Arduino - Pilote de moteur pas à pas DRV8825
#NOTE: TRANSLATED TO FRENCH
Prêt à apprendre comment contrôler des moteurs pas à pas avec précision ? Vous êtes au bon endroit ! Ce tutoriel Arduino sur le pilote de moteur pas à pas DRV8825 vous guidera à travers tout ce que vous devez savoir pour faire tourner votre moteur pas à pas de manière fluide et précise. Que vous construisiez votre première imprimante 3D, machine CNC, ou projet robotique, maîtriser le pilote DRV8825 est une compétence essentielle qui ouvrira d'innombrables possibilités.
Dans ce tutoriel complet, nous explorerons le puissant pilote de moteur pas à pas DRV8825 et vous montrerons exactement comment l'utiliser avec votre Arduino pour obtenir un contrôle précis du moteur. Ne vous inquiétez pas si vous débutez avec les moteurs pas à pas ou les pilotes - nous décomposerons tout en étapes faciles à comprendre que chacun peut suivre. Le DRV8825 est l'un des pilotes de moteur pas à pas les plus populaires dans la communauté des makers, et pour de bonnes raisons - il est fiable, polyvalent, et étonnamment facile à utiliser une fois que vous comprenez les bases.
Ce qui rend ce tutoriel spécial, c'est que nous vous montrerons non seulement comment le faire fonctionner, mais nous expliquerons aussi pourquoi il fonctionne de cette façon. Vous apprendrez le microstepping, la limitation de courant, et toutes les fonctionnalités qui font du DRV8825 un choix fantastique pour le contrôle précis de moteur. À la fin de ce guide, vous aurez la confiance d'intégrer le contrôle de moteur pas à pas dans vos propres projets et comprendrez exactement ce qui se passe en coulisses.
En détail, nous apprendrons :
- Ce qu'est le module pilote de moteur pas à pas DRV8825 et pourquoi il est si populaire
- Comment fonctionne le module pilote DRV8825 et ses caractéristiques clés
- Comment connecter le pilote DRV8825 à Arduino et au moteur pas à pas en toute sécurité
- Comment programmer Arduino pour contrôler un moteur pas à pas via le module DRV8825 avec précision
- Les configurations de microstepping pour un mouvement fluide et précis
- Applications pratiques et idées de projets passionnants pour inspirer votre prochaine construction
La beauté de cette configuration est que vous obtiendrez un contrôle de moteur pas à pas de niveau professionnel avec seulement quelques connexions simples. Imaginez pouvoir créer des mouvements fluides et précis pour des sliders de caméra, des systèmes d'arrosage automatisés de plantes, ou même votre propre machine CNC de bureau. C'est le pouvoir que vous aurez une fois que vous maîtriserez ce tutoriel !
Matériel requis
Ou vous pouvez acheter les kits suivants:
| 1 | × | Kit de Capteurs DIYables (18 capteurs/écrans) |
À propos du pilote de moteur pas à pas DRV8825
Le DRV8825 est un module pilote de moteur pas à pas puissant et polyvalent qui est devenu le choix de référence pour les makers, ingénieurs et passionnés qui ont besoin d'un contrôle précis de moteur dans leurs projets. Pensez à lui comme le pont intelligent entre les signaux numériques de votre Arduino et le mouvement mécanique de votre moteur pas à pas - il prend de simples impulsions de votre microcontrôleur et les convertit en motifs de courant complexes nécessaires pour faire bouger votre moteur pas à pas de manière fluide et précise.
Ce remarquable petit module est largement utilisé pour contrôler des moteurs pas à pas bipolaires dans des applications allant des imprimantes 3D de bureau et machines CNC aux bras robotiques et systèmes de caméra automatisés. Ce qui rend le DRV8825 si spécial, c'est sa combinaison de puissance, précision et fonctionnalités conviviales. Il peut gérer jusqu'à 2,2A par bobine avec un refroidissement approprié (c'est assez de puissance pour la plupart des moteurs NEMA 17 et de nombreux moteurs NEMA 23), fonctionne sur une large gamme de tension de 8,2V à 45V, et offre six options de microstepping différentes incluant les résolutions full-step, 1/2, 1/4, 1/8, 1/16, et 1/32 pas.
La beauté du DRV8825 réside dans son intelligence intégrée et ses fonctionnalités de protection. Il inclut une limitation de courant ajustable (via ce petit potentiomètre que vous verrez sur la carte), une protection contre la surchauffe pour éviter les dommages, et une détection de défaut pour vous informer si quelque chose ne va pas. Ces fonctionnalités signifient que vous pouvez vous concentrer sur votre projet créatif au lieu de vous inquiéter d'endommager accidentellement votre moteur ou pilote. La capacité de microstepping est particulièrement impressionnante - elle vous permet d'obtenir un mouvement incroyablement fluide en divisant chaque pas complet en incréments plus petits, ce qui est essentiel pour les applications nécessitant précision et vibrations minimales.
