Arduino Nano - Capteur tactile - Moteur servo
Ce didacticiel vous explique comment utiliser un Arduino Nano et un capteur tactile pour contrôler un moteur servo. En détail :
- Lorsque le capteur tactile est touché, l'Arduino Nano fait tourner le moteur servo à 90 degrés.
- Lorsque le capteur tactile est touché à nouveau, l'Arduino Nano fait tourner le moteur servo à 0 degré.
Les mêmes étapes sont à nouveau exécutées.
Préparation du matériel
Ou vous pouvez acheter les kits suivants:
| 1 | × | Kit de Capteurs DIYables (18 capteurs/écrans) |
Note d'achat: Si vous utilisez plusieurs servomoteurs, nous recommandons d'utiliser le PCA9685 16 Channel PWM Servo Driver Module pour économiser les broches du MCU et faciliter le câblage.
À propos du servomoteur et du capteur tactile
Si vous n'êtes pas familier avec les moteurs servo et les capteurs tactiles (y compris les brochages, leur fonctionnement et comment les programmer), les tutoriels suivants peuvent vous aider :
Diagramme de câblage
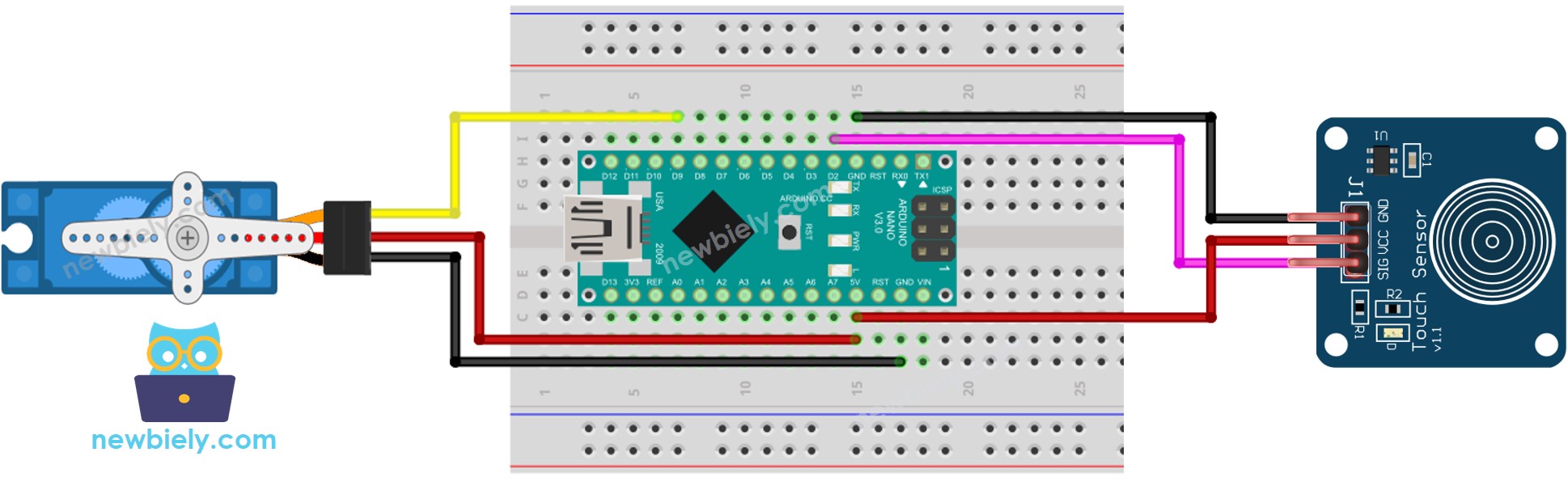
Cette image a été créée avec Fritzing. Cliquez pour agrandir l'image.
Il convient de noter que le schéma de câblage présenté ci-dessus convient uniquement à un servomoteur à faible couple. Si le moteur vibre au lieu de tourner, une source d'alimentation externe doit être utilisée pour faire fonctionner le servomoteur. Le schéma de câblage suivant montre comment connecter le servomoteur à une source d'alimentation externe.
