Arduino Mega - Contrôler un moteur pas à pas avec le pilote L298N
Prêt à apprendre comment contrôler des moteurs pas à pas avec votre Arduino ? Vous êtes au bon endroit ! Ce tutoriel complet vous guidera à travers tout ce que vous devez savoir sur l'utilisation d'un pilote L298N pour contrôler des moteurs pas à pas bipolaires. Que vous construisiez une imprimante 3D, un robot, ou un système de positionnement automatisé, maîtriser le contrôle des moteurs pas à pas vous ouvre un monde de possibilités de mouvements précis.
Ne vous inquiétez pas si vous débutez avec les moteurs pas à pas – ils peuvent sembler complexes au premier regard, mais avec les bons conseils, vous les trouverez incroyablement utiles et étonnamment faciles à utiliser. Contrairement aux moteurs DC classiques qui tournent en continu, les moteurs pas à pas se déplacent par étapes précises et contrôlées, les rendant parfaits pour les applications où vous avez besoin d'un positionnement exact et de mouvements répétables.
Dans ce tutoriel pratique, nous couvrirons tout depuis le câblage de base jusqu'aux techniques de programmation avancées. Vous apprendrez à contrôler la position avec une précision millimétrique, ajuster la vitesse et l'accélération en douceur, et changer de direction sans effort. Nous utiliserons le populaire moteur pas à pas NEMA 17 comme exemple, mais les principes s'appliquent à tout moteur pas à pas bipolaire à 4 fils que vous pourriez rencontrer dans vos projets.
À la fin de ce tutoriel, vous aurez la confiance nécessaire pour intégrer des moteurs pas à pas dans vos propres projets créatifs. Des sliders d'appareil photo automatisés aux machines CNC de précision, les compétences que vous apprendrez ici serviront de fondation pour d'innombrables créations passionnantes. Plongeons-nous et apportons des mouvements de précision à vos projets Arduino Mega !
Dans ce tutoriel, nous allons apprendre :
- Comment utiliser le pilote L298N pour contrôler un moteur pas à pas bipolaire
- Comment contrôler la position du moteur pas à pas
- Comment contrôler la vitesse du moteur pas à pas
- Comment contrôler la direction du moteur pas à pas
Le tutoriel s'applique à tous types de moteurs pas à pas bipolaires (4 fils). Le tutoriel prendra le moteur pas à pas NEMA 17 comme exemple.
Matériel Requis
Ou vous pouvez acheter les kits suivants:
| 1 | × | Kit de Capteurs DIYables (18 capteurs/écrans) |
À propos du moteur pas à pas
Les moteurs pas à pas sont des dispositifs fascinants qui convertissent les impulsions électriques en rotation mécanique précise. Pensez à eux comme aux outils de précision ultimes du monde des moteurs – au lieu de tourner librement comme les moteurs DC classiques, ils se déplacent par étapes exactes et répétables. Cela les rend absolument parfaits pour les applications où vous devez savoir exactement où votre moteur est positionné à tout moment.
Il existe deux types populaires de moteurs pas à pas que vous rencontrerez dans vos projets Arduino Mega :
- Moteurs pas à pas bipolaires : Ces moteurs ont 4 fils et offrent un excellent couple et une excellente précision. C'est le type sur lequel nous nous concentrerons dans ce tutoriel car ils sont incroyablement polyvalents et largement utilisés dans tout, des imprimantes 3D aux bras robotiques.
- Moteurs pas à pas unipolaires : Ceux-ci viennent avec soit 5 soit 6 fils et sont légèrement plus faciles à contrôler mais fournissent généralement moins de couple que leurs cousins bipolaires.
Voici un conseil utile : si vous avez un moteur pas à pas unipolaire à 6 fils qui traîne, vous avez de la chance ! Vous pouvez réellement utiliser quatre des six fils et le contrôler exactement comme un moteur pas à pas bipolaire. Cela vous donne plus de flexibilité dans vos choix de composants et vous aide à tirer le meilleur parti de ce que vous avez dans votre collection de pièces.
Pour les projets de moteurs pas à pas unipolaires à 5 fils, nous avons un tutoriel dédié couvrant Arduino - Contrôle du moteur pas à pas 28BYJ-48 avec le pilote ULN2003. Mais aujourd'hui, nous plongeons profondément dans les moteurs pas à pas bipolaires parce qu'ils offrent des performances supérieures et sont incroyablement populaires dans les projets sérieux de makers.
Ce qui rend les moteurs pas à pas bipolaires spéciaux, c'est leur construction interne avec deux bobines (appelées phases) qui créent des champs magnétiques. En énergisant ces bobines dans des séquences spécifiques, nous pouvons faire tourner l'arbre du moteur par incréments précis. Ce niveau de contrôle est ce qui les rend indispensables pour les applications nécessitant un positionnement précis, comme les gimbals d'appareil photo, les montures de télescope automatisées, ou les équipements de mesure de précision.