Ce qui est encore plus excitant, c'est à quel point il est simple à utiliser - malgré toute cette fonctionnalité sophistiquée, vous n'avez besoin que de deux broches Arduino pour contrôler à la fois la vitesse et la direction de votre moteur pas à pas. Cela laisse beaucoup de broches disponibles pour les capteurs, écrans, et autres composants dans votre projet. L'efficacité et la fiabilité du DRV8825 en ont fait un composant standard dans d'innombrables projets réussis, des équipements de fabrication professionnels aux projets de makers du week-end.
Pour en apprendre davantage sur les concepts de moteur pas à pas comme le full-step, microstepping, moteur pas à pas unipolaire et bipolaire, consultez notre tutoriel Arduino - Moteur pas à pas - c'est une excellente base qui aidera tout dans ce tutoriel à avoir un sens parfait !
Il est impressionnant que contrôler la vitesse et la direction d'un moteur pas à pas bipolaire, comme le populaire NEMA 17, ne nécessite que deux broches de votre Arduino. Cette simplicité ouvre un monde de possibilités pour des systèmes multi-axes complexes et laisse de la place pour des capteurs et contrôles additionnels dans vos projets.
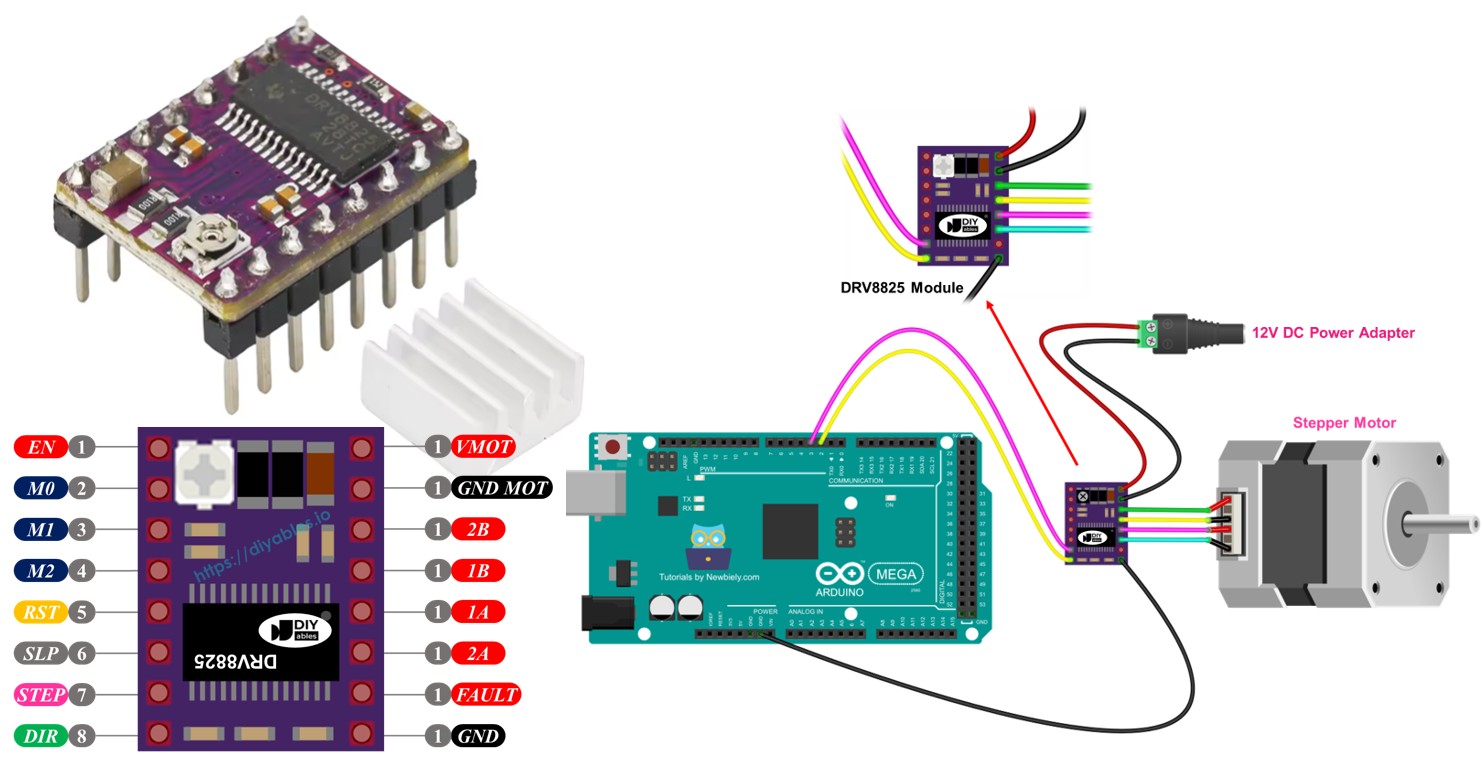
Brochage du pilote de moteur pas à pas DRV8825
Jetons un coup d'œil au brochage du DRV8825 - ne vous inquiétez pas, c'est plus simple que ça en a l'air ! Comprendre ces connexions de broches est la clé pour faire fonctionner votre projet de moteur pas à pas correctement, et une fois que vous verrez à quel point la disposition est logique, vous vous sentirez beaucoup plus confiant pour tout câbler.
