Arduino Nano - RFID - Moteur Servo
Ce tutoriel vous explique comment utiliser un Arduino Nano et un module RFID NFC RC522 pour contrôler un moteur servo. Le processus fonctionne comme suit :
- Lorsqu'une étiquette autorisée est tapée, l'Arduino Nano fera tourner le moteur servo à 90°
- Si la même étiquette autorisée est tapée à nouveau, l'Arduino Nano fera tourner le moteur servo à nouveau à 0°
- Ce cycle se répétera continuellement
Cela peut être utilisé pour sécuriser un placard, un tiroir, une porte, ou pour ouvrir et fermer un distributeur de nourriture pour animaux...
Préparation du matériel
Ou vous pouvez acheter les kits suivants:
| 1 | × | Kit de Capteurs DIYables (18 capteurs/écrans) |
Note d'achat: Si vous utilisez plusieurs servomoteurs, nous recommandons d'utiliser le PCA9685 16 Channel PWM Servo Driver Module pour économiser les broches du MCU et faciliter le câblage.
À propos du module RFID/NFC RC522 et du moteur servo
Si vous ne connaissez pas le module RFID/NFC RC522 et le moteur servo (y compris le brochage, leur fonctionnement et comment les programmer), vous pouvez en apprendre davantage dans les tutoriels suivants :
- Arduino Nano - RFID. tutorial
- Arduino Nano - Moteur Servo. tutorial
Comment ça marche
- Le code Arduino Nano a des UID de balises RFID/NFC prédéfinis.
- Lorsque la balise RFID/NFC est tapée sur le lecteur, l'UID est lu.
- L'Arduino Nano reçoit l'UID du lecteur.
- Il compare ensuite l'UID lu avec les UID prédéfinis.
- Si l'UID correspond à l'un des UID prédéfinis, l'Arduino Nano commande le moteur servo à 90°.
- Lorsque la balise est tapée à nouveau, l'Arduino Nano repositionne le moteur servo à 0°.