Brochage du moteur pas à pas bipolaire
Comprendre le brochage est plus simple qu'il n'y paraît ! Ne vous inquiétez pas – une fois que vous voyez le motif, connecter votre moteur pas à pas deviendra naturel. Le brochage du moteur pas à pas bipolaire a 4 broches qui correspondent aux deux bobines internes. Selon les fabricants, les broches du moteur ont plusieurs conventions de nommage, mais elles font toutes référence au même concept de base.
Le tableau ci-dessous montre quelques conventions de nommage de broches largement utilisées que vous rencontrerez :
| N° BROCHE | Nommage 1 | Nommage 2 | Nommage 3 |
|---|---|---|---|
| 1 | A+ | A | A |
| 2 | A- | A | C |
| 3 | B+ | B | B |
| 4 | B- | B | D |
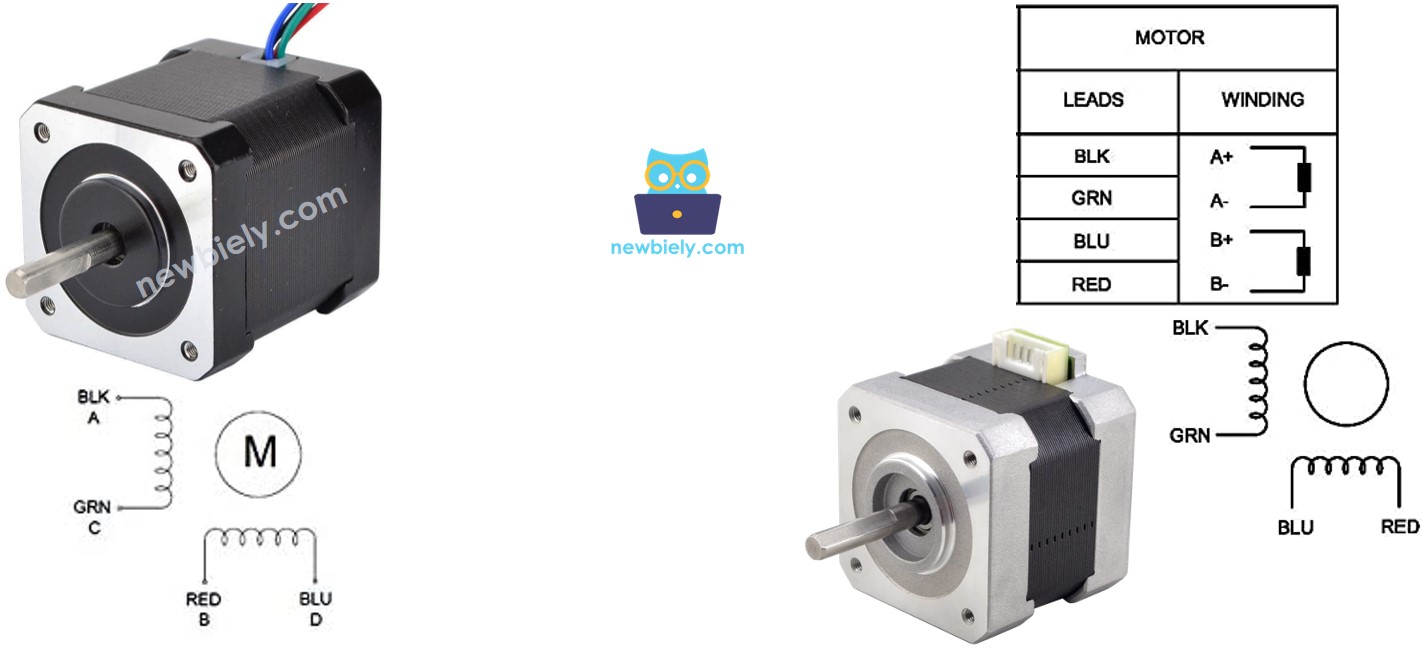
Voici quelque chose d'important à garder à l'esprit : l'ordre des broches, le nommage des fils, et le codage couleur des fils peuvent varier considérablement entre les fabricants. Cela peut sembler déroutant au début, mais ne vous découragez pas ! La clé est de toujours vérifier la datasheet ou le manuel qui vient avec votre moteur spécifique. Pensez-y comme un système de codage couleur – une fois que vous savez quelle couleur va avec quelle bobine, c'est parti.
L'image ci-dessus montre les spécifications de deux moteurs différents avec des nommages de fils et des codages couleur différents. Remarquez comment les mêmes connexions électriques peuvent avoir des schémas de couleurs complètement différents ? C'est pourquoi lire la documentation est si important – cela vous évite les suppositions et la frustration potentielle plus tard.
Conseil de pro : Quand vous obtenez un nouveau moteur pas à pas, prenez un moment pour identifier les paires de bobines en utilisant un multimètre. Vérifiez simplement la continuité entre les fils – les fils qui montrent une continuité appartiennent à la même bobine. Ce simple test peut vous faire économiser beaucoup de temps de dépannage !