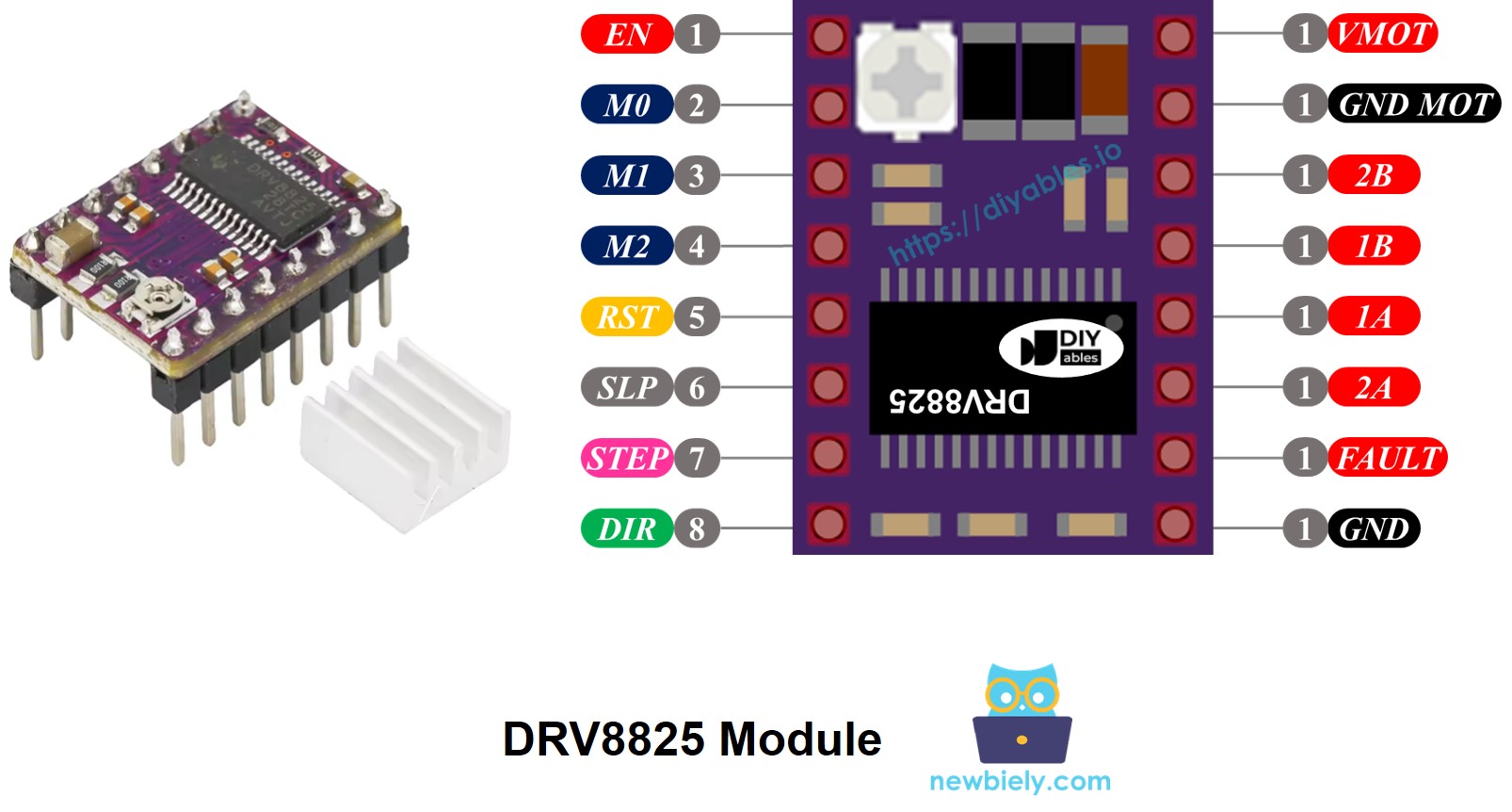
Le pilote de moteur pas à pas DRV8825 a 16 broches qui peuvent sembler écrasantes au premier abord, mais elles sont en fait organisées de manière très logique. Ci-dessous se trouve le brochage complet pour le module pilote de moteur pas à pas DRV8825. Ne vous inquiétez pas si votre module spécifique a des étiquettes légèrement différentes - la fonctionnalité reste la même, et nous vous aiderons à identifier ce qui est quoi.
