Raspberry Pi - Capteur de Force
Ce didacticiel vous explique comment utiliser un Raspberry Pi avec le capteur de force. En détail, nous allons apprendre :
- Comment fonctionne le capteur de force
- Comment connecter le capteur de force au Raspberry Pi
- Comment programmer le Raspberry Pi pour lire la valeur du capteur de force
En tant qu'application typique, vous pouvez placer vos affaires sur le capteur de force, et si le Raspberry Pi détecte des changements de force, cela signifie que quelqu'un a pris vos affaires.
Préparation du matériel
Ou vous pouvez acheter les kits suivants:
| 1 | × | Kit de Capteurs DIYables (18 capteurs/écrans) |
À propos du capteur de force

Le capteur de force est également appelé résistance de détection de force, résistance sensible à la force, ou tout simplement FSR. C'est essentiellement une résistance qui modifie sa valeur résistive en réponse à la pression appliquée. Le capteur de force présente les caractéristiques suivantes :
- Il est peu coûteux et facile à utiliser.
- Il est efficace pour détecter la pression physique ou l'écrasement.
- Il n'est pas adapté pour mesurer le poids d'un objet.
Le capteur de force est utilisé dans une variété d'électroniques portables, comme les batteries électroniques, les téléphones mobiles et les appareils de jeu portables.
Le schéma de broches du capteur de force
Un capteur de force a deux broches qui sont symétriques, et comme il s'agit d'un type de résistance, il n'est pas nécessaire de les différencier.
Comment ça marche
Le capteur de force est essentiellement une résistance qui modifie sa résistance en fonction de la quantité de pression appliquée. Plus la pression exercée sur le capteur est forte, plus la résistance entre les deux broches sera faible.
Diagramme de câblage
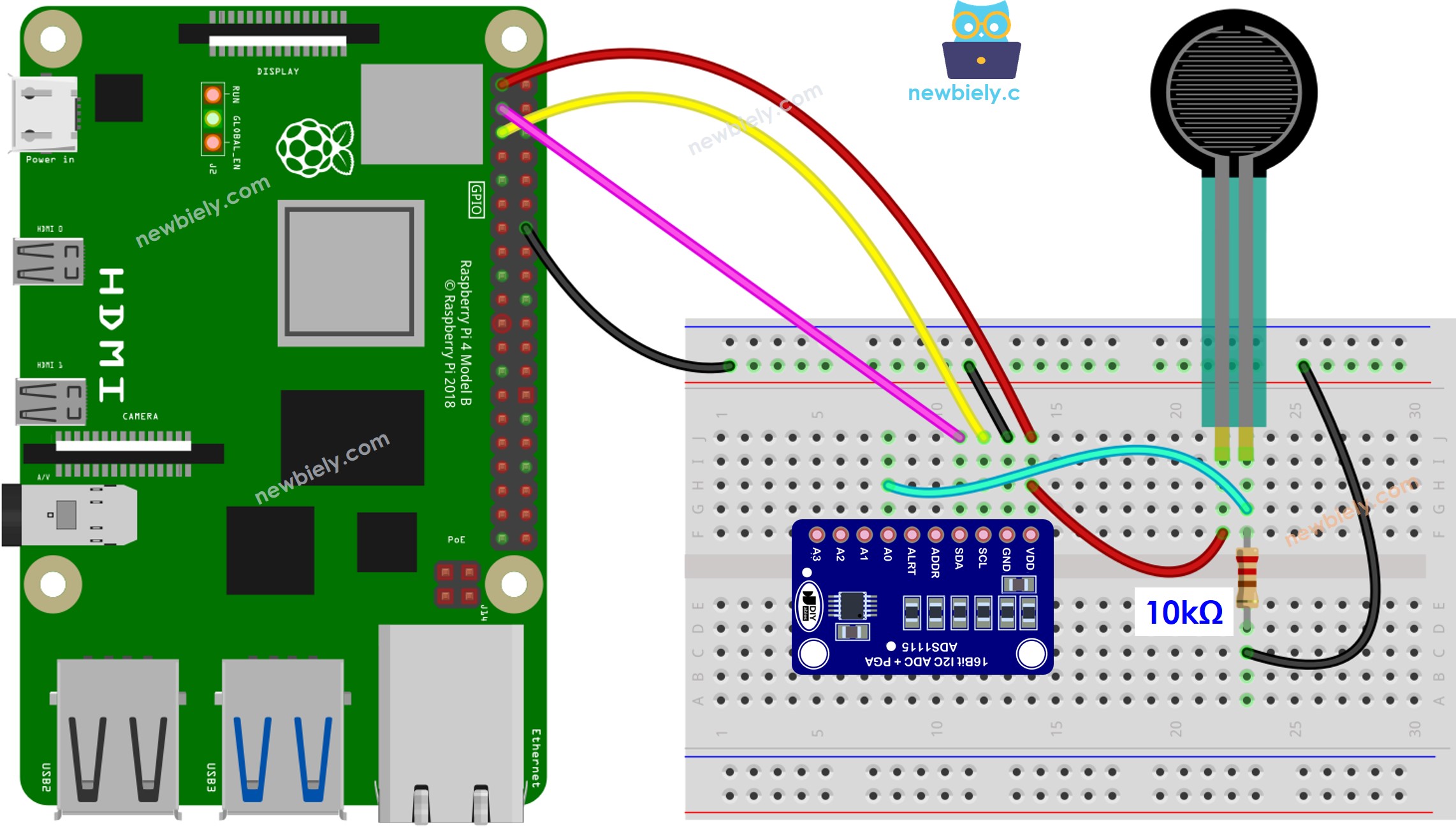
Cette image a été créée avec Fritzing. Cliquez pour agrandir l'image.