Étapes par révolution
Comprendre les étapes par révolution est crucial pour un positionnement précis dans vos projets de moteur pas à pas Arduino Mega. Chaque moteur pas à pas a une spécification qui vous indique le degré par étape (appelons cela DEG_PER_STEP), qui est comme la "résolution" du moteur – avec quelle finesse il peut se déplacer. La beauté des moteurs pas à pas est que vous pouvez les contrôler en utilisant différentes méthodes pour atteindre différents niveaux de précision.
La spécification du moteur spécifie le degré par étape (appelons cela DEG_PER_STEP). Selon la méthode de contrôle, les étapes par révolution (appelons cela STEP_PER_REVOLUTION) sont calculées selon le tableau suivant :
| Méthode de contrôle | Étapes par révolution | Degré réel par étape |
|---|---|---|
| Full-step | STEP_PER_REVOLUTION = 360 / DEG_PER_STEP | DEG_PER_STEP |
| Half-step | STEP_PER_REVOLUTION = (360 / DEG_PER_STEP) * 2 | DEG_PER_STEP / 2 |
| Micro-step (1/n) | STEP_PER_REVOLUTION = (360 / DEG_PER_STEP) * n | DEG_PER_STEP / n |
Laissez-moi décomposer cela avec un exemple pratique que vous rencontrerez fréquemment. La plupart des moteurs pas à pas NEMA 17 (ceux couramment utilisés dans les imprimantes 3D) ont une spécification de 1,8 degré par étape. Voici comment les calculs fonctionnent :
| Méthode de contrôle | Étapes par révolution | Degré réel par étape |
|---|---|---|
| Full-step | 200 étapes/révolution | 1,8° |
| Half-step | 400 étapes/révolution | 0,9° |
| Micro-step (1/n) | (200 * n) étapes/révolution | (1,8 / n)° |
Cette flexibilité est ce qui rend les moteurs pas à pas si puissants ! Vous voulez un mouvement doux et précis pour un slider d'appareil photo ? Utilisez le micro-stepping. Besoin d'un couple maximal pour soulever des objets lourds ? Le mode full-step vous donne la puissance de maintien maximale. Le choix vous appartient selon les besoins spécifiques de votre projet.
Comment contrôler un moteur pas à pas avec Arduino
C'est là que les choses deviennent passionnantes – votre Arduino Mega est parfaitement capable de générer les signaux de timing précis nécessaires pour contrôler les moteurs pas à pas. Cependant, il y a une considération importante : les signaux de contrôle de votre Arduino, bien que parfaitement chronométrés, n'ont pas assez de tension et de courant pour réellement piloter le moteur pas à pas directement. Pensez à votre Arduino Mega comme le "cerveau" qui sait exactement quand envoyer des signaux, mais il a besoin de "muscle" pour faire bouger réellement le moteur.
C'est là qu'un pilote matériel devient essentiel. Le pilote agit comme un amplificateur intelligent qui fait deux tâches critiques pour votre projet de moteur pas à pas Arduino Mega :
- Amplification du signal : Il prend les signaux de contrôle de faible puissance de votre Arduino Mega et les amplifie aux niveaux de tension et de courant dont votre moteur pas à pas a besoin pour fonctionner efficacement.
- Protection : Il crée une barrière de protection entre votre délicat Arduino Mega et les exigences de courant/tension élevés du moteur pas à pas, empêchant tout dommage électrique à votre microcontrôleur.
Il existe de nombreux types différents de pilotes matériels disponibles pour contrôler les moteurs pas à pas, chacun avec leurs propres avantages. Certains sont conçus pour des applications haute précision, d'autres pour des moteurs haute puissance, et certains privilégient la facilité d'utilisation pour les débutants. Le pilote L298N offre un excellent équilibre – il est assez puissant pour la plupart des projets, abordable, largement disponible, et convivial pour les débutants.
Le pilote L298N est particulièrement populaire dans la communauté Arduino Mega car il peut gérer des tensions jusqu'à 35V et des courants jusqu'à 2A par canal, le rendant adapté à une large gamme de moteurs pas à pas. De plus, il est incroyablement tolérant et robuste, ce qui signifie que vous êtes moins susceptible de l'endommager accidentellement pendant l'apprentissage.
À propos du pilote L298N
Le pilote L298N est le meilleur ami de votre moteur pas à pas et un choix fantastique pour les projets Arduino Mega ! Ce module polyvalent est comme avoir un contrôleur de moteur professionnel dans un package compact et abordable. Ce qui le rend vraiment spécial, c'est sa conception à double usage – un seul pilote L298N peut contrôler soit deux moteurs DC séparés OU un moteur pas à pas, vous donnant une flexibilité incroyable dans vos projets.
Dans ce tutoriel, nous nous concentrons sur l'utilisation du L298N pour contrôler les moteurs pas à pas, mais il vaut la peine de savoir que vous pourriez facilement réutiliser le même pilote pour d'autres projets basés sur des moteurs plus tard. Pensez-y comme un investissement dans votre bibliothèque de composants qui vous servira bien à travers plusieurs constructions.