| Nom de broche | Description |
|---|---|
| VMOT | Alimentation du moteur (8,2 V à 45 V). C'est l'entrée d'alimentation principale qui alimente votre moteur pas à pas - connectez ceci à la borne positive de votre alimentation moteur. |
| GND (pour moteur) | Référence de masse pour l'alimentation du moteur. Ceci crée le circuit complet pour l'alimentation de votre moteur - connectez cette broche à la borne négative de votre alimentation moteur. |
| 2B, 2A | Sorties vers la bobine B du moteur pas à pas. Ces broches délivrent les impulsions de courant contrôlées à une paire de bobines moteur. |
| 1A, 1B | Sorties vers la bobine A du moteur pas à pas. Ces broches contrôlent l'autre paire de bobines moteur, travaillant ensemble avec 2A/2B pour créer la rotation. |
| FAULT | Broche de détection de défaut. Cette broche utile agit comme un moniteur de sécurité - elle passe à LOW quand le pilote détecte des problèmes comme la surchauffe ou le surcourant, permettant à votre Arduino de réagir appropriément. |
| GND (pour logique) | Référence de masse pour les signaux logiques. Ceci doit se connecter à la broche GND de votre Arduino pour assurer que tous les signaux aient le même point de référence. |
| ENABLE | Broche active-Low pour activer/désactiver les sorties moteur. Réglez ceci à LOW pour permettre le mouvement du moteur, HIGH pour verrouiller le moteur en place et réduire la consommation d'énergie. |
| M1, M2, M3 | Broches de sélection de résolution de microstepping. Ces trois broches fonctionnent ensemble comme des interrupteurs pour sélectionner à quel point vous voulez que le mouvement de votre moteur soit fluide (voir le tableau de microstepping ci-dessous). |
| RESET | Broche de reset active-Low. Tirez ceci à LOW pour redémarrer le pilote - utile si vous rencontrez des problèmes ou voulez réinitialiser le système. |
| SLEEP | Broche de veille active-Low. Tirez ceci à LOW pour mettre le pilote en mode veille économe en énergie quand vous n'utilisez pas le moteur. |
| STEP | Broche d'entrée de pas. Chaque front montant d'impulsion que vous envoyez à cette broche fait avancer le moteur d'un pas - c'est là que la magie opère ! |
| DIR | Broche d'entrée de direction. Réglez ceci à HIGH ou LOW pour choisir dans quelle direction votre moteur tourne - c'est si simple ! |
De plus, vous remarquerez qu'il y a un petit potentiomètre (qui ressemble à une petite vis) sur la carte que vous pouvez ajuster soigneusement pour régler la limitation de courant. C'est une fonctionnalité de sécurité cruciale qui aide à prévenir la surchauffe de votre moteur pas à pas et du pilote. Pensez-y comme un contrôle de volume, mais pour le courant électrique - très pratique pour affiner votre configuration !
Voici une façon utile de penser à ces 16 broches - elles sont organisées en groupes logiques basés sur ce à quoi elles se connectent :
- Broches connectées au moteur pas à pas : 1A, 1B, 2A, 2B - ce sont les points de connexion de votre moteur
- Broches connectées à Arduino pour le contrôle du pilote : ENABLE, M1, M2, M3, RESET, SLEEP - celles-ci vous permettent de configurer comment le pilote se comporte
- Broches connectées à Arduino pour le contrôle du mouvement du moteur : DIR, STEP - ce sont les deux broches essentielles qui font bouger votre moteur
- Broche pour le retour vers Arduino : FAULT - celle-ci vous tient informé de la santé du pilote
- Broches connectées à l'alimentation du moteur : VMOT, GND (masse d'alimentation moteur) - celles-ci fournissent la puissance pour votre moteur
- Broche connectée à la masse Arduino : GND (masse logique) - ceci assure que tout communique correctement
Une chose qui rend le DRV8825 particulièrement convivial est qu'il ne nécessite pas d'alimentation logique séparée de votre carte Arduino. Le module tire intelligemment ce dont il a besoin de l'alimentation moteur en utilisant son régulateur de tension 3,3V interne. Cependant, il est absolument essentiel de connecter la masse de votre Arduino à la broche GND (logique) du module DRV8825 - pensez à ceci comme créer un langage commun entre votre Arduino et le pilote pour qu'ils puissent communiquer efficacement.
