Arduino Nano - Capteur d'obstacles
Ce tutoriel vous explique comment utiliser l'Arduino Nano avec le capteur d'évitement d'obstacles infrarouge. En détail, nous allons apprendre :
- Comment connecter l'Arduino Nano au capteur d'évitement d'obstacles infrarouge.
- Comment programmer l'Arduino Nano pour lire l'état du capteur d'évitement d'obstacles infrarouge.
- Comment programmer l'Arduino Nano pour détecter des obstacles.
Préparation du matériel
Ou vous pouvez acheter les kits suivants:
| 1 | × | Kit de Capteurs DIYables (18 capteurs/écrans) |
À propos du capteur d'évitement d'obstacles IR
Le capteur d'obstacles infrarouge est utilisé pour détecter la présence de tout obstacle devant le module au moyen du signal infrarouge. Sa portée de détection se situe entre 2 cm et 30 cm, et peut être ajustée avec un potentiomètre intégré.
Brochage du capteur d'évitement d'obstacles infrarouge
Le capteur de détection d'obstacles IR possède trois broches :
- Broche GND : doit être connectée à GND (0V)
- Broche VCC : doit être connectée à VCC (5V ou 3,3V)
- Broche OUT : est une broche de sortie - elle sera en LOW lorsqu'un obstacle est détecté et en HIGH lorsqu'il n'y a pas d'obstacle. Cette broche doit être connectée à une broche d'entrée de l'Arduino Nano.
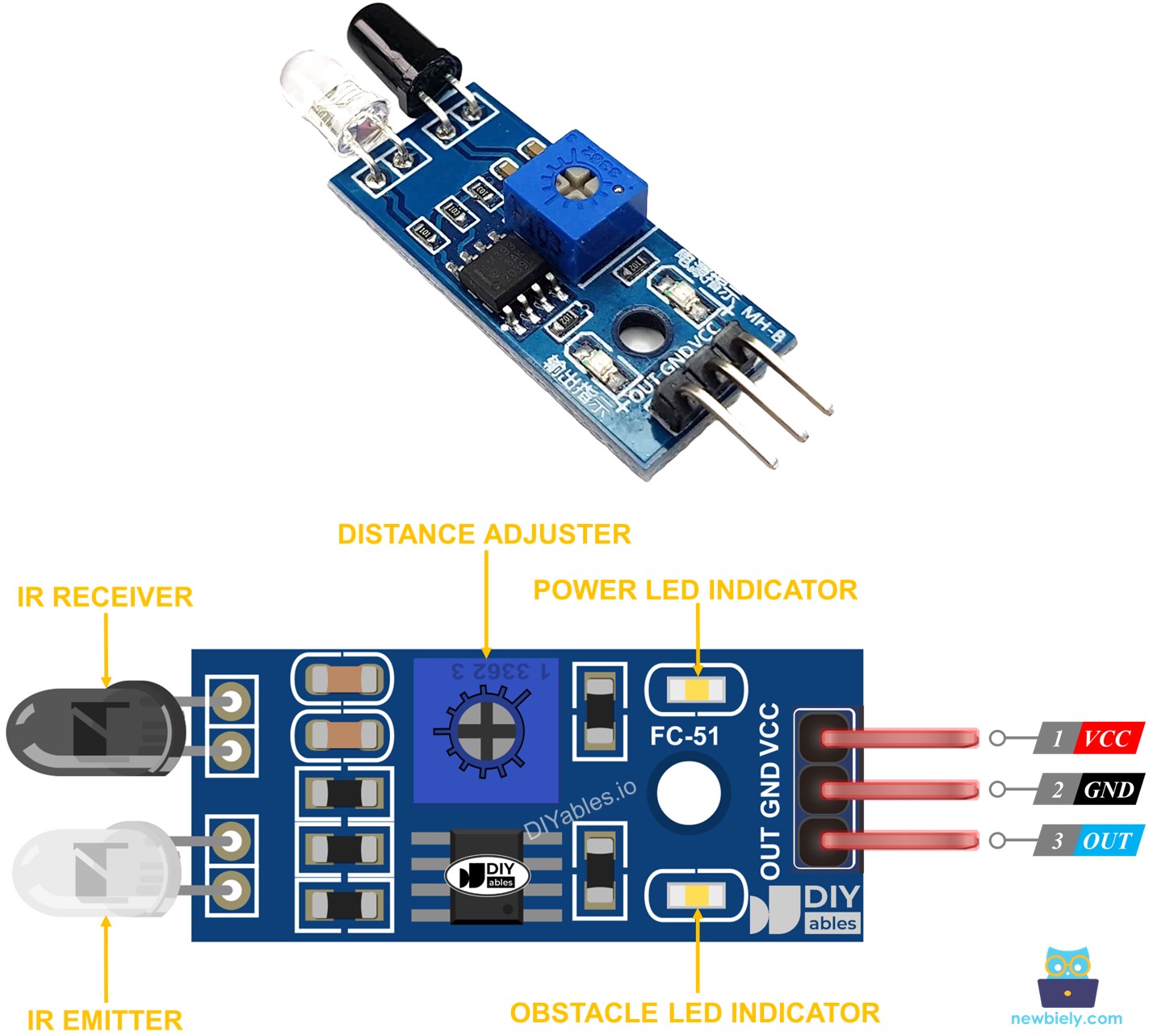
Comment ça fonctionne
Le module de capteur d'obstacles infrarouge contient un émetteur IR et un récepteur IR. L'émetteur émet le signal IR. Le récepteur recherche le signal IR réfléchi pour détecter la présence ou non d'un objet. La broche OUT du capteur indiquera la présence d'un obstacle :
- Si un obstacle est devant le capteur, la broche OUT sera à l'état BAS
- Si aucun obstacle n'est devant le capteur, la broche OUT sera à l'état HAUT
※ Note:
Le capteur peut se déformer pendant le transport, ce qui peut entraîner un dysfonctionnement. Si le capteur ne fonctionne pas correctement, ajustez l'émetteur et le récepteur IR pour vous assurer qu'ils sont parallèles l'un à l'autre.
