Raspberry Pi - Servomoteur avec potentiomètre
Ce didacticiel vous explique comment utiliser le Raspberry Pi pour contrôler l'angle d'un servomoteur en fonction de la valeur d'entrée d'un potentiomètre. En détail, nous apprendrons :
- Comment connecter le potentiomètre et le servomoteur au Raspberry Pi
- Comment programmer le Raspberry Pi pour lire la valeur d'un potentiomètre et contrôler un servomoteur en conséquence.
Préparation du matériel
Ou vous pouvez acheter les kits suivants:
| 1 | × | Kit de Capteurs DIYables (18 capteurs/écrans) |
Note d'achat: Si vous utilisez plusieurs servomoteurs, nous recommandons d'utiliser le PCA9685 16 Channel PWM Servo Driver Module pour économiser les broches du MCU et faciliter le câblage.
À propos du Servomoteur et du Potentiomètre
Si vous n'êtes pas familier avec les servomoteurs et les potentiomètres (brochages, fonctionnement, programmation, etc.), les tutoriels suivants peuvent vous aider :
Diagramme de câblage
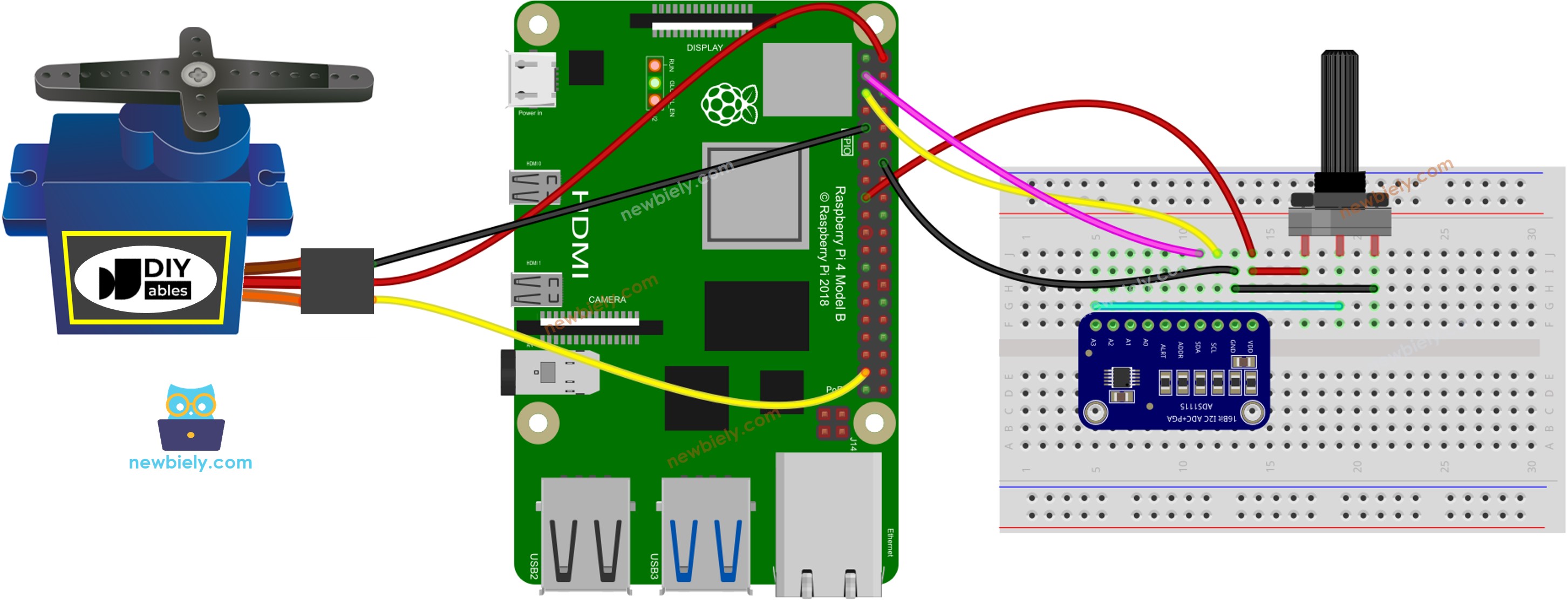
Cette image a été créée avec Fritzing. Cliquez pour agrandir l'image.
