Raspberry Pi - Capteur d'obstacles
Ce tutoriel vous explique comment utiliser Raspberry Pi avec le capteur d'évitement d'obstacles infrarouge. En détail, nous allons apprendre :
- Comment connecter le Raspberry Pi au capteur infrarouge d'évitement d'obstacles.
- Comment programmer le Raspberry Pi pour lire l'état du capteur infrarouge d'évitement d'obstacles.
- Comment programmer le Raspberry Pi pour détecter les obstacles.
Préparation du matériel
Ou vous pouvez acheter les kits suivants:
| 1 | × | Kit de Capteurs DIYables (18 capteurs/écrans) |
À propos du capteur d'évitement d'obstacles infrarouge
Le capteur d'obstacles infrarouge est capable de détecter la présence d'un objet devant lui en utilisant des signaux infrarouges. La portée de détection est de 2 cm à 30 cm et peut être ajustée à l'aide d'un potentiomètre intégré.
Le brochage du capteur d'évitement d'obstacles infrarouge
Le capteur d'évitement d'obstacles IR a trois broches :
- Broche GND : doit être connectée à la masse (0V)
- Broche VCC : doit être connectée à VCC (5V ou 3.3V)
- Broche OUT : est une broche de sortie, LOW lorsqu'un obstacle est présent, HIGH lorsqu'il n'y a pas d'obstacle. Cette broche doit être connectée à une broche d'entrée d'un Raspberry Pi.
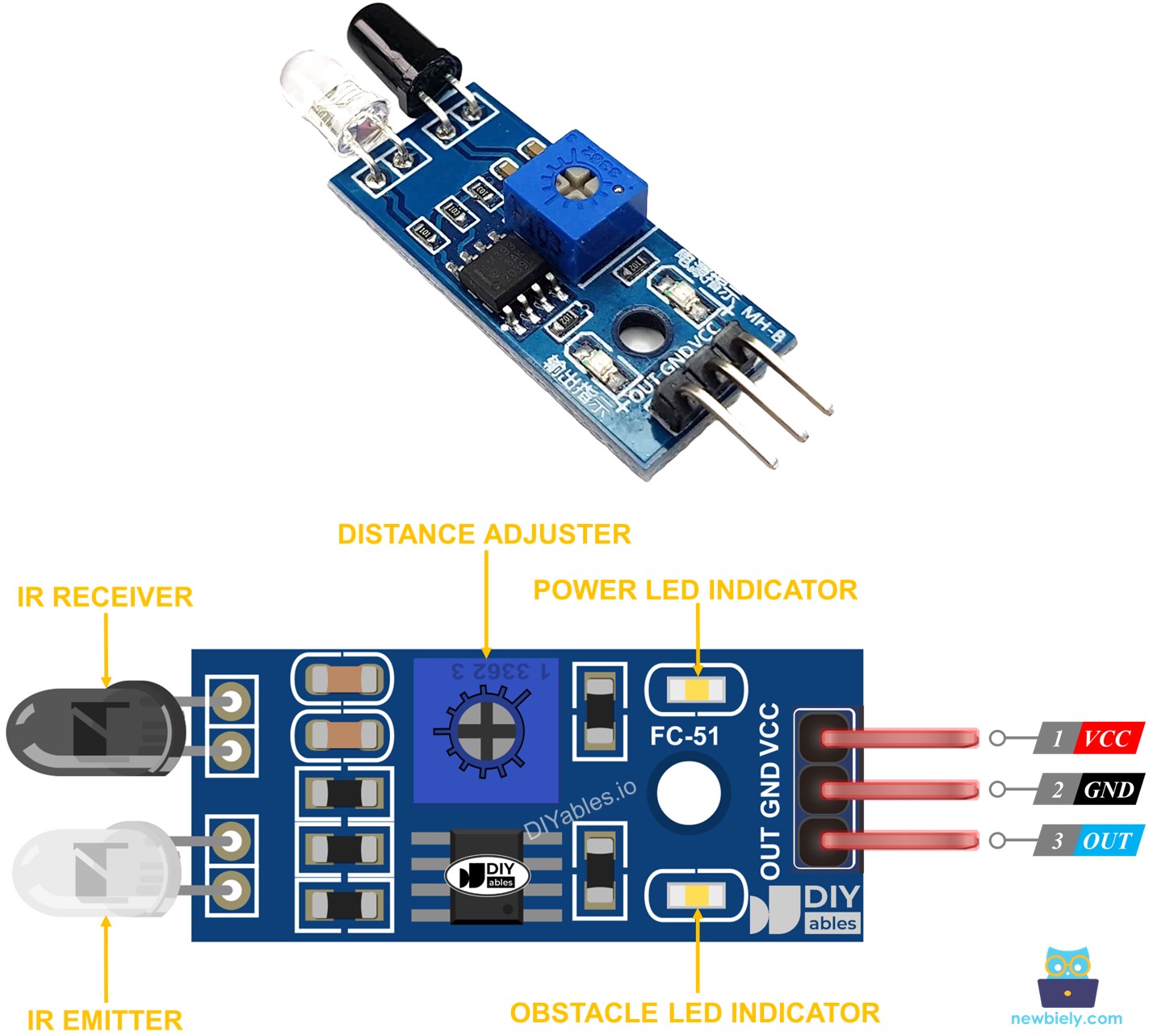
Comment ça marche
Le module capteur d'obstacles infrarouge dispose d'un émetteur IR intégré et d'un récepteur IR. L'émetteur IR envoie le signal IR. Le récepteur IR recherche le signal IR réfléchi pour détecter la présence d'un objet ou non. La broche OUT du capteur reflète la présence d'un obstacle :
- Si un obstacle se trouve devant le capteur, la broche OUT du capteur sera LOW.