Le L298N se distingue parce qu'il peut gérer des exigences de puissance sérieuses – jusqu'à 35V et 2A par canal – ce qui couvre la plupart des applications d'amateurs et même semi-professionnelles. Que vous construisiez une machine CNC de bureau, un dolly d'appareil photo, ou un système de positionnement de précision, ce pilote a la puissance nécessaire pour faire le travail de manière fiable.
Brochage du pilote L298N
Jetons un œil au brochage – ne vous inquiétez pas, c'est plus simple qu'il n'y paraît ! Comprendre ces connexions est la clé pour faire fonctionner votre projet de moteur pas à pas en douceur. Une fois que vous comprenez ce que fait chaque broche, connecter tout devient simple et logique.
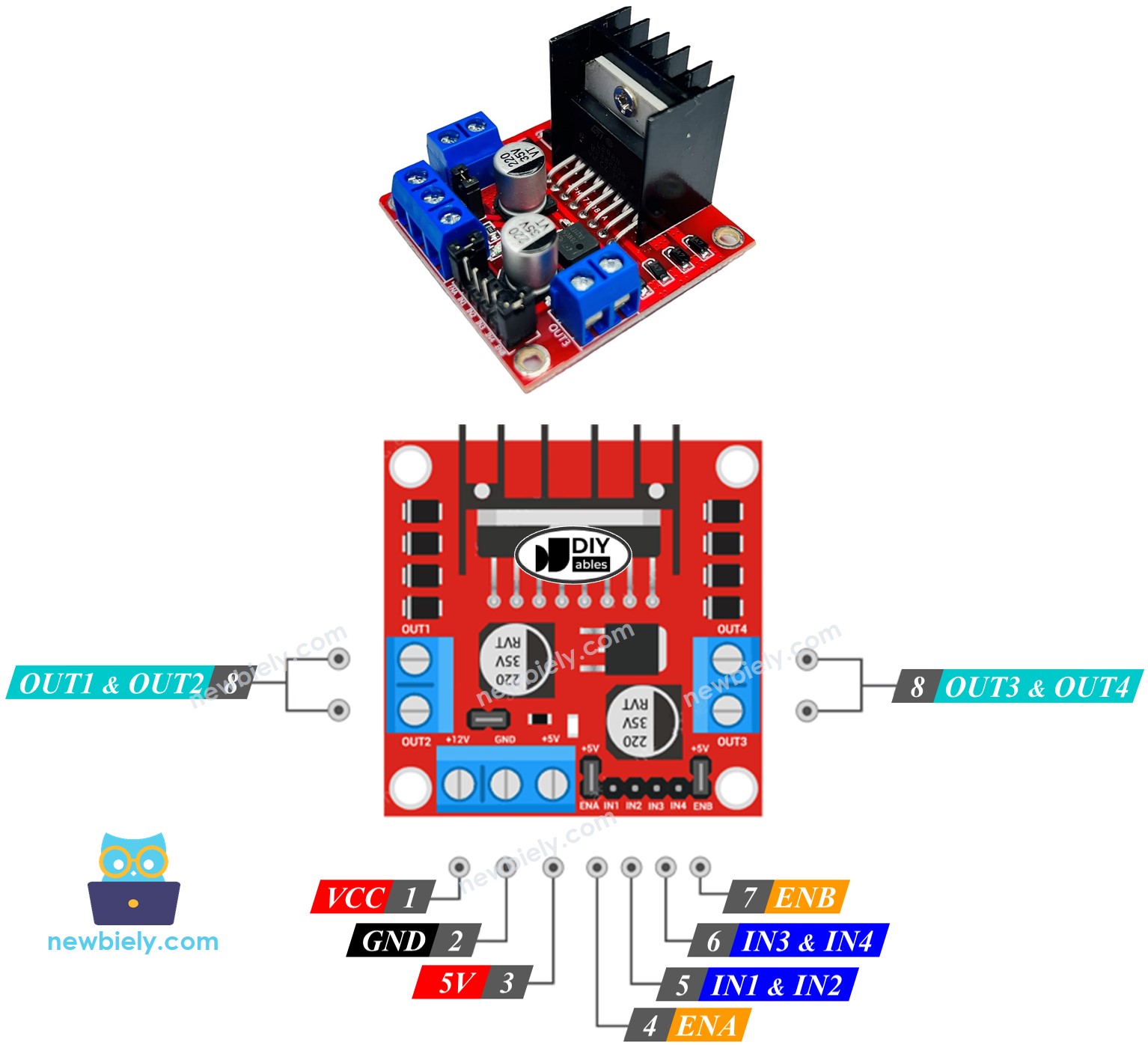
Le pilote L298N a 11 broches et trois cavaliers qui travaillent ensemble pour vous donner un contrôle complet sur votre moteur pas à pas. Laissez-moi vous expliquer chacune d'elles pour que vous vous sentiez confiant en faisant ces connexions :
Broches d'alimentation :
- Broche VCC : C'est la broche d'alimentation principale pour votre moteur pas à pas. Connectez-la à votre alimentation externe, qui peut être n'importe où entre 5V et 35V selon les exigences de votre moteur. La plupart des moteurs NEMA 17 fonctionnent très bien avec 12V.
