Arduino Nano - Moteur
Ce tutoriel vous explique comment utiliser Arduino Nano et ......... pour contrôler ........... . En détail :
- Les types de moteurs pouvant être utilisés avec Arduino Nano
- Les distinctions entre les différents types de moteurs
- Comment gérer chaque type de moteur
Types de moteurs
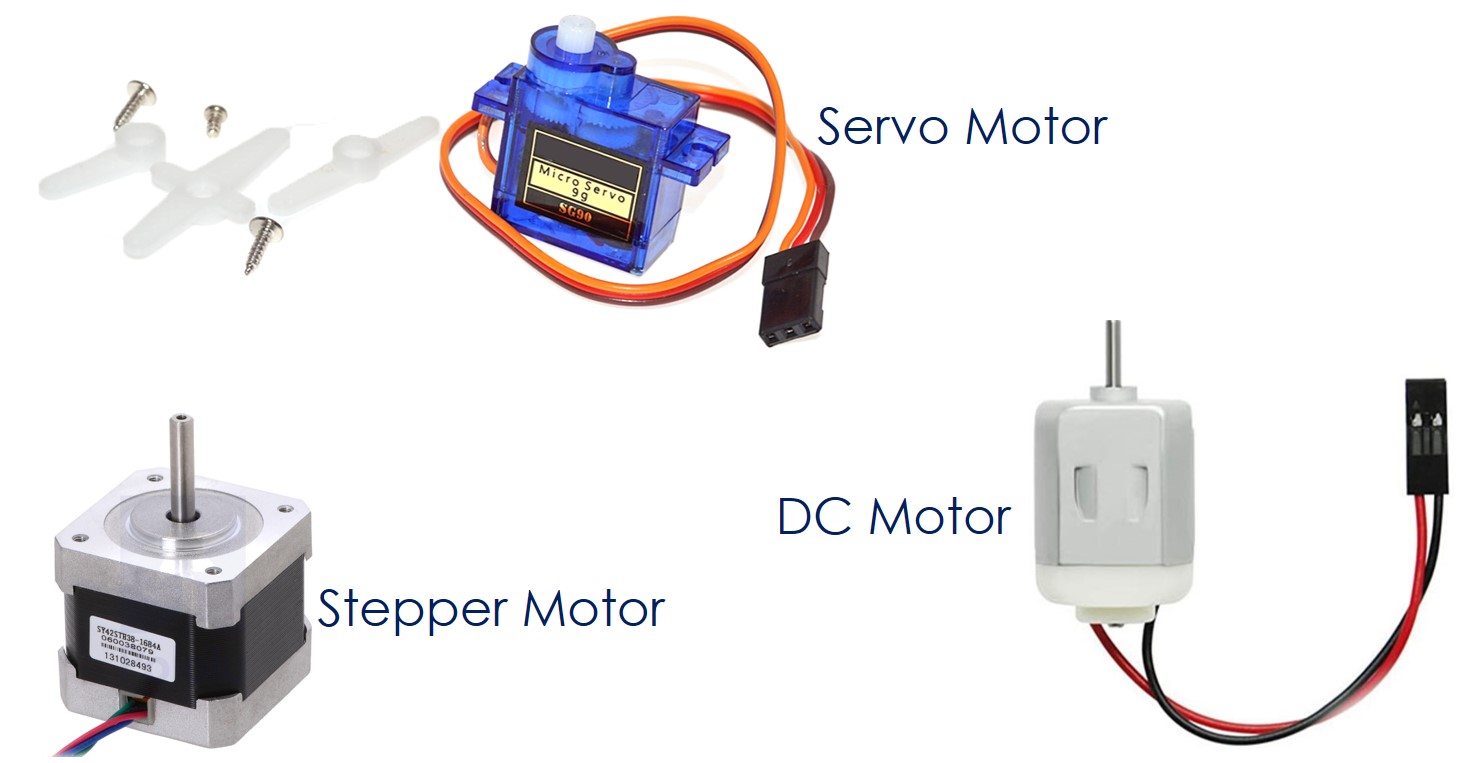
Il existe trois types de moteurs couramment utilisés avec Arduino :
- Moteur servo
- Moteur pas à pas
- Moteur à courant continu
Il existe deux types principaux de moteurs servo : le moteur servo 180° et le moteur servo 360°. Généralement, lorsque les gens parlent d'un moteur servo, ils font généralement référence au moteur servo 180°.
Un servo-moteur 360° est similaire à un moteur CC, mais ne nécessite pas de pilote matériel.
Moteur servo 180°
Caractéristiques
- L'amplitude de rotation va de 0° à 180°.
- Le sens de rotation peut être horaire ou antihoraire.
- Il est possible de contrôler la rotation à un angle spécifique entre 0° et 180°.
- La vitesse de rotation est réglable, mais pas de manière fluide.
- Aucun pilote matériel supplémentaire n'est nécessaire pour le contrôle, car cela peut être fait directement depuis une broche d'Arduino Nano.