Une erreur courante de débutant est d'oublier cette connexion de masse, ce qui peut mener à un comportement erratique ou à aucun mouvement du tout. Ne vous inquiétez pas si vous faites cette erreur initialement - cela fait partie du processus d'apprentissage, et une fois que vous vous souvenez de ce détail, vous ne l'oublierez jamais !
Configuration de microstepping
Maintenant plongeons dans l'une des fonctionnalités les plus cool du DRV8825 - le microstepping ! C'est là que les choses deviennent vraiment excitantes parce que le microstepping est ce qui transforme un moteur pas à pas basique faisant des pas grossiers et évidents en mouvements soyeux, fluides et précis qui rivalisent avec des systèmes servo coûteux.
Le pilote DRV8825 permet le microstepping en divisant chaque pas complet en incréments plus petits, un peu comme zoomer sur une photographie pour voir des détails plus fins. Au lieu de sauter d'une position à la suivante, le moteur glisse en douceur en appliquant des niveaux de courant intermédiaires soigneusement calculés aux bobines du moteur. C'est vraiment très ingénieux quand vous y pensez !
Regardons un exemple pratique utilisant le populaire moteur NEMA 17 avec son angle de pas standard de 1,8° (qui équivaut à 200 pas par révolution complète) :
- Mode full-step (1/1) : 200 pas par révolution - c'est le mode de base avec le plus de couple mais avec des pas visibles
- Mode 1/2-step : 400 pas par révolution - nettement plus fluide avec un bon couple
- Mode 1/4-step : 800 pas par révolution - mouvement beaucoup plus fluide, excellent pour la plupart des applications
- Mode 1/8-step : 1600 pas par révolution - très fluide, excellent pour le travail de précision
- Mode 1/16-step : 3200 pas par révolution - extrêmement fluide, parfait pour les caméras et mécanismes délicats
- Mode 1/32-step : 6400 pas par révolution - mouvement ultra-fluide, idéal pour les applications les plus exigeantes
Voici le compromis que vous devez comprendre : lorsque vous augmentez le niveau de microstepping, votre moteur bouge plus en douceur et précisément, mais vous aurez besoin de plus de pas pour compléter chaque révolution. Si vous continuez à utiliser le même taux d'impulsions de pas (impulsions par seconde), chaque révolution prendra plus de temps, ralentissant effectivement le moteur. Pensez-y comme monter des escaliers versus monter une rampe - la rampe est plus fluide mais prend plus de temps pour atteindre la même hauteur si vous maintenez la même cadence.
Cependant, voici la partie excitante - si votre Arduino peut sortir des impulsions assez rapidement pour correspondre au nombre de pas plus élevé, vous pouvez maintenir ou même augmenter la vitesse tout en gagnant toute cette fluidité ! La limite pratique dépend de la rapidité avec laquelle le pilote DRV8825 et votre Arduino peuvent traiter ces impulsions sans perdre de pas. La plupart des projets Arduino peuvent facilement gérer les taux d'impulsions nécessaires pour d'excellentes performances.
Broches de sélection de microstepping du DRV8825
Le DRV8825 dispose de trois entrées de sélection de résolution de microstepping qui fonctionnent comme des interrupteurs numériques : les broches M0, M1, et M2 (certains modules peuvent étiqueter celles-ci comme M1, M2, M3 - même fonctionnalité, numérotation différente). En réglant ces broches à différentes combinaisons de HIGH et LOW, vous pouvez choisir parmi six résolutions de microstepping différentes. C'est comme avoir six "réglages de fluidité" différents pour votre moteur !