- S'il n'y a pas d'obstacle devant le capteur, la broche OUT du capteur sera HIGH.
※ Note:
Pendant le transport, le capteur peut être déformé, ce qui peut entraîner des dysfonctionnements. Si le capteur ne fonctionne pas correctement, ajustez l'émetteur et le récepteur IR pour s'assurer qu'ils sont parallèles l'un à l'autre.
Diagramme de câblage
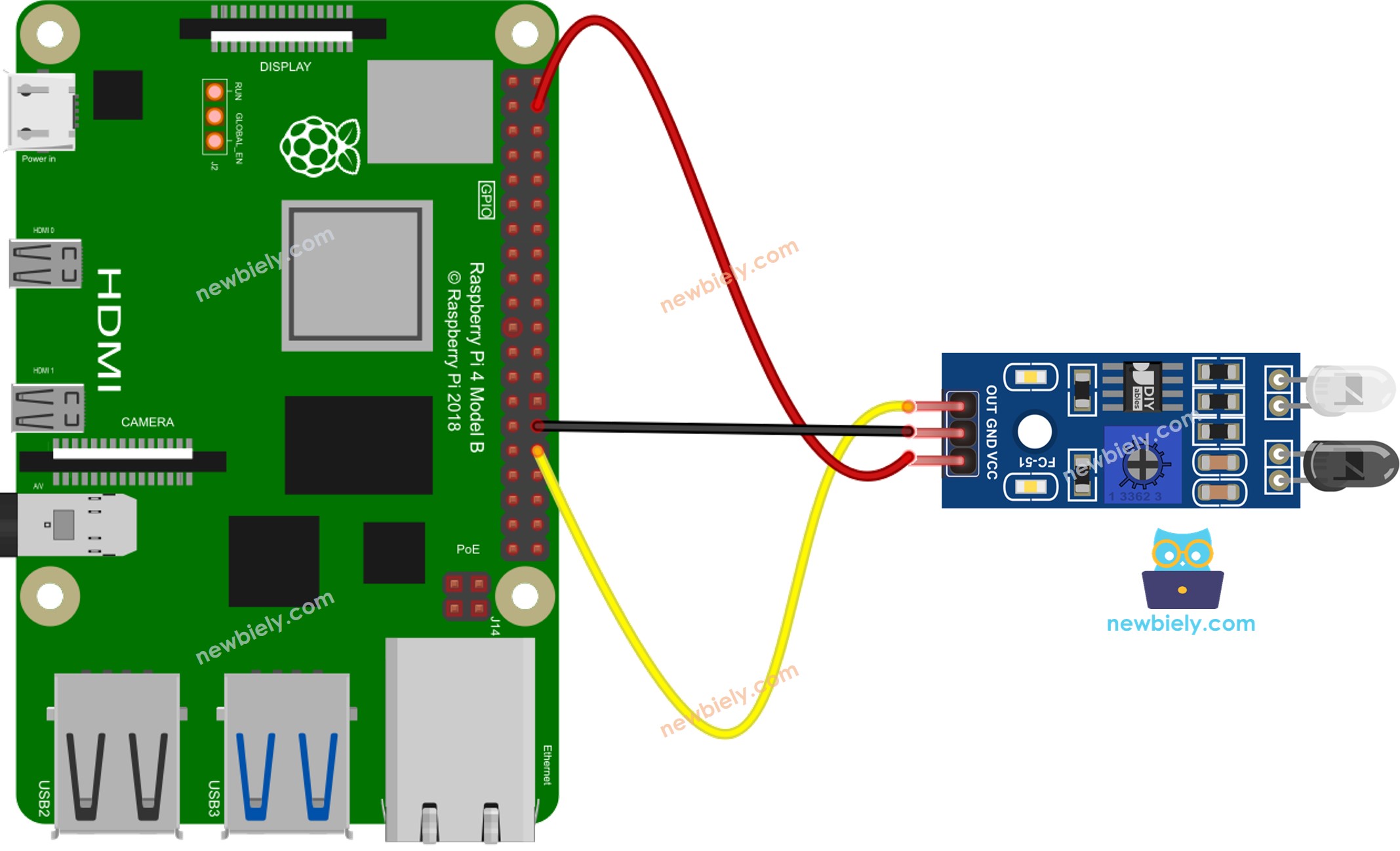
Cette image a été créée avec Fritzing. Cliquez pour agrandir l'image.