- Ce processus est répété continuellement.
Diagramme de câblage
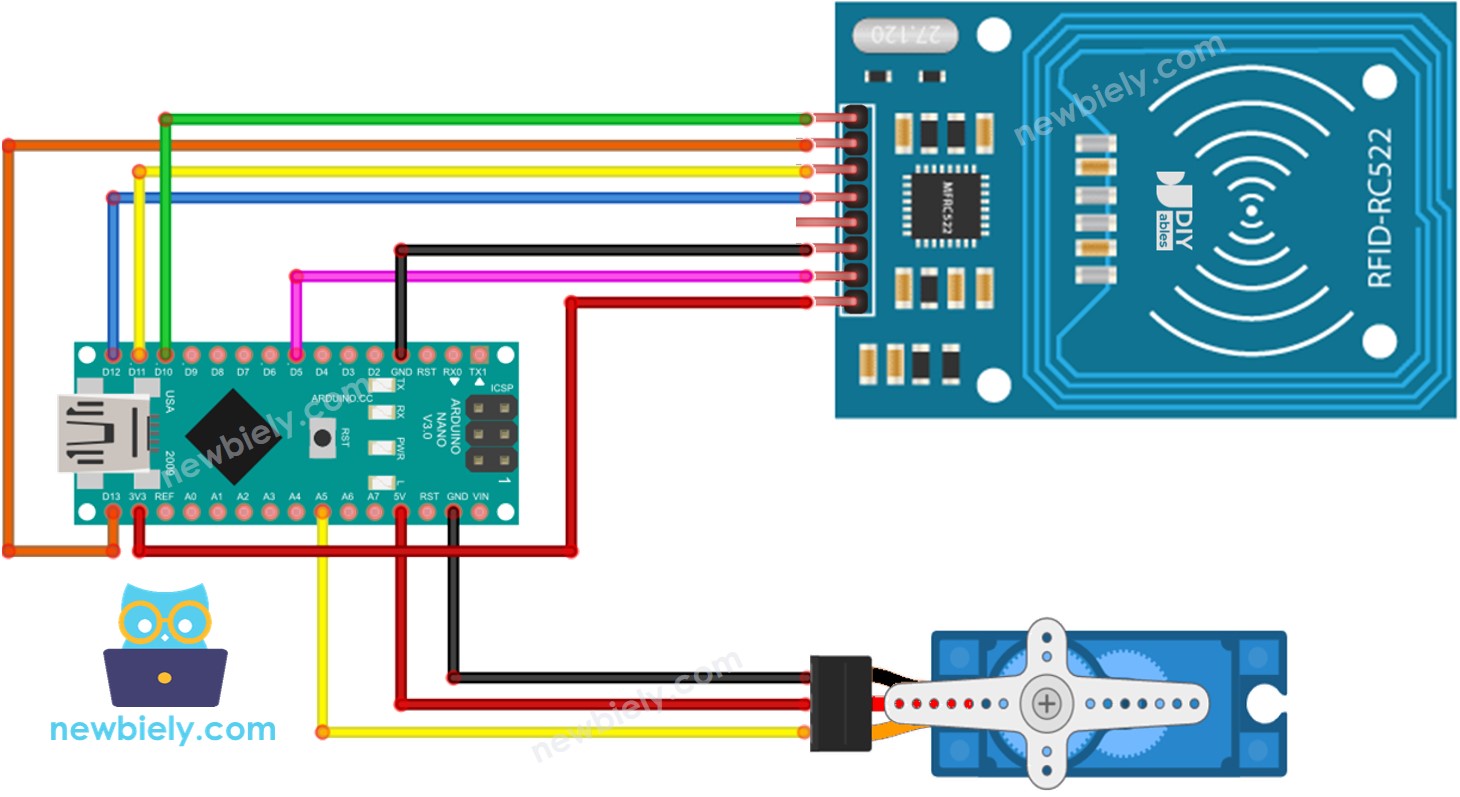
Cette image a été créée avec Fritzing. Cliquez pour agrandir l'image.
Pour des raisons de simplicité, le schéma de câblage ci-dessus est utilisé à des fins de test ou éducatives, et pour un servo-moteur à faible couple. Nous recommandons fortement l'utilisation d'une source d'alimentation externe pour le servo-moteur en pratique. Le schéma de câblage ci-dessous illustre comment connecter le servo-moteur à une source d'alimentation externe.
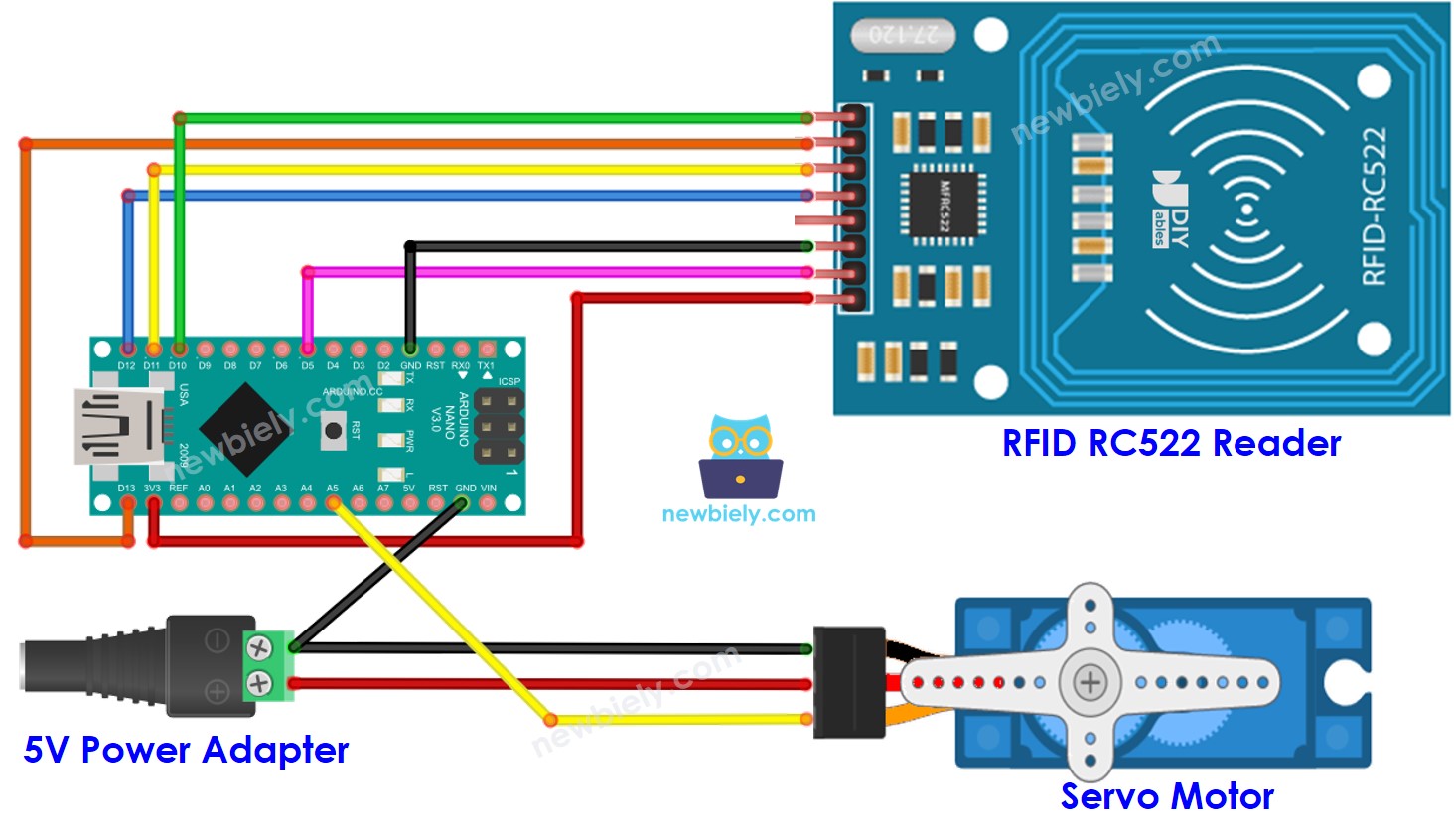
Cette image a été créée avec Fritzing. Cliquez pour agrandir l'image.
Câblage avec le module RFID RC522
Pour simplifier le processus de connexion, les broches du module RC522 sont directement connectées aux broches de l'Arduino. Cependant, cela peut