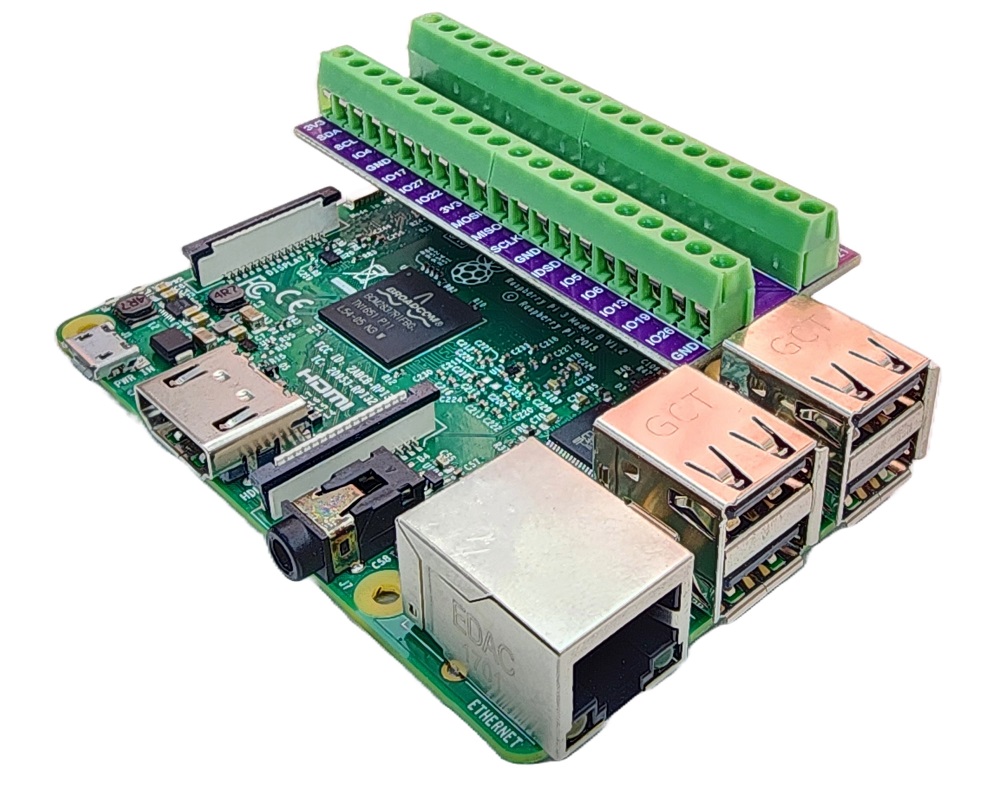
Pour simplifier et organiser votre montage de câblage, nous recommandons l'utilisation d'un shield à bornier à vis pour Raspberry Pi. Ce shield assure des connexions plus sûres et mieux gérées, comme illustré ci-dessous :
Code Raspberry Pi
Étapes rapides
- Assurez-vous d'avoir Raspbian ou un autre système d'exploitation compatible avec Raspberry Pi installé sur votre Pi.
- Assurez-vous que votre Raspberry Pi est connecté au même réseau local que votre PC.
- Assurez-vous que votre Raspberry Pi est connecté à Internet si vous avez besoin d'installer des bibliothèques.
- Si c'est la première fois que vous utilisez un Raspberry Pi, consultez Installation du logiciel - Raspberry Pi..
- Connectez votre PC au Raspberry Pi via SSH en utilisant le client SSH intégré sous Linux et macOS ou PuTTY sous Windows. Consultez comment connecter votre PC au Raspberry Pi via SSH.
- Assurez-vous d'avoir la bibliothèque RPi.GPIO installée. Si ce n'est pas le cas, installez-la en utilisant la commande suivante :
- Installez la bibliothèque Adafruit_ADS1x15 en exécutant les commandes suivantes dans le terminal de votre Raspberry Pi :
- Créez un fichier de script Python force_sensor.py et ajoutez le code suivant :
- Enregistrez le fichier et exécutez le script Python en entrant la commande suivante dans le terminal :
- Appuyez sur le capteur de force.
- Vérifiez les résultats dans le Terminal.
Le script s'exécute en boucle infinie jusqu'à ce que vous appuyiez sur Ctrl + C dans le terminal.