- Broche GND : C'est votre connexion de masse commune qui doit être connectée à GND (0V) de votre Arduino Mega et de votre alimentation. Pensez-y comme le "point de référence" électrique pour tout votre circuit.
- Broche 5V : Cela fournit l'alimentation pour les circuits logiques internes du module L298N. Vous pouvez connecter cela à la sortie 5V de votre Arduino, ou si vous gardez le cavalier 5V-EN en place, il obtient automatiquement l'alimentation depuis l'entrée VCC.
Broches de signal de contrôle :
- Broches IN1, IN2, IN3, IN4 : Ce sont vos broches d'entrée de contrôle qui se connectent directement aux broches numériques de votre Arduino. Votre Arduino Mega envoie des signaux de timing à travers ces broches pour dire au pilote exactement quand énergiser chaque bobine de votre moteur pas à pas. C'est comme avoir une ligne de communication directe entre le cerveau de votre Arduino et le muscle du pilote moteur.
Broches de sortie moteur :
- Broches OUT1, OUT2, OUT3, OUT4 : Ce sont les broches de sortie haute puissance qui se connectent directement aux quatre fils de votre moteur pas à pas. Le pilote utilise celles-ci pour envoyer les signaux amplifiés qui font réellement bouger votre moteur.
Cavaliers d'activation et de contrôle :
- Cavaliers ENA, ENB : Ces petits cavaliers sont comme des interrupteurs marche/arrêt pour le contrôle moteur. Gardez les cavaliers ENA & ENB en place pour activer votre moteur pas à pas. Les retirer désactiverait les sorties moteur.
- Cavalier 5V-EN : Ce cavalier détermine comment le module obtient son alimentation logique. Gardez-le en place pour les projets simples (l'alimentation vient de VCC), ou retirez-le si vous voulez fournir 5V séparément pour une gestion d'alimentation plus avancée.
Conseil de pro : Pour la plupart des projets de moteur pas à pas Arduino Mega, vous pouvez garder les trois cavaliers en place et vous concentrer sur la connexion des fils principaux d'alimentation, de contrôle et de moteur. Cela garde les choses simples pendant que vous apprenez !
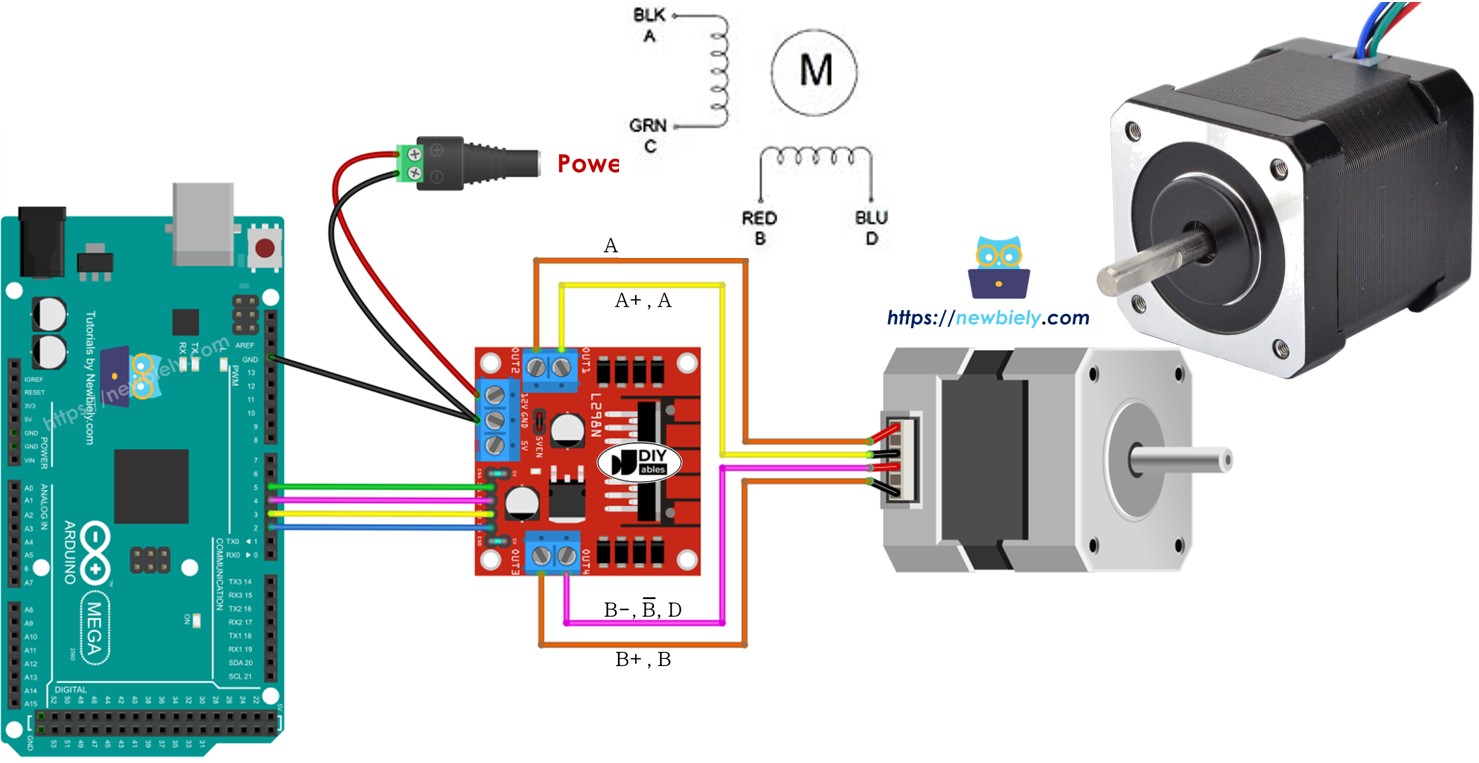
Schéma de câblage
Maintenant la partie passionnante – connectons tout ensemble ! Le câblage peut sembler complexe au premier regard, mais je promets que c'est plus simple qu'il n'y paraît. Prenez votre temps avec ces connexions, et vérifiez chaque fil avant d'alimenter votre projet.