entraîner un dysfonctionnement de l'Arduino dans certains cas, car les broches de sortie de l'Arduino produisent une tension de 5V tandis que les broches du module RC522 fonctionnent à une tension standard de 3.3V. Il est donc conseillé de réguler la tension entre les broches de l'Arduino et celles du module RC522. Pour plus de détails, veuillez consulter le tutoriel Arduino Nano - RFID.. Le diagramme suivant illustre comment réguler de 5V à 3.3V à l'aide de résistances :
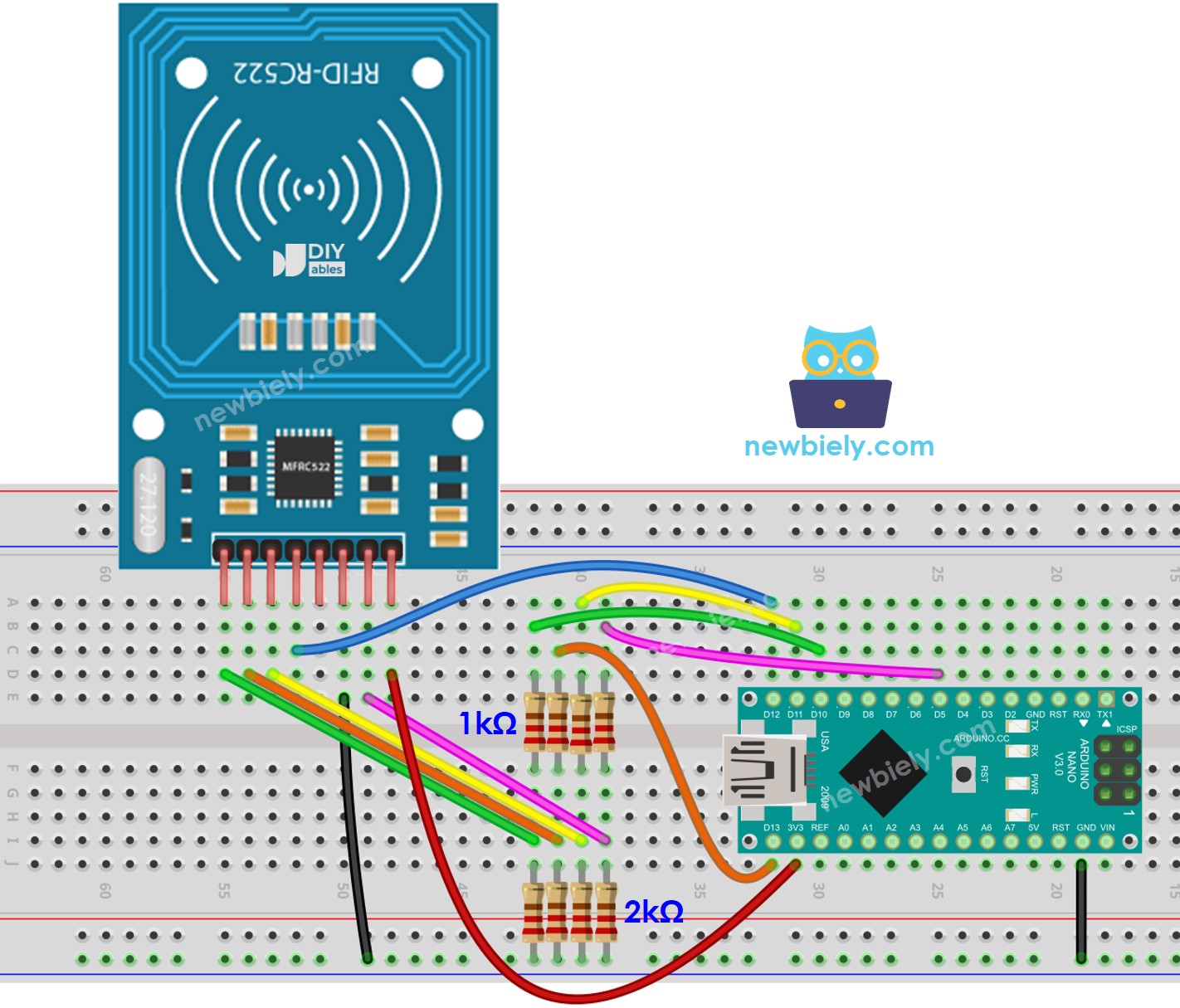
Cette image a été créée avec Fritzing. Cliquez pour agrandir l'image.
Voir Comment alimenter un Arduino Nano..
※ Note:
L'agencement des broches peut varier selon le fabricant. UTILISEZ TOUJOURS les étiquettes imprimées sur le module. L'image ci-dessus montre le schéma de brochage des modules du producteur DIYables.