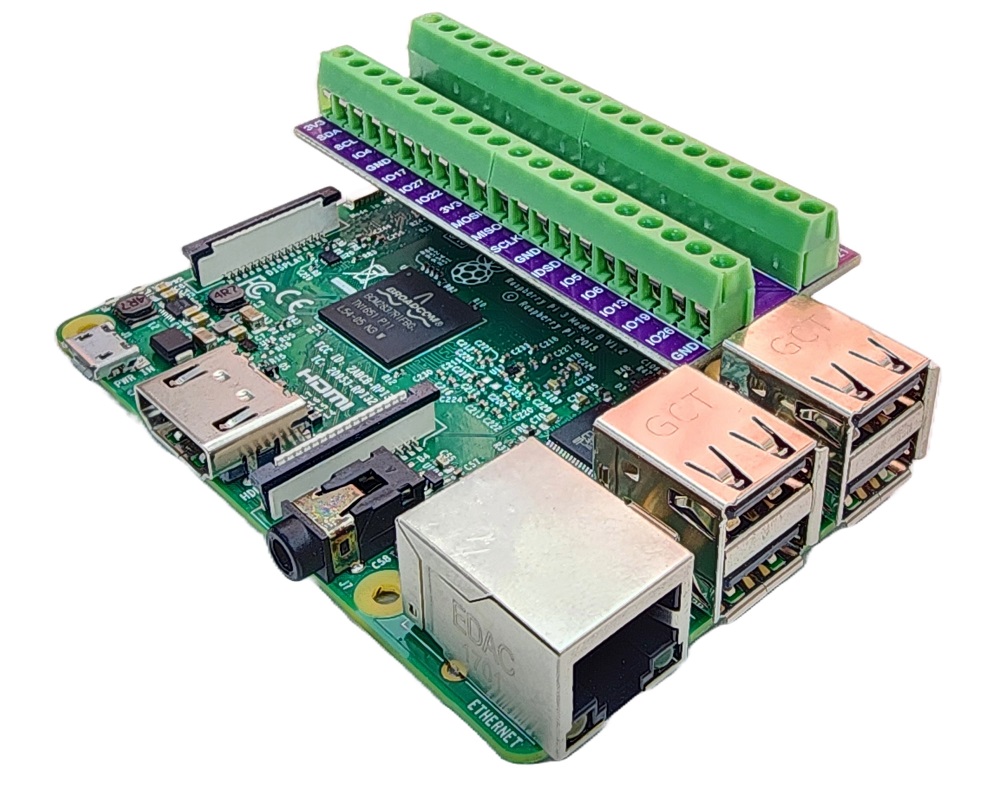
Pour simplifier et organiser votre montage de câblage, nous recommandons l'utilisation d'un shield à bornier à vis pour Raspberry Pi. Ce shield assure des connexions plus sûres et mieux gérées, comme illustré ci-dessous :
Code Raspberry Pi
Étapes rapides
- Assurez-vous que vous avez Raspbian ou tout autre système d'exploitation compatible avec Raspberry Pi installé sur votre Pi.
- Assurez-vous que votre Raspberry Pi est connecté au même réseau local que votre PC.
- Assurez-vous que votre Raspberry Pi est connecté à Internet si vous avez besoin d'installer des bibliothèques.
- Si c'est la première fois que vous utilisez Raspberry Pi, voyez Installation du logiciel - Raspberry Pi..
- Connectez votre PC au Raspberry Pi via SSH en utilisant le client SSH intégré sur Linux et macOS ou PuTTY sur Windows. Voir comment connecter votre PC au Raspberry Pi via SSH.
- Assurez-vous que vous avez la bibliothèque RPi.GPIO installée. Sinon, installez-la en utilisant la commande suivante :
- Installez la bibliothèque Adafruit_ADS1x15 en exécutant les commandes suivantes dans le terminal de votre Raspberry Pi :
- Créez un fichier de script Python potentiometer_servo.py et ajoutez le code suivant :
- Enregistrez le fichier et exécutez le script Python en utilisant la commande suivante dans le terminal :
Le script s'exécute en boucle infinie jusqu'à ce que vous appuyiez sur Ctrl + C dans le terminal.
- Tournez le potentiomètre
- Vérifiez la rotation du servo-moteur
- Consultez le résultat dans le Moniteur Série
Explication du Code
Consultez l'explication ligne par ligne contenue dans les commentaires du code source !