Arduino Mega - Servomoteur
Ce guide vous montre comment contrôler un servomoteur avec un Arduino Mega. Plus précisément, nous allons apprendre à :
- Programmer Arduino Mega pour faire fonctionner un servomoteur
- Programmer Arduino Mega pour contrôler la vitesse d'un servomoteur
- Utiliser une alimentation externe pour les servomoteurs
Matériel requis
Ou vous pouvez acheter les kits suivants:
| 1 | × | Kit de Capteurs DIYables (18 capteurs/écrans) |
Note d'achat: Si vous utilisez plusieurs servomoteurs, nous recommandons d'utiliser le PCA9685 16 Channel PWM Servo Driver Module pour économiser les broches du MCU et faciliter le câblage.
À propos du servomoteur
Un servomoteur est un petit dispositif qui peut faire tourner un axe, généralement de 0 à 180 degrés. Il est utilisé pour contrôler l'angle de quelque chose.
Brochage
Dans cet exemple, un servomoteur avec trois broches est utilisé :
- Broche VCC : connectez le fil rouge au +5V.
- Broche GND : connectez le fil noir ou marron à la masse.
- Broche Signal : connectez le fil jaune ou orange pour recevoir le signal PWM d'une broche Arduino Mega.
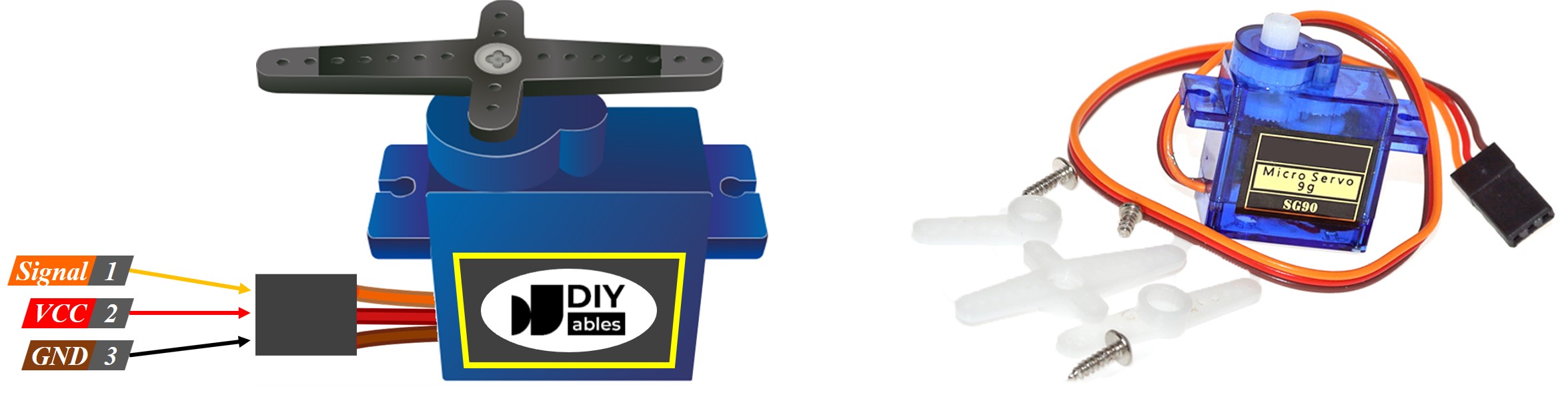
Schéma de câblage
Parfois vous voyez en ligne des schémas de câblage qui connectent la broche d'alimentation du servomoteur (VCC) à la broche 5V de l'Arduino Mega. Il vaut mieux éviter de faire cela, car cela peut endommager la carte Arduino Mega.