Tableau de câblage du module RFID/NFC RC522
| RFID/NFC RC522 | Arduino Nano |
|---|---|
| SS | → 10 |
| SCK | → 13 |
| MOSI | → 11 |
| MISO | → 12 |
| IRQ(not connected) | |
| GND | → GND |
| RST | → 9 |
| VCC | → 3.3V |
Tableau de câblage du moteur servo
| Servo Motor | Arduino | 5V DC Adapter |
|---|---|---|
| VCC (red) | → positive | |
| GND (brown) | → negative | |
| SIG (yellow) | → A5 |
Tableau de câblage de l'adaptateur 5V DC
| 5V DC Adapter | Servo Motor | Arduino Nano |
|---|---|---|
| Positive | → VCC | |
| Positive | -> Vin | |
| Negative | → GND | |
| Negative | → GND |
Code Arduino Nano - Balise RFID/NFC unique
Étapes rapides
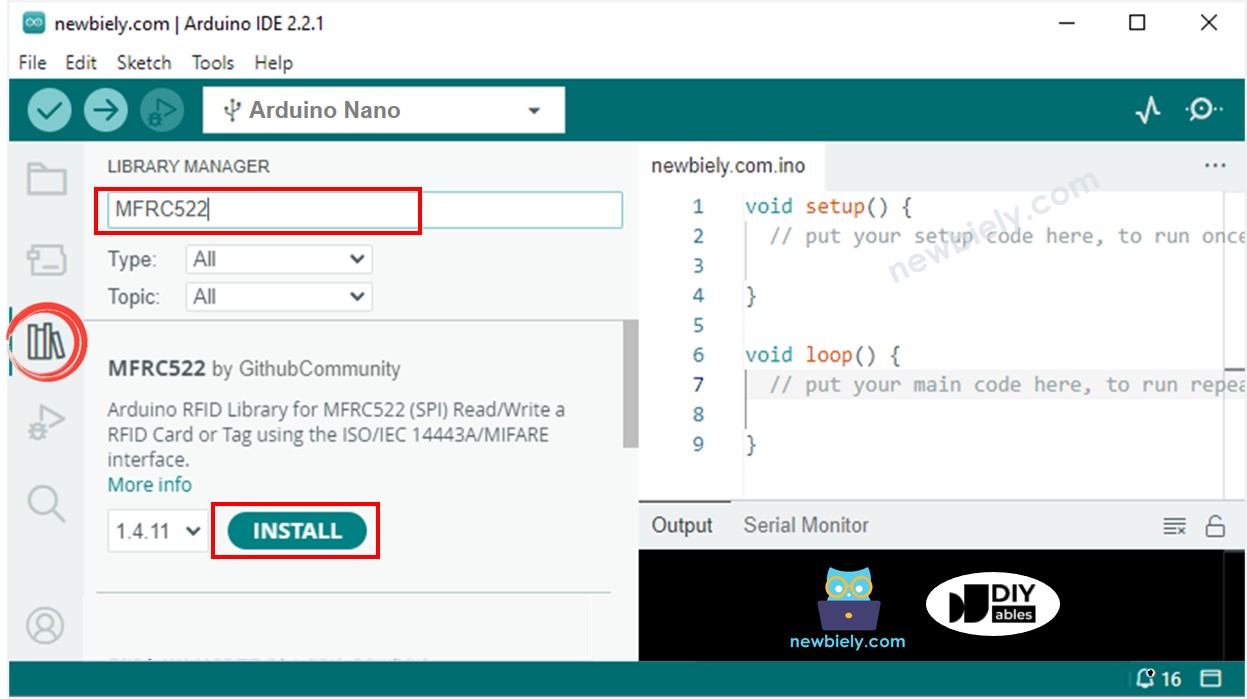
- Cliquez sur l'icône Libraries dans la barre gauche de l'IDE Arduino.
- Recherchez "MFRC522" et trouvez la bibliothèque par GithubCommunity.
- Appuyez sur le bouton Install pour installer la bibliothèque MFRC522.
Afin de déterminer l'UID d'une étiquette RFID/NFC, la première étape consiste à télécharger le code sur l'IDE Arduino. Cela peut être fait en :
- Copier le code et l'ouvrir dans l'IDE Arduino
- Cliquer sur le bouton Upload
- Ouvrir le moniteur série
- Taper l'étiquette RFID/NFC sur le module RFID-RC522
- Visualiser l'UID sur le moniteur série
Après avoir obtenu l'UID :
- Remplacez la valeur de authorizedUID à la ligne 20 du code par l'UID obtenu. Par exemple, changez byte authorizedUID[4] = {0xFF, 0xFF, 0xFF, 0xFF}; en byte authorizedUID[4] = {0x3A, 0xC9, 0x6A, 0xCB};
- Téléversez de nouveau le code sur la carte Arduino Nano
- Placez une étiquette RFID/NFC sur le module RFID-RC522
- Le moteur servo tournera à 90°
- Vérifiez la sortie sur le moniteur série
- Tapez à nouveau sur l'étiquette RFID/NFC sur le module RFID-RC522.
- Le moteur servo va tourner à 0° et la sortie sera visible sur le moniteur série.
- Appuyez sur un tag RFID ou NFC contre le module RFID-RC522.
- Consultez la sortie sur le moniteur série.