection de qualité visuelle : Détecter les défauts de production par analyse des couleurs
- Automatisation déclenchée par couleur : Exécuter des actions quand des teintes spécifiques sont détectées