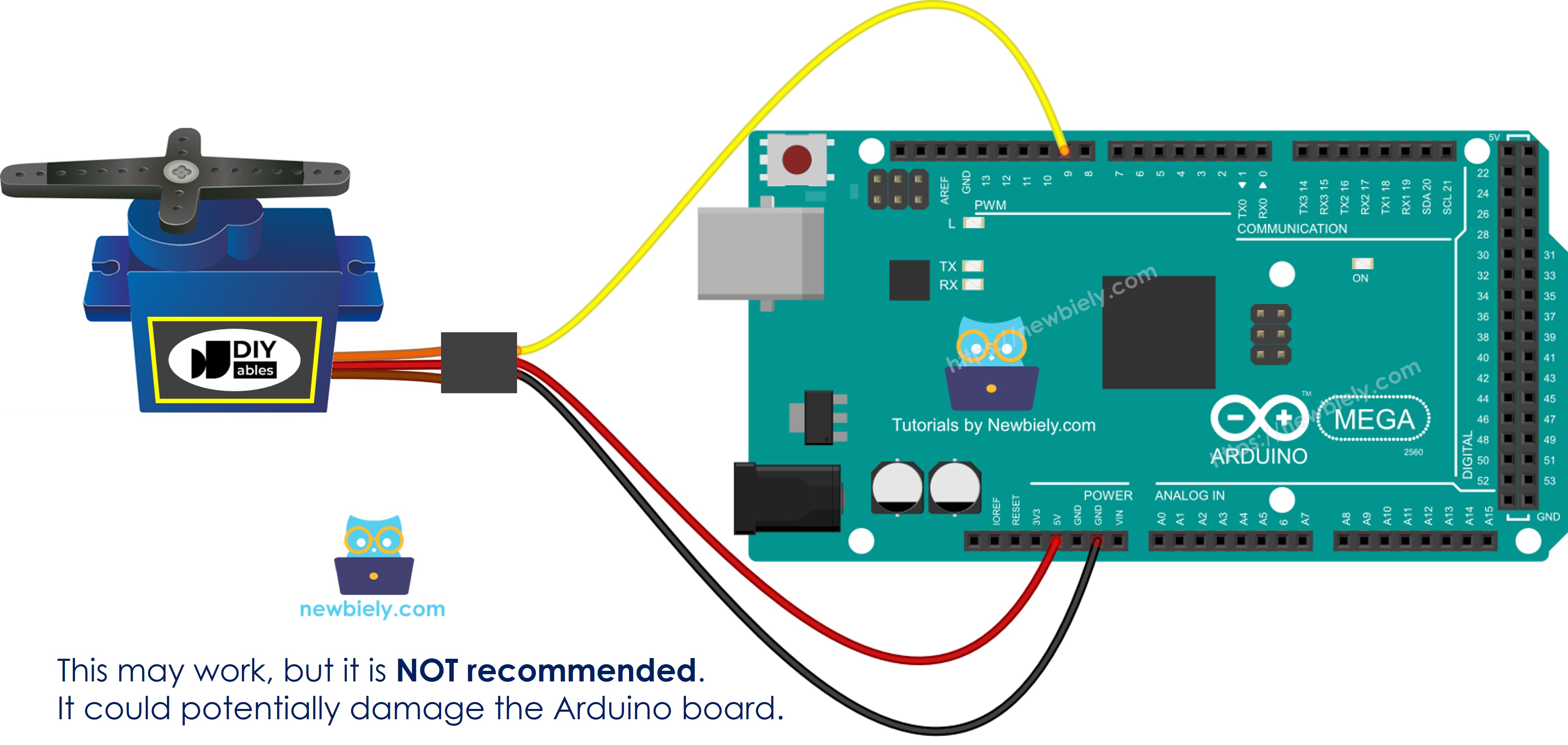
Cette image a été créée avec Fritzing. Cliquez pour agrandir l'image.
