Raspberry Pi - Interrupteur de fin de course
Ce tutoriel vous explique comment utiliser Raspberry Pi avec l'interrupteur de fin de course. En détail, nous allons apprendre :
- Comment connecter le Raspberry Pi au capteur de fin de course.
- Comment programmer le Raspberry Pi pour lire l'état du capteur de fin de course.
- Comment programmer le Raspberry Pi pour vérifier si le capteur de fin de course est activé ou non.
Préparation du matériel
Ou vous pouvez acheter les kits suivants:
| 1 | × | Kit de Capteurs DIYables (18 capteurs/écrans) |
À propos de l'interrupteur de fin de course
Il est appelé interrupteur de fin de course car sa fonction principale est de détecter lorsqu'un objet en mouvement a atteint une limite.
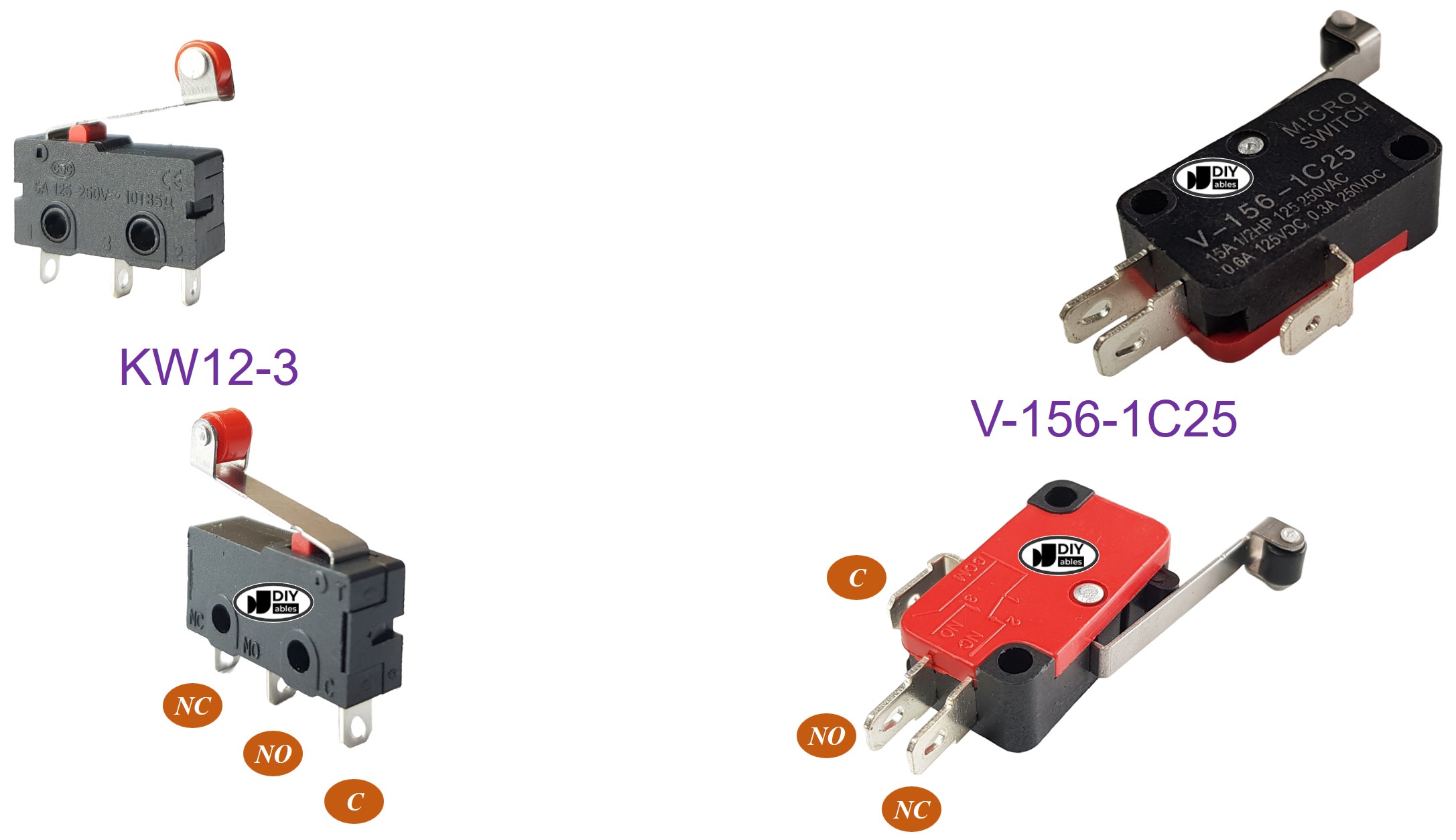
Le brochage de l'interrupteur de fin de course
Il existe différents types d'interrupteurs de fin de course, mais parmi les plus largement privilégiés se trouvent les modèles KW12-3 et V-156-1C25, chacun doté de trois broches :
- C : Il s'agit de la broche commune utilisée dans les modes normalement ouvert et normalement fermé.