| Broche M0 | Broche M1 | Broche M2 | Résolution microstepping | Comportement du moteur |
|---|---|---|---|---|
| Low | Low | Low | Pas complet | Plus de couple, pas visibles, rotation la plus rapide pour un taux d'impulsions donné |
| High | Low | Low | Demi-pas | Bon équilibre entre fluidité et couple |
| Low | High | Low | 1/4 pas | Nettement plus fluide, encore bon couple |
| High | High | Low | 1/8 pas | Mouvement très fluide, excellent pour la plupart des projets |
| Low | Low | High | 1/16 pas | Extrêmement fluide, excellent pour les applications de précision |
| High | Low | High | 1/32 pas | Mouvement ultra-fluide, parfait pour le travail délicat |
| Low | High | High | 1/32 pas | Identique au précédent - plusieurs façons d'obtenir le 1/32 pas |
| High | High | High | 1/32 pas | Fluidité maximale disponible |
Voici un détail utile qui rend le DRV8825 convivial pour les débutants : ces broches de sélection de microstepping ont des résistances de tirage vers le bas intégrées qui les maintiennent automatiquement dans un état LOW par défaut. Cela signifie que si vous ne connectez pas ces broches à quoi que ce soit, votre moteur fonctionnera en mode full-step, ce qui est parfait pour commencer et tester votre configuration. Une fois que vous êtes à l'aise avec le fonctionnement de base, vous pouvez expérimenter avec différents niveaux de microstepping pour trouver l'équilibre parfait entre fluidité, vitesse et couple pour votre projet spécifique.
Beaucoup de débutants commencent avec le microstepping 1/4 ou 1/8 comme compromis idéal - il fournit un mouvement beaucoup plus fluide que le mode full-step sans nécessiter des taux d'impulsions extrêmement élevés de votre Arduino. En gagnant de l'expérience, vous pouvez affiner ces paramètres pour correspondre aux exigences spécifiques de votre projet.
Comment ça fonctionne
Comprendre comment fonctionne le DRV8825 vous donnera la confiance de l'utiliser efficacement dans vos projets, et honnêtement, c'est plus direct que vous pourriez l'attendre ! À sa base, le DRV8825 agit comme un traducteur intelligent entre les signaux numériques simples de votre Arduino et les motifs de courant complexes nécessaires pour faire bouger votre moteur pas à pas avec précision.
Pour contrôler un moteur pas à pas en utilisant le module DRV8825, vous avez besoin d'au moins deux broches Arduino : une pour la broche DIR (direction) et une pour la broche STEP (mouvement). Le DRV8825 interprète ces signaux numériques simples de votre Arduino et les transforme en contrôle de courant sophistiqué nécessaire pour déplacer votre moteur pas à pas avec précision. C'est comme avoir un interprète hautement qualifié qui comprend parfaitement les deux langues !
Voici comment fonctionnent ces deux broches essentielles :
- Broche STEP : C'est là que la magie opère ! Chaque fois que vous envoyez une impulsion (transition LOW vers HIGH) à la broche STEP, le moteur avance d'un micropas ou pas complet, selon votre configuration de microstepping. Pensez-y comme une sonnette - chaque fois que vous la "sonnez" avec une impulsion, le moteur fait un pas en avant. Plus vous envoyez d'impulsions rapidement, plus le moteur tourne vite.
- Broche DIR : Cette broche est magnifiquement simple - elle détermine dans quelle direction votre moteur tourne. Réglez-la à HIGH pour une direction, LOW pour l'autre direction. La grande chose est que vous pouvez changer de direction instantanément juste en changeant l'état de cette broche, même pendant que le moteur fonctionne !
Le DRV8825 prend alors ces signaux simples de votre Arduino, les combine avec ses paramètres de microstepping internes, et génère les motifs de courant précis nécessaires pour énergiser les bobines du moteur à travers les broches de sortie 1A, 1B, 2A, et 2B. Le pilote gère automatiquement tout le timing complexe et le contrôle de courant - vous vous contentez de vous concentrer sur l'envoi d'impulsions de pas et le réglage de la direction !
Ce qui est vraiment pratique, c'est que vous avez de la flexibilité dans la façon dont vous configurez les broches de contrôle supplémentaires sur le module DRV8825 (ENABLE, M1, M2, M3, RESET, SLEEP). Vous pouvez choisir parmi trois approches basées sur les besoins de votre projet :
- Les laisser non connectées - C'est parfait pour les débutants ! Le pilote fonctionnera avec des paramètres par défaut sensés, et vous pouvez vous concentrer sur l'apprentissage des bases sans vous soucier de configurations complexes.
- Les câbler directement à GND ou VCC - Cette approche verrouille un mode de fonctionnement spécifique, ce qui est excellent quand vous savez exactement comment vous voulez que votre système se comporte et n'avez pas besoin de changer les paramètres pendant le fonctionnement.
- Les connecter aux broches Arduino - Cela vous donne une flexibilité maximale ! Vous pouvez contrôler des fonctionnalités comme la résolution de microstepping, activer/désactiver le moteur, et le mode veille dynamiquement dans votre code. C'est fantastique pour des projets avancés où vous pourriez vouloir changer le comportement du moteur basé sur différentes conditions de fonctionnement.