- Une alimentation supplémentaire est nécessaire.
- Contrôler la rotation est facile, car cela peut être fait avec un signal PWM.
Demande
- Toute application qui nécessite uniquement une rotation d'un angle entre 0° et 180°.
Tutoriel sur les servomoteurs
Visitez Arduino Nano - Moteur Servo. pour un tutoriel sur Arduino Nano et le moteur servo.
Moteur pas à pas
Caractéristiques
- Le degré de rotation n'est pas limité.
- La direction de la rotation peut être dans le sens des aiguilles d'une montre ou dans le sens inverse.
- La position de la rotation peut être précisément ajustée à n'importe quel angle.
- La vitesse de rotation peut être contrôlée avec précision, ainsi que l'accélération et la décélération.
- Un matériel supplémentaire et une alimentation sont nécessaires.
- Sa gestion est complexe, il est donc conseillé aux débutants d'utiliser une bibliothèque.
Application
- Automatisation et robotique
- Imprimantes, imprimantes 3D, CNC, traceurs X-Y
- Machines à cocktails
Tutoriel sur les moteurs pas à pas
Découvrez ce tutoriel sur Arduino Nano et les moteurs pas à pas : Arduino Nano - Moteur pas à pas.. Explorez le tutoriel sur Arduino Nano et les moteurs pas à pas : Arduino Nano - Moteur pas à pas.
Lien : Arduino Nano - Moteur pas à pas.. Ce lien fournit un tutoriel pour contrôler un moteur pas à pas avec un Arduino Nano et un pilote L298N : Arduino Nano - Moteur pas à pas.. Pour des instructions sur l'utilisation de l'Arduino Nano pour contrôler un moteur pas à pas avec un pilote L298N, veuillez consulter le tutoriel suivant : Arduino Nano - Moteur pas à pas.. Si vous cherchez des conseils sur comment utiliser l'Arduino Nano pour contrôler un moteur pas à pas avec un pilote L298N, consultez ce tutoriel : Arduino Nano - Moteur pas à pas..
Arduino Nano - Moteur pas à pas 28BYJ-48 avec driver ULN2003.. Un guide sur comment utiliser un Arduino Nano pour contrôler un moteur pas à pas 28BYJ-48 avec le pilote ULN2003.
Moteur à courant continu
Caractéristiques
- Le nombre de rotations n'est pas limité.
- Le sens de rotation peut être dans le sens des aiguilles d'une montre ou dans le sens inverse.
- Il est très difficile de tourner à un angle précis.
- Il est facile de contrôler la vitesse de rotation, mais il est difficile de régler une valeur de vitesse spécifique.
- Un pilote matériel supplémentaire est nécessaire.
- Une alimentation supplémentaire est également requise.
- Contrôler la rotation est simple, il suffit d'utiliser un signal PWM haute tension.
※ Note:
- Pour atteindre un positionnement précis d'un moteur à courant continu, du matériel supplémentaire est nécessaire, tel qu'un encodeur, et une méthode de contrôle en boucle fermée, comme le contrôle PID, doit être utilisée. Cela peut être difficile pour les débutants.
- Pour la régulation de la vitesse, il est facile d'ajuster la vitesse, comme lent, moyen, rapide ou très rapide, ainsi que le pourcentage de la vitesse maximale. Cependant, pour contrôler le nombre de rotations par seconde, un encodeur et une méthode de contrôle en boucle fermée comme le contrôle PID sont nécessaires. Cela peut être difficile pour ceux qui débutent.
- Certains moteurs à courant continu sur le marché sont équipés d'un encodeur intégré, ce qui simplifie le processus de contrôle.
Application
- Auparavant utilisé pour gérer quelque chose qui nécessite une rotation constante, sans avoir besoin de spécifier la vitesse. Les exemples incluent les ventilateurs, les pompes, les voitures télécommandées, les perceuses, etc.
※ Note:
et robotique. Il existe deux types principaux de moteurs à courant continu : à balais et sans balais. Les moteurs à courant continu à balais sont couramment utilisés dans les projets de bricolage et la robotique.
Tutoriel sur les moteurs à courant continu
Découvrez notre Arduino Nano - Moteur à courant continu. pour plus d'informations ! Jetez un œil à notre Arduino Nano - Moteur à courant continu. pour plus de détails !
Guide de sélection de moteur
Lors de la sélection d'un moteur pour un projet, plusieurs facteurs doivent être pris en compte, tels que le poids à supporter, l'alimentation électrique, et les caractéristiques de l'application :
- Si votre projet nécessite une rotation entre 0° et 180°, alors vous devriez rechercher un servomoteur 180°
- Si votre projet doit effectuer des rotations précises vers n'importe quelle position, alors vous devriez trouver un moteur pas à pas
- Si votre projet a besoin de tourner continuellement sans position spécifique, alors vous devriez acquérir un moteur CC ou un servomoteur 360°