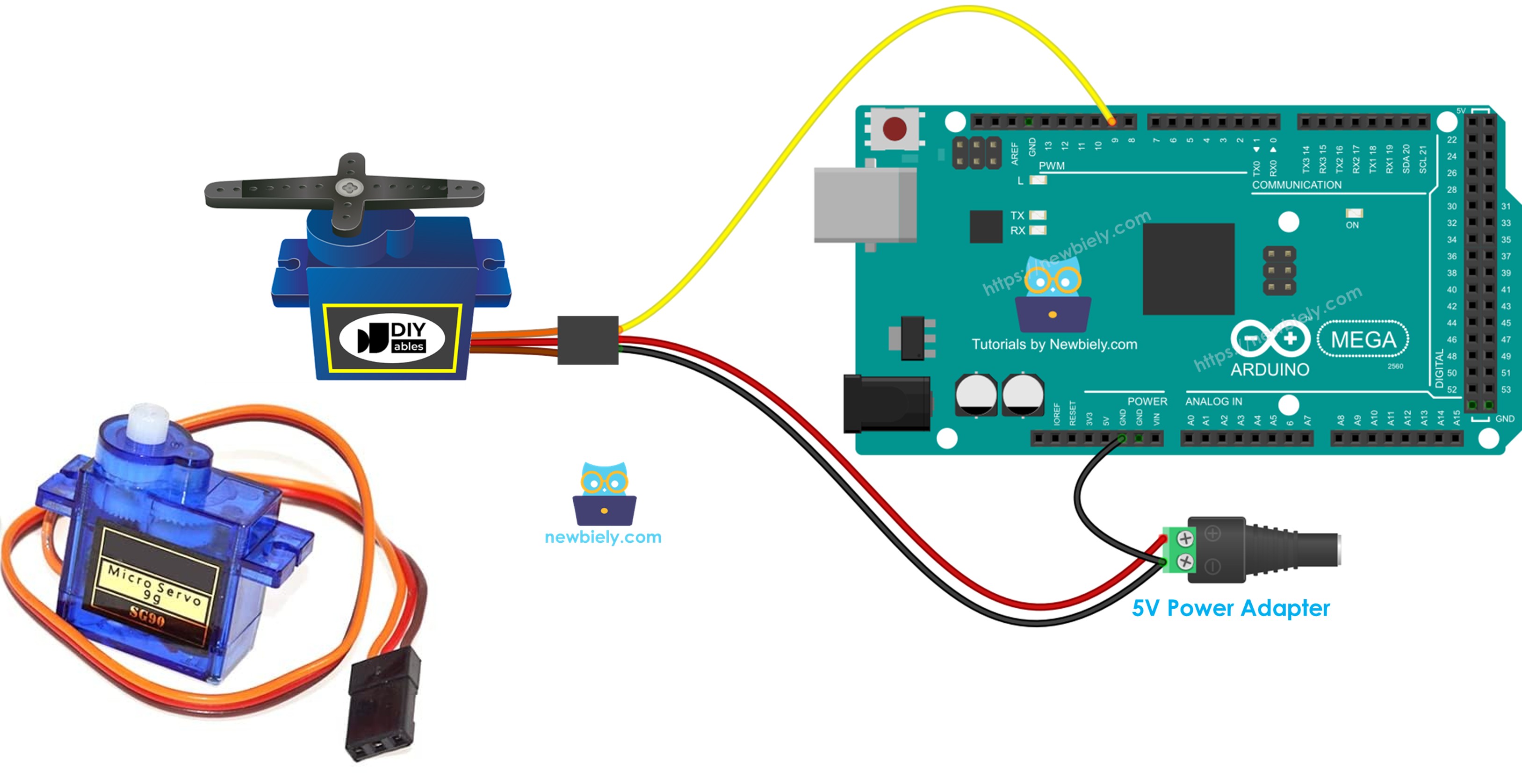
Pour protéger votre Arduino Mega, utilisez une alimentation séparée pour le servomoteur. Le schéma ci-dessous montre comment connecter le servomoteur à cette source d'alimentation.