Diagramme de câblage
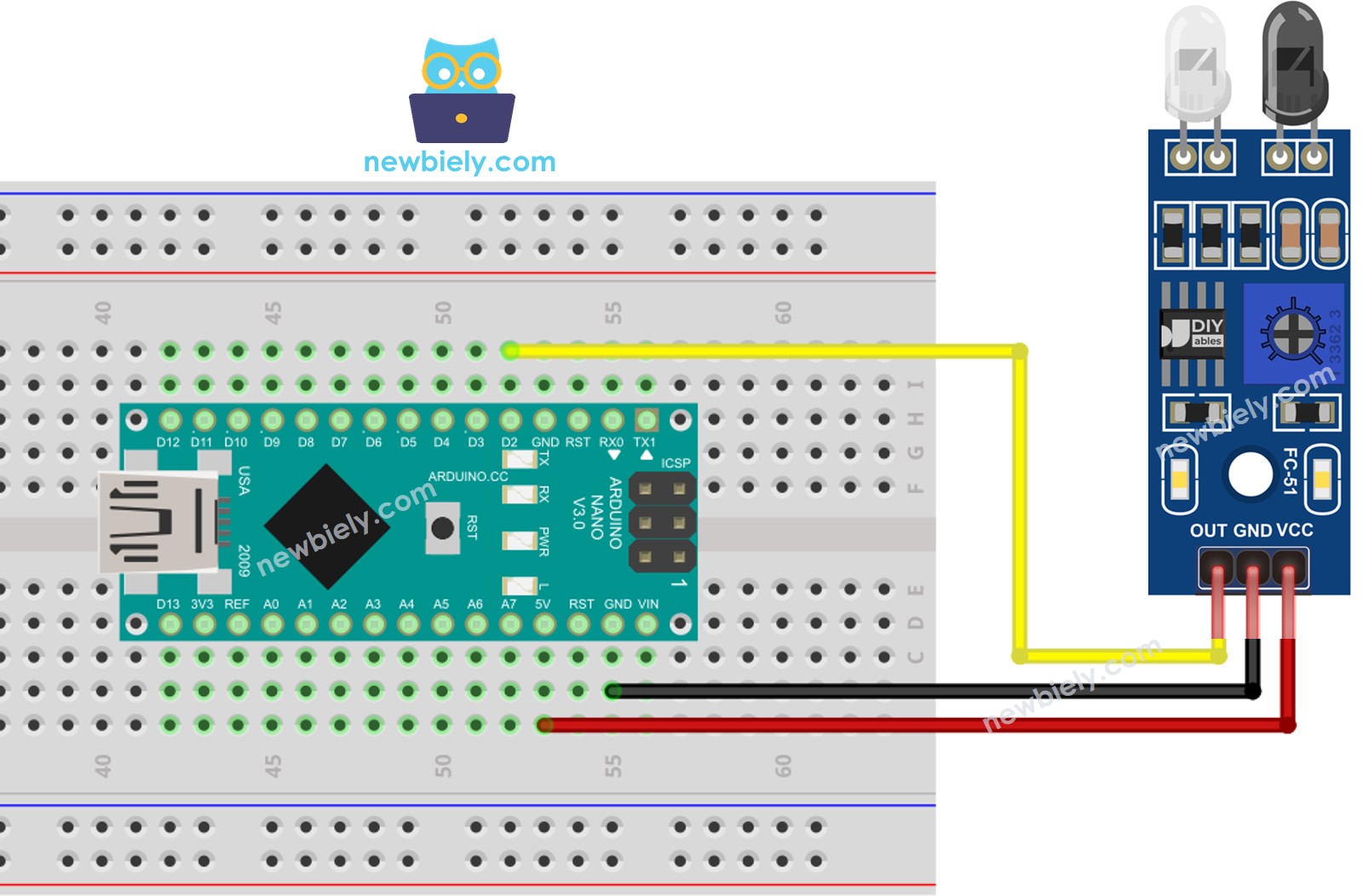
Cette image a été créée avec Fritzing. Cliquez pour agrandir l'image.
Comment programmer pour un capteur d'évitement d'obstacles IR
- Initialise la broche de l'Arduino Nano en mode entrée numérique en utilisant la fonction pinMode(). Par exemple, D2 :
- Utilise la fonction digitalRead() pour lire l'état du pin de l'Arduino Nano.
Code Arduino Nano
Deux méthodes existent pour programmer une application d'évitement d'obstacles :
- Prendre des mesures ou non lorsque un obstacle est présent ou absent
- Prendre des mesures ou non lorsque un obstacle est détecté ou éliminé
Code Arduino Nano pour vérifier si un obstacle est présent
Étapes rapides
- Copiez le code et ouvrez-le avec l'IDE Arduino.
- Cliquez sur le bouton Upload dans l'IDE Arduino pour envoyer le code au Arduino Nano.
- Placez un obstacle devant le capteur pendant un certain temps, puis retirez-le.
- Consultez le résultat sur le moniteur série.
Code Arduino Nano pour détecter un obstacle
Étapes rapides
- Copiez le code et ouvrez-le avec l'IDE Arduino.
- Cliquez sur le bouton Upload de l'IDE Arduino pour compiler et téléverser le code sur l'Arduino Nano.
- Placez un obstacle devant le capteur pendant un moment, puis retirez-le.
- Consultez le résultat sur le moniteur série.