La beauté de cette conception est que vous pouvez commencer simple avec juste les connexions STEP et DIR, vous familiariser avec le contrôle basique du moteur, et puis graduellement ajouter des fonctionnalités plus sophistiquées à mesure que votre confiance et les exigences de votre projet grandissent. C'est une progression d'apprentissage parfaite qui n'accable pas les débutants tout en offrant des capacités de niveau professionnel pour les applications avancées.
Schéma de câblage entre Arduino, module DRV8825 et moteur pas à pas
Maintenant connectons tout ! Ne vous inquiétez pas - le câblage est beaucoup plus direct qu'il pourrait paraître au premier coup d'œil. Nous commencerons avec les connexions minimales nécessaires pour faire tourner votre moteur pas à pas, ce qui est parfait pour apprendre les bases avant de passer à des configurations plus avancées.
Le schéma de câblage suivant vous montre exactement comment connecter votre Arduino, module DRV8825, et moteur pas à pas pour un fonctionnement de base. Avec cette configuration, le pilote DRV8825 fonctionnera dans son mode full-step par défaut, ce qui est idéal pour commencer et s'assurer que tout fonctionne correctement.
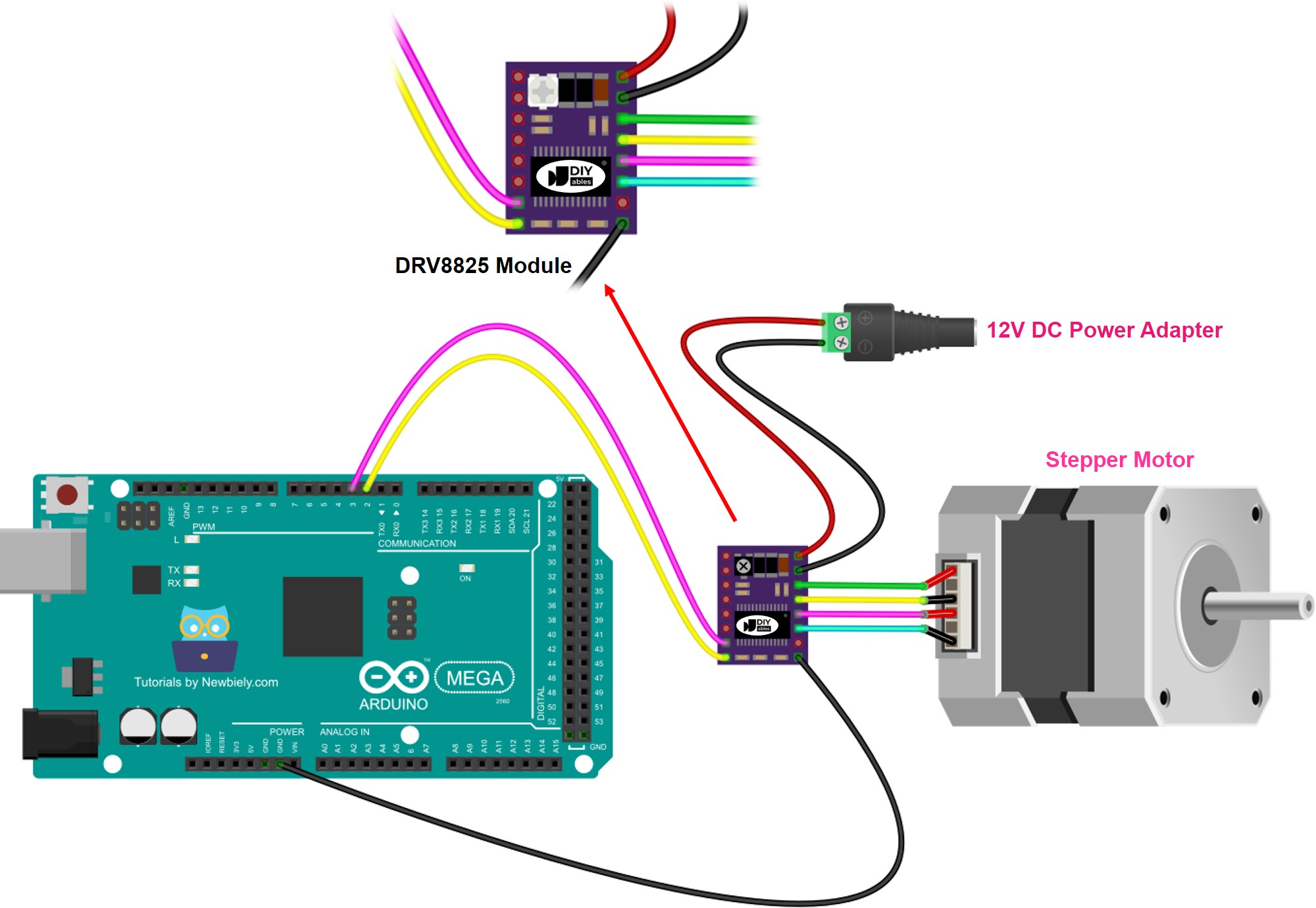
Cette image a été créée avec Fritzing. Cliquez pour agrandir l'image.