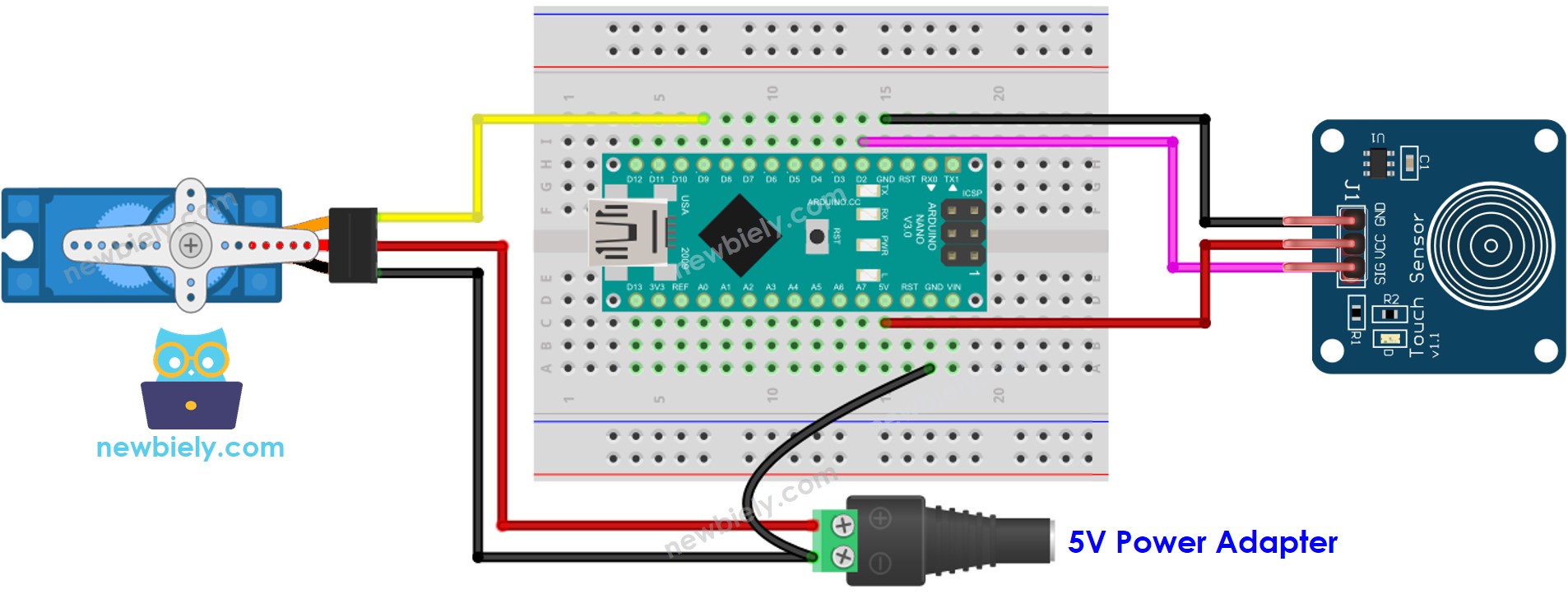
Cette image a été créée avec Fritzing. Cliquez pour agrandir l'image.
Voir Comment alimenter un Arduino Nano..
Veuillez ne pas oublier de connecter le GND de l'alimentation externe au GND de l'Arduino.
Code Arduino Nano - Le capteur tactile contrôle le moteur servo
Étapes rapides
- Connectez votre Arduino Nano à un ordinateur via un câble USB.
- Lancez l'Arduino IDE, sélectionnez le type de carte et le port corrects.
- Copiez le code ci-dessus et ouvrez-le dans l'Arduino IDE.
- Cliquez sur le bouton Upload dans l'Arduino IDE pour envoyer le code à l'Arduino Nano.
- Tapez plusieurs fois sur le capteur tactile.
- Observez le changement d'angle du moteur servo.