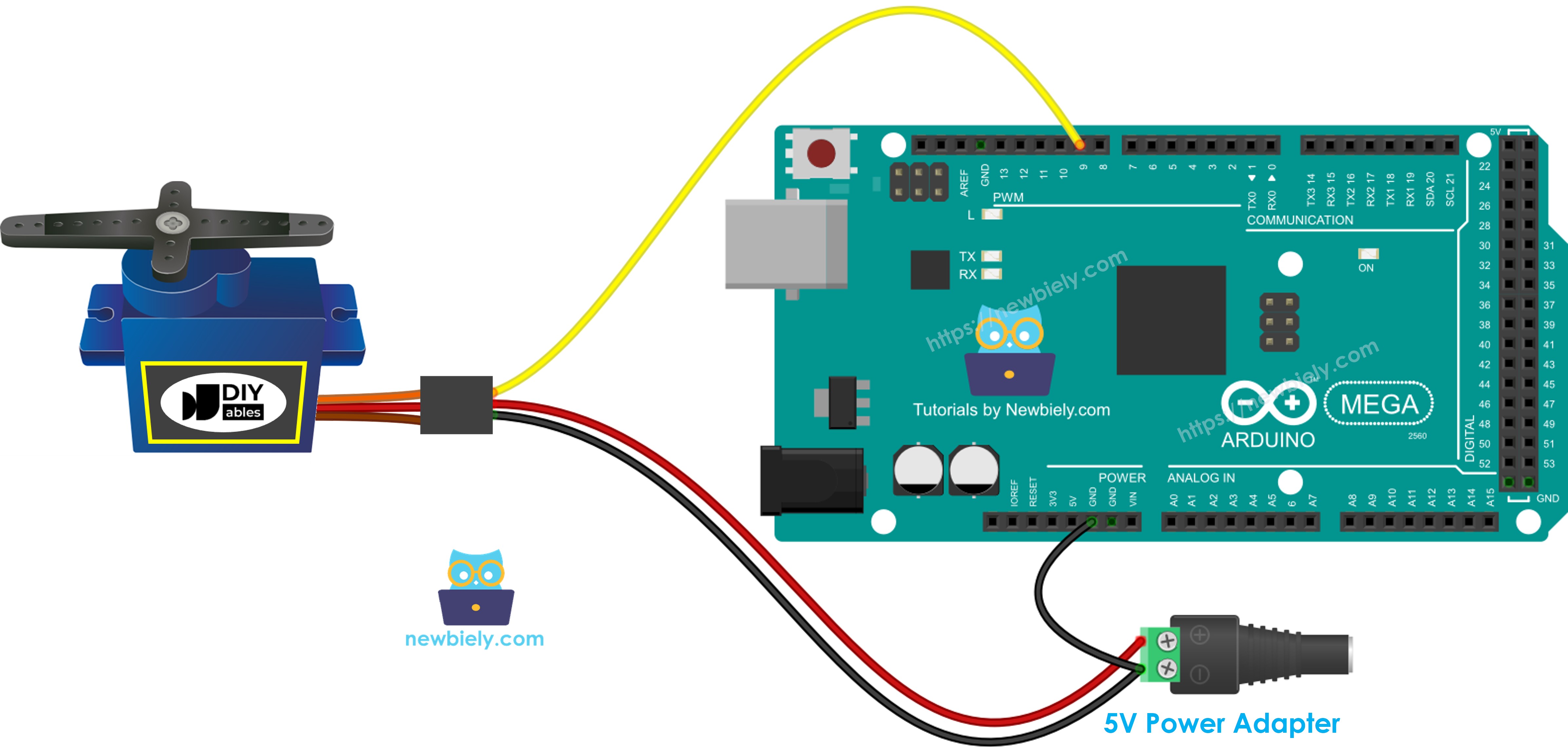
Cette image a été créée avec Fritzing. Cliquez pour agrandir l'image.
Assurez-vous que la masse (GND) de l'alimentation est connectée à la masse de la carte Arduino Mega. Cette étape est très importante pour que cela fonctionne correctement.
Comment programmer pour le servomoteur
- Ajoutez la bibliothèque :
- Créez un objet Servo :
Si vous avez plusieurs servomoteurs, créez simplement plus d'objets Servo.
- Connectez la broche de contrôle de l'Arduino Mega à la broche signal du servomoteur, par exemple la broche 9.
- Enfin, déplacez le servomoteur à l'angle que vous voulez, par exemple 90 degrés.
Code Arduino Mega
Étapes rapides
Suivez ces étapes une par une :
- Câblez les composants comme indiqué dans le schéma.
- Connectez la carte Arduino Mega à votre ordinateur avec un câble USB.
- Ouvrez l'IDE Arduino sur votre ordinateur.
- Choisissez la bonne carte Arduino Mega (par exemple Arduino Mega) et le port COM.
- Copiez et collez le code ci-dessus dans l'IDE Arduino.
- Cliquez sur le bouton Upload dans l'IDE Arduino pour envoyer le code à l'Arduino Mega.

- Observez ce qui se passe : Le servomoteur se déplace lentement de 0 à 180 degrés, puis se déplace lentement de 180 à 0 degrés.
Explication du code
L'explication se trouve dans les commentaires du code Arduino ci-dessus.
Comment contrôler la vitesse du servomoteur
L'utilisation de map() et millis() permet de changer facilement la vitesse d'un servomoteur en douceur, pendant que le reste du programme continue de s'exécuter sans s'arrêter.