- NO : Il s'agit de la broche normalement ouverte utilisée en mode normalement ouvert.
- NC : Il s'agit de la broche normalement fermée utilisée en mode normalement fermé.
Comment ça marche
Bien que le contacteur de fin de course ait trois broches, généralement seules deux broches sont utilisées : la broche C et l'une des deux autres. Par conséquent, il existe quatre configurations possibles. Le tableau suivant montre le câblage du contacteur de fin de course et les lectures correspondantes sur Raspberry Pi pour les quatre scénarios :
| C pin | NO pin | NC pin | Raspberry Pi Input Pin's State | |
|---|---|---|---|---|
| 1 | GND | Raspberry Pi Input Pin (with pull-up) | not connected | HIGH when untouched, LOW when touched |
| 2 | GND | not connected | Raspberry Pi Input Pin (with pull-up) | LOW when untouched, HIGH when touched |
| 3 | VCC | Raspberry Pi Input Pin (with pull-down) | not connected | LOW when untouched, HIGH when touched |
| 4 | VCC | not connected | Raspberry Pi Input Pin (with pull-down) | HIGH when untouched, LOW when touched |
Pour chaque méthode, nous pouvons interchanger la broche GND et la broche d'entrée du Raspberry Pi. Cela nous donne un total de 8 possibilités pour connecter un Raspberry Pi à un interrupteur de fin de course.
Nous devons choisir l'une des quatre options. Le reste du tutoriel utilisera la première méthode.
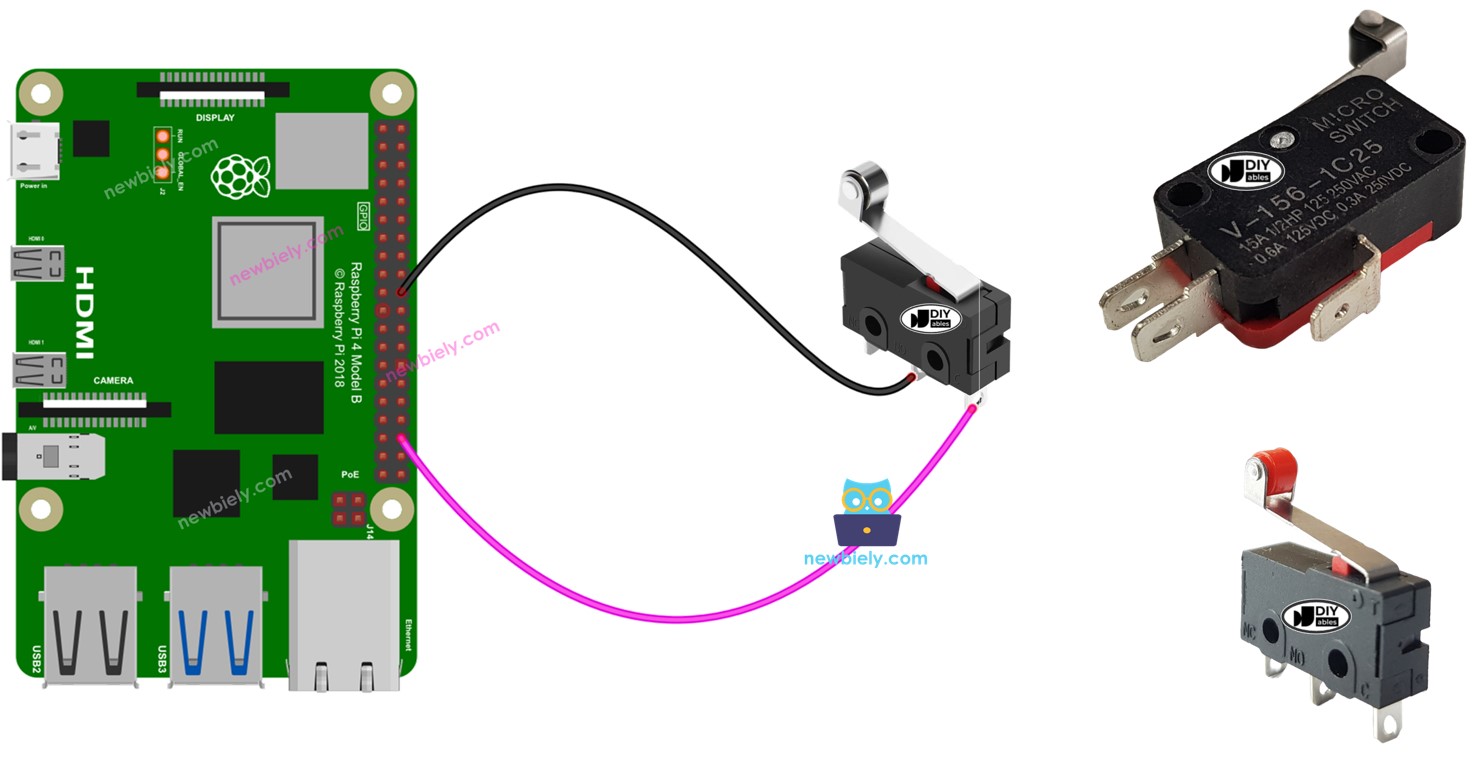
Diagramme de câblage
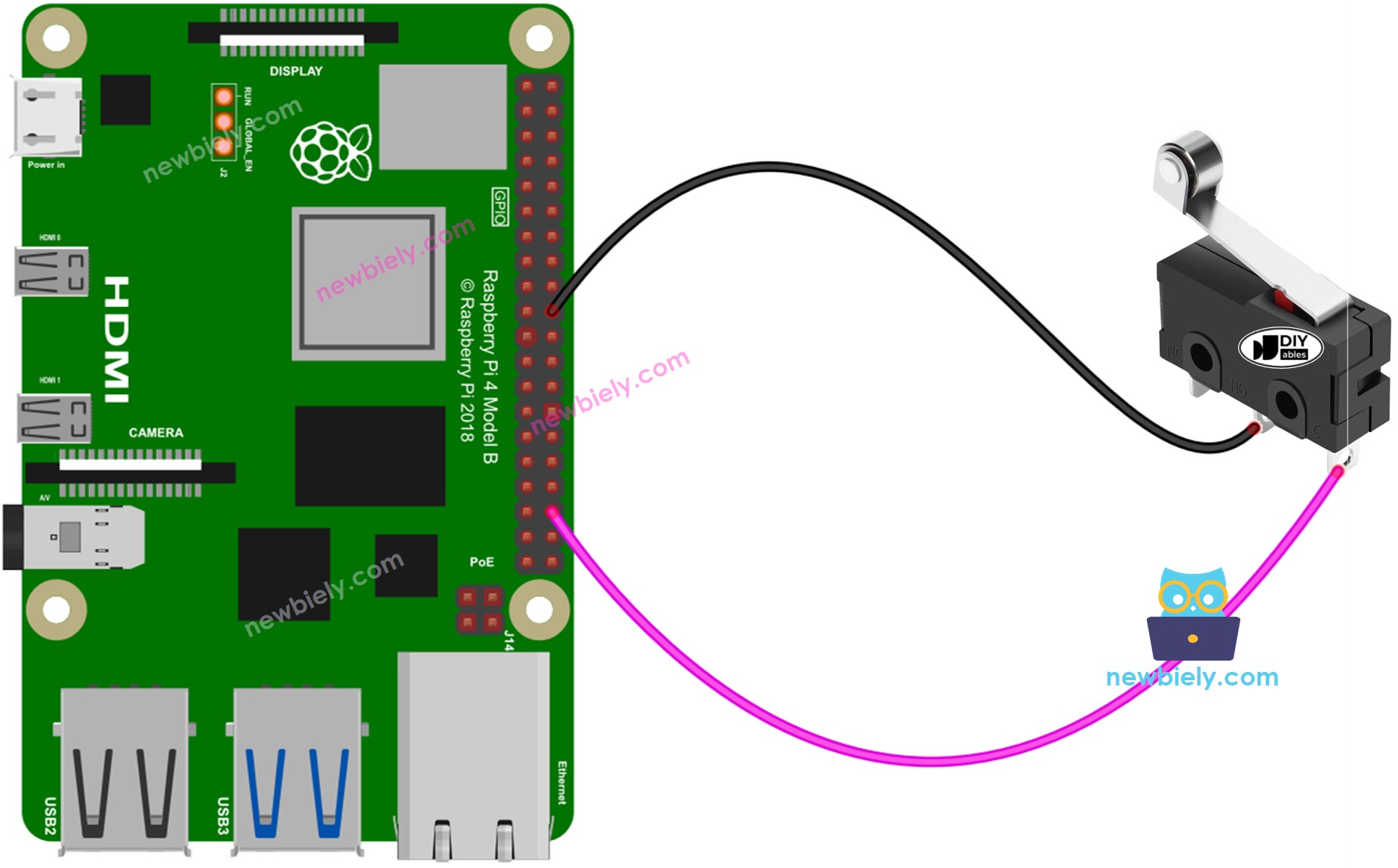
Cette image a été créée avec Fritzing. Cliquez pour agrandir l'image.