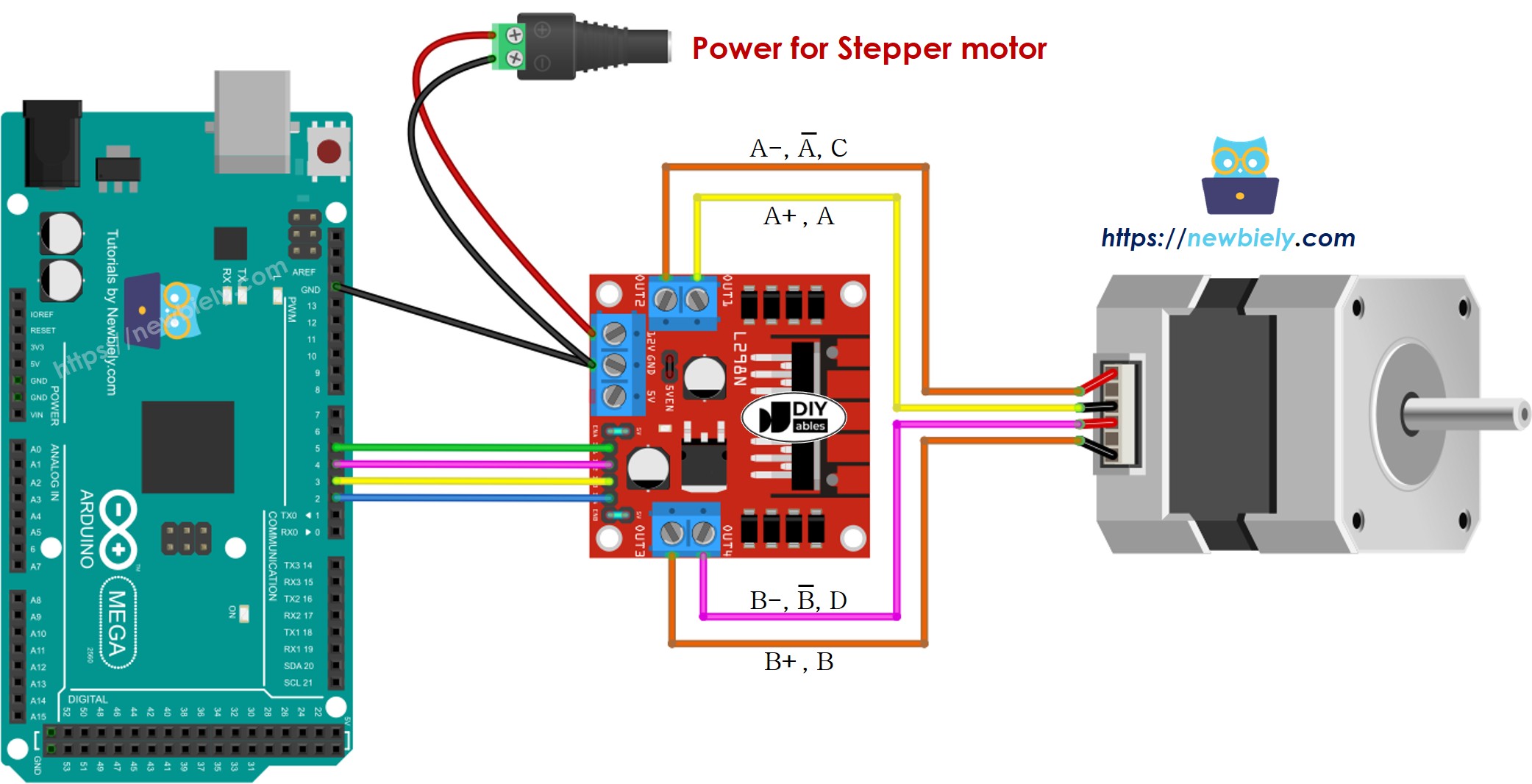
Cette image a été créée avec Fritzing. Cliquez pour agrandir l'image.