Note de sécurité importante : Bien que ce câblage de base fasse fonctionner votre moteur, vérifiez toujours que la tension de votre alimentation correspond aux spécifications de votre moteur pas à pas. Le DRV8825 peut gérer 8,2V à 45V, mais votre moteur pas à pas spécifique peut avoir des exigences différentes. Utiliser une tension incorrecte peut endommager votre moteur ou réduire significativement ses performances.
Voici les connexions essentielles expliquées en détail :
| Broche du composant | Connexion Arduino/Alimentation | But |
|---|---|---|
| VMOT | Alimentation moteur positive (12V) | Fournit la puissance haute intensité nécessaire pour alimenter votre moteur pas à pas |
| GND (Moteur) | Masse alimentation moteur | Complète le circuit d'alimentation moteur - essentiel pour un bon fonctionnement |
| 1A, 1B | Bobine A du moteur pas à pas | Ces broches contrôlent une paire d'enroulements moteur avec des motifs de courant précis |
| 2A, 2B | Bobine B du moteur pas à pas | Ces broches contrôlent la seconde paire d'enroulements moteur pour créer la rotation |
| STEP | Broche numérique Arduino D4 | Chaque impulsion sur cette broche fait avancer le moteur d'un pas |
| DIR | Broche numérique Arduino D3 | Contrôle la direction de rotation - HIGH pour un sens, LOW pour l'autre |
| GND (Logique) | Broche GND Arduino | Connexion critique qui assure que Arduino et pilote communiquent correctement |
| Autres broches | Laissées non connectées | Le pilote utilise les paramètres par défaut - parfait pour commencer |
Prenez votre temps avec ces connexions et vérifiez chacune avant d'alimenter votre système. L'erreur de débutant la plus commune est d'oublier la connexion de masse logique entre l'Arduino et le DRV8825, ce qui peut causer un comportement erratique ou aucun mouvement du tout. Souvenez-vous, cette connexion de masse est ce qui permet à votre Arduino et au pilote de "parler la même langue !"
Un autre détail important : assurez-vous que les connexions de bobine de votre moteur pas à pas correspondent correctement aux paires 1A/1B et 2A/2B. Si votre moteur ne bouge pas en douceur ou fait des bruits inhabituels, vous pourriez devoir échanger les connexions dans une paire de bobines (par exemple, échanger les connexions 1A et 1B). C'est complètement normal et signifie simplement que vous devez faire correspondre la polarité des bobines correctement.
Conseil de pro : Commencez avec une alimentation de tension plus basse (comme 12V) quand vous apprenez, même si votre moteur peut gérer des tensions plus élevées. Cela vous donne un environnement d'apprentissage plus sûr et fournit encore beaucoup de puissance pour la plupart des moteurs NEMA 17. Vous pouvez toujours augmenter la tension plus tard lorsque vous devenez plus à l'aise avec le système !
Code Arduino
Maintenant pour la partie excitante - donnons vie à votre moteur pas à pas avec du code ! Ne vous inquiétez pas si vous débutez en programmation ; nous passerons en revue tout étape par étape, et vous serez étonné de voir à quel point il est simple d'obtenir un contrôle précis du moteur. Les exemples de code ci-dessous vous montreront exactement comment faire tourner votre moteur, changer de direction, et répondre à vos commandes comme un assistant bien entraîné.
Ce code utilise la fantastique bibliothèque AccelStepper, qui rend le contrôle de moteur pas à pas incroyablement facile et puissant. La bibliothèque gère tout le timing complexe et les courbes d'accélération pour vous, donc vous pouvez vous concentrer sur ce que vous voulez que votre moteur fasse plutôt que sur comment le faire arriver. Pensez-y comme avoir un chauffeur professionnel pour votre moteur pas à pas - vous lui dites juste où aller, et il gère tous les détails de conduite de manière fluide et efficace !
Étapes rapides
Nouveau sur Arduino ? Nous recommandons de consulter notre guide Arduino Getting Started - cela aidera tout à avoir du sens et vous donnera la confiance pour aborder ce projet !
- Installer la bibliothèque AccelStepper : Naviguez vers l'icône Libraries dans la barre latérale gauche de votre Arduino IDE, puis recherchez "AccelStepper". Cherchez la bibliothèque AccelStepper par Mike McCau