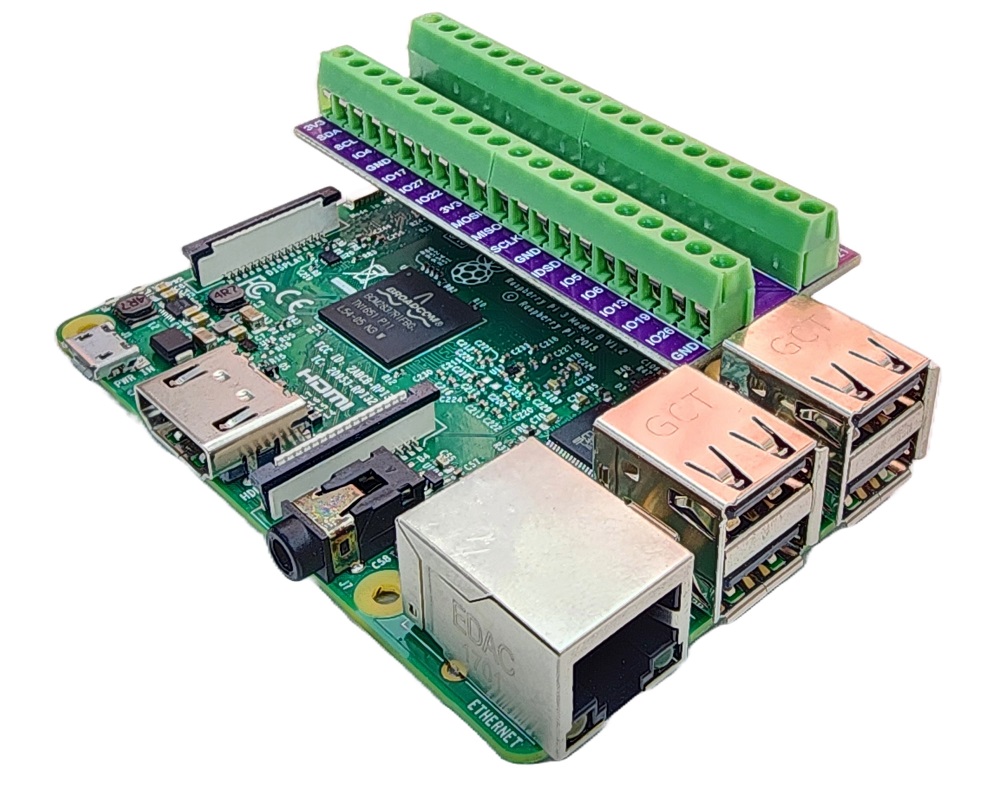
Pour simplifier et organiser votre montage de câblage, nous recommandons l'utilisation d'un shield à bornier à vis pour Raspberry Pi. Ce shield assure des connexions plus sûres et mieux gérées, comme illustré ci-dessous :
Pour une connexion de câblage sécurisée et fiable, nous vous suggérons d'utiliser un Fer à Souder pour souder ensemble les fils et les broches de l'interrupteur de fin de course. Ensuite, utilisez un Tube Thermorétractable pour plus de sécurité.
Code Raspberry Pi - Interrupteur de fin de course
Similaire à un bouton, un interrupteur de fin de course nécessite également un anti-rebond (pour plus d'informations, voir Pourquoi a-t-on besoin d'un anti-rebond pour le bouton/interrupteur de fin de course ?).
※ Note:
Deux applications populaires existent avec le limiteur :
- La première : Si l'interrupteur est TOUCHÉ, exécutez une action. Si l'interrupteur est NON TOUCHÉ, effectuez une action différente en réponse.
- La deuxième : Si l'interrupteur passe de NON TOUCHÉ à TOUCHÉ (ou de TOUCHÉ à NON TOUCHÉ), exécutez une action.
Étapes rapides
- Assurez-vous d'avoir Raspbian ou tout autre système d'exploitation compatible Raspberry Pi installé sur votre Pi.
- Assurez-vous que votre Raspberry Pi est connecté au même réseau local que votre PC.
- Assurez-vous que votre Raspberry Pi est connecté à Internet si vous devez installer des bibliothèques.
- Si c'est la première fois que vous utilisez Raspberry Pi, consultez Installation du logiciel - Raspberry Pi..
- Connectez votre PC au Raspberry Pi via SSH en utilisant le client SSH intégré sur Linux et macOS ou PuTTY sur Windows. Consultez comment connecter votre PC au Raspberry Pi via SSH.
- Assurez-vous que vous avez la bibliothèque RPi.GPIO installée. Sinon, installez-la en utilisant la commande suivante :
- Créez un fichier de script Python limit_switch.py et ajoutez le code suivant :
- Enregistrez le fichier et exécutez le script Python en entrant la commande suivante dans le terminal :
- Appuyez puis relâchez le bouton de fin de course.
- Visualisez le résultat dans le terminal.
Le script s'exécute dans une boucle infinie jusqu'à ce que vous appuyiez sur Ctrl + C dans le terminal.