Note de sécurité importante : Veuillez vous assurer de vérifier toutes vos connexions avant d'appliquer l'alimentation. Bien que le pilote L298N soit assez robuste, un câblage incorrect peut endommager à la fois votre Arduino Mega et le pilote moteur. Il vaut toujours mieux passer une minute supplémentaire à vérifier les connexions que de traiter avec des composants grillés plus tard !
※ Note:
- Veuillez garder les trois cavaliers sur le module L298N en place (au cas où l'alimentation du moteur ≤ 12V)
- L'ordre des broches sur les moteurs pas à pas peut varier entre les fabricants. Veuillez vérifier le tableau ci-dessous pour un câblage correct.
Tableau de câblage entre Arduino Mega et le pilote L298N
Ces connexions créent le chemin de communication entre le cerveau de votre Arduino et la logique de contrôle du L298N :
| Broches Arduino Mega | Broches L298N |
|---|---|
| 5 | IN1 |
| 4 | IN2 |
| 3 | IN3 |
| 2 | IN4 |
Tableau de câblage entre le pilote L298N et le moteur pas à pas
Important ! Voici où vous devez faire particulièrement attention : Veuillez ne pas vous fier uniquement à l'ordre des fils montré dans l'image du schéma de câblage ci-dessus. C'est juste un exemple visuel, et l'ordre réel des broches sur votre moteur pas à pas peut être complètement différent selon votre fabricant. C'est la source la plus commune de confusion pour les débutants, mais une fois que vous l'avez bien fait, votre moteur fonctionnera parfaitement !
La clé est de faire correspondre correctement les paires de bobines. Assurez-vous que votre câblage suit ce tableau de connexion logique :
| Broches L298N | Broches moteur pas à pas | Ou | Ou |
|---|---|---|---|
| OUT1 | A+ | A | A |
| OUT2 | A- | A | C |
| OUT3 | B+ | B | B |
| OUT4 | B- | B | D |
Avant d'acheter un moteur pas à pas, je recommanderais fortement de vérifier la datasheet, les spécifications, ou le manuel qui l'accompagne. Les fabricants de qualité fournissent toujours la correspondance entre les couleurs de fils et les noms de bobines. Par exemple, ce moteur pas à pas fournit une correspondance claire comme montré dans l'image ci-dessous :
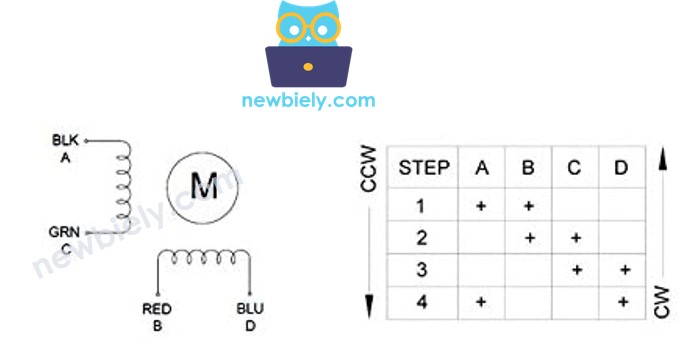
Basé sur cette correspondance spécifique, votre tableau de câblage devient beaucoup plus clair :
| Broches L298N | broches moteur pas à pas | couleur de fil |
|---|---|---|
| OUT1 | A | fil noir |
| OUT2 | C | fil vert |
| OUT3 | B | fil rouge |
| OUT4 | D | fil bleu |
※ Note:
Voici un conseil utile : Dans tous les tableaux de câblage ci-dessus, vous pouvez réellement échanger OUT1 avec OUT2, ou OUT3 avec OUT4, et votre moteur fonctionnera toujours parfaitement ! Cependant, si vous faites ces échanges, la direction de rotation du moteur pourrait être inversée (sens horaire devient antihoraire, et vice versa). Cela peut réellement être utile si vous devez changer de direction sans modifier votre code !
Comment contrôler un moteur pas à pas en utilisant un pilote L298N
Maintenant la partie amusante – donnons vie à votre projet de moteur pas à pas avec du code ! Ne vous inquiétez pas si vous débutez en programmation de moteur pas à pas ; nous allons tout parcourir étape par étape. La beauté de travailler avec Arduino Mega est qu'il existe d'excellentes bibliothèques disponibles qui gèrent tous les calculs de timing complexes pour vous.
Contrôler un moteur pas à pas manuellement serait assez difficile – vous devriez gérer des séquences de timing précises, gérer les courbes d'accélération, et coordonner plusieurs broches simultanément. Heureusement, grâce à l'incroyable bibliothèque AccelStepper, contrôler les moteurs pas à pas devient non seulement gérable, mais réellement agréable !
Un mot sur le choix de bibliothèque : Arduino IDE inclut une bibliothèque Stepper intégrée, mais nous recommandons fortement de l'éviter pour les projets sérieux. Voici pourquoi la bibliothèque intégrée n'est pas suffisante :
- Fonctionnement bloquant : La bibliothèque fournit seulement des fonctions bloquantes, ce qui signifie que votre Arduino Mega ne peut rien faire d'autre en contrôlant le moteur pas à pas. Cela limite sévèrement les capacités de votre projet.