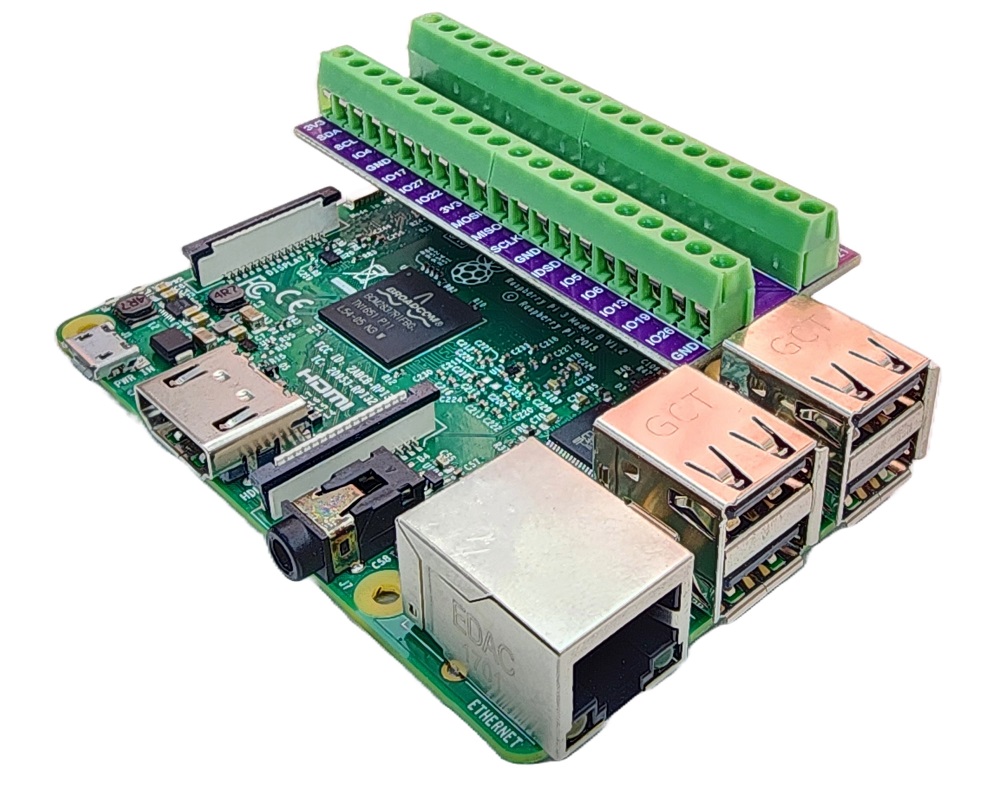
Pour simplifier et organiser votre montage de câblage, nous recommandons l'utilisation d'un shield à bornier à vis pour Raspberry Pi. Ce shield assure des connexions plus sûres et mieux gérées, comme illustré ci-dessous :
Comment programmer pour un capteur d'évitement d'obstacles infrarouge
- Initialise la broche Raspberry Pi en mode entrée numérique à l'aide de la fonction GPIO.setup().
- Utilisez la fonction GPIO.input() pour examiner l'état de la broche du Raspberry Pi.
Code pour Raspberry Pi
Deux approches peuvent être adoptées lors de la programmation d'une application d'évitement d'obstacles :
- Prendre des mesures selon que l'obstacle est présent ou non
- Prendre des mesures en fonction de l'obstacle détecté ou supprimé
Code Raspberry Pi pour vérifier si l'obstacle est présent
Étapes rapides
- Assurez-vous d'avoir Raspbian ou tout autre système d'exploitation compatible avec Raspberry Pi installé sur votre Pi.
- Assurez-vous que votre Raspberry Pi est connecté au même réseau local que votre PC.
- Assurez-vous que votre Raspberry Pi est connecté à Internet si vous devez installer certaines bibliothèques.
- Si c'est la première fois que vous utilisez Raspberry Pi, consultez Installation du logiciel - Raspberry Pi..
- Connectez votre PC au Raspberry Pi via SSH en utilisant le client SSH intégré sur Linux et macOS ou PuTTY sur Windows. Consultez comment connecter votre PC au Raspberry Pi via SSH.
- Assurez-vous d'avoir la bibliothèque RPi.GPIO installée. Sinon, installez-la en utilisant la commande suivante :
- Créez un fichier de script Python obstacle_sensor.py et ajoutez le code suivant :
- Enregistrez le fichier et exécutez le script Python en entrant la commande suivante dans le terminal :
- Placez un obstacle devant le capteur pendant un certain temps, puis retirez-le.
- Vérifiez le résultat dans le Terminal.
Le script s'exécute dans une boucle infinie en continu jusqu'à ce que vous appuyiez sur Ctrl + C dans le terminal.
Code Raspberry Pi pour détecter un obstacle
Étapes rapides
- Créez un fichier script Python obstacle_sensor_events.py et ajoutez le code suivant :
- Enregistrez le fichier et exécutez le script Python en entrant la commande suivante dans le terminal :
- Placez un obstacle devant le capteur pendant un moment, puis retirez-le.
- Vérifiez les résultats sur le terminal.