- Fonctionnalité limitée : Il lui manque des fonctionnalités essentielles comme le contrôle d'accélération, les changements de vitesse fluides, et les fonctions de positionnement avancées qui donnent à vos projets une sensation professionnelle.
Au lieu de cela, nous recommandons avec enthousiasme la bibliothèque AccelStepper, qui est comme avoir un contrôleur de moteur professionnel intégré dans votre code. Cette incroyable bibliothèque offre :
- Accélération et décélération fluides : Vos moteurs démarreront et s'arrêteront gracieusement, réduisant le stress mécanique et éliminant les mouvements saccadés.
- Fonctionnement non-bloquant : Votre Arduino Mega peut contrôler le moteur pas à pas tout en lisant simultanément des capteurs, mettant à jour des affichages, ou gérant les entrées utilisateur.
- Support multi-moteurs : Contrôlez plusieurs steppers simultanément avec des vitesses et positions indépendantes.
- Support Full-step et Half-step : Choisissez le bon équilibre entre couple et douceur pour votre application.
Note : La bibliothèque AccelStepper ne supporte pas le microstepping, mais pour la plupart des projets Arduino Mega, les modes full-step et half-step fournissent d'excellentes performances et précision.
Comment contrôler la position du moteur pas à pas via le pilote L298N
Positionner votre moteur pas à pas est incroyablement simple avec la bibliothèque AccelStepper. Pensez-y comme dire à votre moteur "va à cet endroit exact" – et il s'y rendra en douceur et avec précision :
La beauté de cette approche est que vous pensez en termes de positions absolues plutôt que d'essayer de compter les étapes manuellement. Vous voulez bouger exactement une révolution complète ? Calculez simplement les étapes par révolution et utilisez ce nombre. Besoin de retourner à votre position de départ ? Utilisez simplement moveTo(0).
Notes importantes pour le succès :
La fonction stepper.moveTo() est non-bloquante, ce qui est fantastique pour créer des projets Arduino Mega réactifs et multi-tâches. Cependant, cette fonctionnalité puissante vient avec quelques considérations importantes qui assureront que votre moteur pas à pas fonctionne parfaitement :
- Appelez stepper.run() fréquemment : Cette fonction doit être appelée aussi souvent que possible, idéalement dans votre fonction loop() principale. Pensez-y comme donner à votre moteur des "battements de cœur" réguliers pour le maintenir en mouvement fluide.
- Évitez delay() quand le moteur bouge : La fonction delay() arrête tout votre programme Arduino Mega, empêchant stepper.run() d'être appelée. Cela rendra le mouvement de votre moteur saccadé ou le fera s'arrêter entièrement.
- Minimisez la sortie Serial pendant le mouvement : Les fonctions comme Serial.print() et Serial.println() peuvent considérablement ralentir votre boucle, causant un mouvement moteur irrégulier. Utilisez-les avec parcimonie quand le moteur est actif.
Suivre ces directives assure un contrôle moteur fluide et d'apparence professionnelle qui impressionnera quiconque voit votre projet en action !
Comment contrôler la vitesse du moteur pas à pas via le pilote L298N
Le contrôle de vitesse est là où les moteurs pas à pas brillent vraiment, et la bibliothèque AccelStepper rend incroyablement facile d'atteindre un contrôle de mouvement de niveau professionnel. Vous n'êtes pas limité à juste régler une vitesse – vous pouvez créer des profils d'accélération et de décélération fluides qui donnent à vos projets une apparence et un son professionnels :
Comprendre les paramètres :
- setAcceleration() : Cela contrôle avec quelle rapidité votre moteur atteint sa vitesse cible. Une valeur plus élevée signifie une accélération plus rapide (plus agressive), tandis qu'une valeur plus faible crée des changements de vitesse plus fluides et plus graduels. Pour la plupart des projets, des valeurs entre 50-200 fonctionnent merveilleusement.
- setSpeed() : Cela définit la vitesse maximale de votre moteur en étapes par seconde. Rappelez-vous, c'est la vitesse de pointe – votre moteur accélérera en douceur à cette vitesse plutôt que de sauter immédiatement à cette vitesse.
La fonction d'accélération est particulièrement précieuse parce qu'elle élimine le mouvement de démarrage-arrêt saccadé qui peut causer du stress mécanique et faire sonner vos projets de façon non professionnelle. Au lieu de cela, votre moteur pas à pas accélérera et ralentira gracieusement, créant un mouvement fluide et linéaire qui est parfait pour les sliders d'appareil photo, les systèmes de positionnement, et les machines de précision.
Comment contrôler la direction du moteur pas à pas via le pilote L298N
Le contrôle de direction avec les moteurs pas à pas est magnifiquement simple et intuitif. Si vous avez suivi nos instructions de câblage ci-dessus, votre moteur se comportera de manière prévisible et logique :
Rotation sens horaire : Se produit quand vous vous déplacez d'une position